اسکنر لیزری Slamtec RPLIDAR سری SLAM (C1 A1 A2 S2 S2L S3) ۳۶۰ درجه، ناوبری و نقشهبرداری ROS1/ROS2
اسکنر لیزری Slamtec RPLIDAR سری SLAM (C1 A1 A2 S2 S2L S3) ۳۶۰ درجه، ناوبری و نقشهبرداری ROS1/ROS2
Slamtec
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
سنسورهای LiDAR سری Slamtec RPLIDAR SLAM (C1، A1، نسخه پرسرعت A1، A2، S2، S2L، S3) برای نقشهبرداری و ناوبری رباتها با اسکن ۳۶۰ درجه و اندازهگیری فاصله طراحی شدهاند. این سنسورها میتوانند با یک کامپیوتر شخصی و پلتفرمهای جاسازی شده مانند Jetson NANO و Raspberry Pi از طریق کابل داده USB استفاده شوند و از یادگیری و توسعه ROS1/ROS2 پشتیبانی میکنند.
ویژگیهای کلیدی
- اسکن ۳۶۰ درجه (محدوده اسکن: ۳۶۰ درجه)
- پشتیبانی از ROS: ROS1/ROS2
- رابط خروجی: پورت سریال UART (۳.3V سطح)
-
گزینههای فناوری اندازهگیری
- مدلهای اندازهگیری مثلثی : A1 / نسخه پرسرعت A1، A2
- مدلهای اندازهگیری TOF (زمان پرواز) : C1، S2/S2L، S3
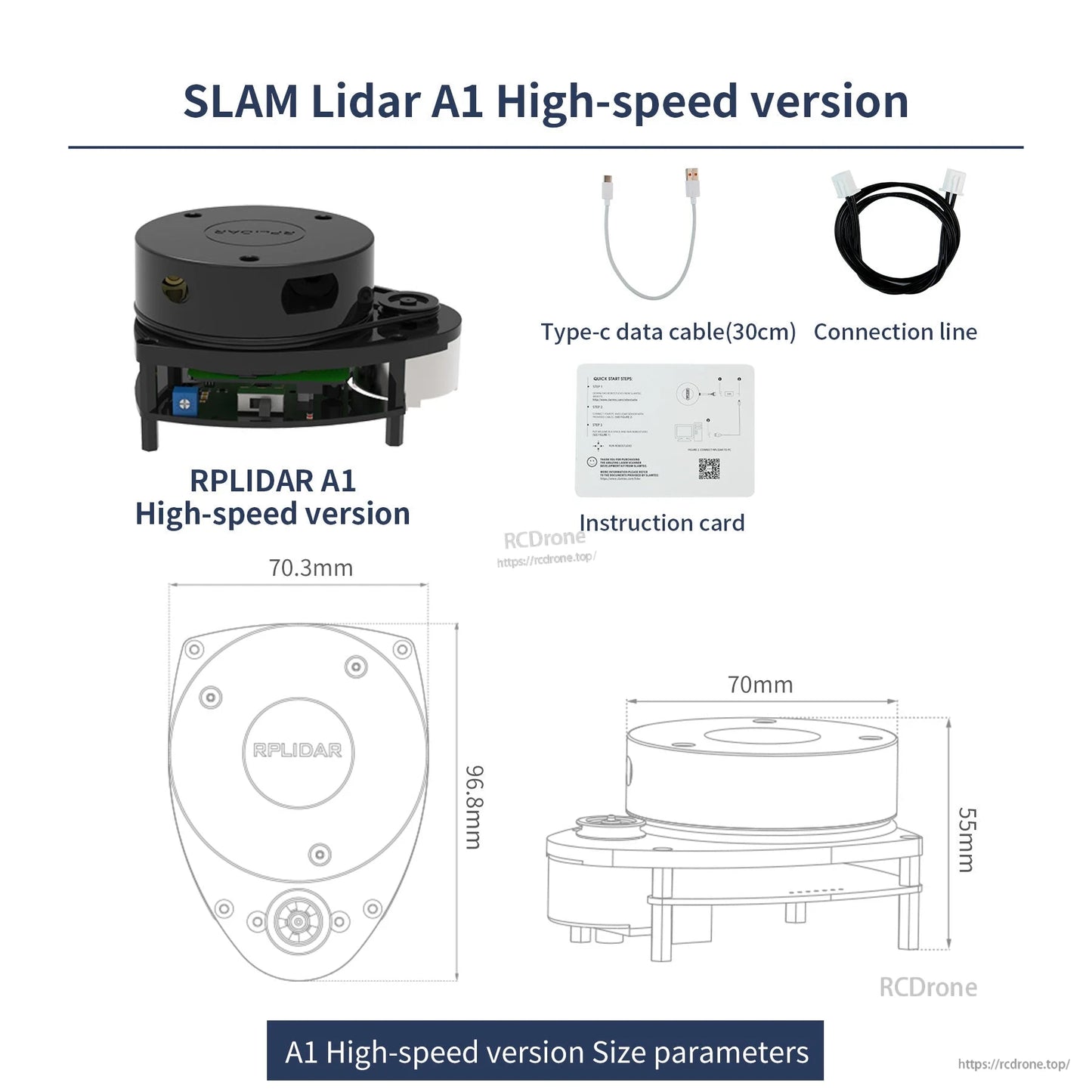
- گزینههای نسخه پرسرعت A1: کنترل فرکانس اسکن بدون پله با دکمه، کنترل سوئیچ برق LiDAR، چیپ پورت سریال USB داخلی؛ کابل داده Type-C میتواند بهطور مستقیم متصل شود (نیاز به برد آداپتور نیست)
- یادداشت اتصال استاندارد A1: برای اتصال از طریق کابل داده micro USB به یک آداپتور پورت سریال نیاز است
مشخصات
عمومی
| ولتاژ منبع تغذیه | 5V |
| دامنه اسکن | 360° |
| پشتیبانی ROS | ROS1/ROS2 |
| خروجی | پورت سریال UART (3.3V level) |
مقایسه مدل (RPLIDAR)
| مدل | اصل اندازهگیری | شعاع اندازهگیری (@بازتابندگی) | حداقل فاصله / ناحیه کور | فرکانس نمونهبرداری | فرکانس اسکن | دقت زاویهای | نرخ ارتباط | ابعاد (میلیمتر) | جریان کاری | توان نامی | رتبهبندی حفاظت | دمای کاری | دقت اندازهگیری | وزن |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A1 (A1M8) | اندازهگیری مثلثی | 12م @90% | 0.15م | 8K (8000 بار در ثانیه) | 1Hz-10Hz (قابل تنظیم) | <=1° | 115.2 kbps | 96.8*70.3*55 | 300mA | 1.5W | - | 0°C-40°C | <0.5mm (<=1.5m); <=1% (1.5-12m) | 172g |
| نسخه A1 با سرعت بالا | فاصلهسنجی مثلثی | - | - | - | 7Hz-16Hz (تنظیم بیپله) | - | - | <96.8*70.3*55- | - | - | - | - | - | |
| A2 (A2M12) | فاصلهسنجی مثلثی | 12m @70% | 0.2m | 16K | 5Hz-15Hz | 0.225° | 256 kbps | φ76*41 | 450mA | 2.25W | - | -10°C-40°C | / | - |
| C1 (C1M1) | فاصلهسنجی TOF | 12m @70% | 0.05m | 5K (5000 بار در ثانیه) | 8Hz-12Hz (قابل تنظیم) | 0.72° | 460.8 kbps | 55.6*55.6*41.3 | 230mA | 1.15W | IP54 | -10°C-40°C | <=30mm (<=12m) | 110g |
| S2 | TOF ranging | 30m @90% | - | 32K | 10Hz | 0.1125° | 1000kbps | 77*77*38.85 | 500mA | 2.5W | IP65 | -10°C-50°C | <=30mm (<=30m) | - |
| S2L | TOF ranging | 18m @90% | 0.05m | 32K (32000 times/s) | 10Hz | 0.1125° | 1000 kbps | 77*77*38.9 | 500mA | 2.5W | IP65 | -10°C-50°C | <=30mm (<=18m) | 190g |
| S3 | TOF ranging | 40m @70% | - | 32K | 10Hz - 20Hz | 0.1125° | - | 55.6*55.6*41.3 | - | - | IP65 | 0°C-50°C | <=25mm (<=8m); <=50mm (8-40m) | - |
کاربردها
- نقشهبرداری و ناوبری رباتها (ROS1/ROS2)
- رباتهای آموزشی و پروژههای سختافزار متنباز
- جاروبرقیهای رباتیک هوشمند و رباتهای خانگی (داخلی)
- کاربردهای اندازهگیری داخلی/خارجی (بسته به مدل)
- مدلسازی سهبعدی رباتهای تجاری یا مصرفی (A2M12)
آموزشها
مواد آموزشی، منابع کد و مواد یادگیری ربات ROS برای این سری LiDAR ارائه شده است. برای کمک در انتخاب مدل یا پشتیبانی فنی پس از فروش، با https://rcdrone.top/ تماس بگیرید یا به ایمیل [email protected]. پیام دهید.
جزئیات

سری SLAM LiDAR را مرور کنید و مدلی را انتخاب کنید که با نیازهای دامنه، سرعت و محیط شما مطابقت دارد.
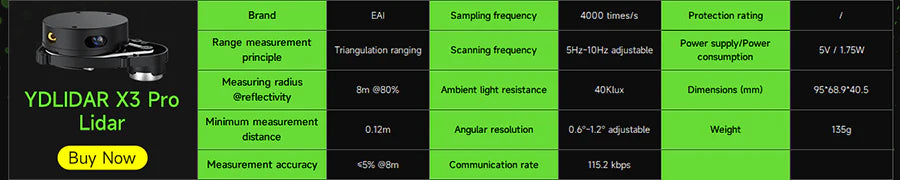
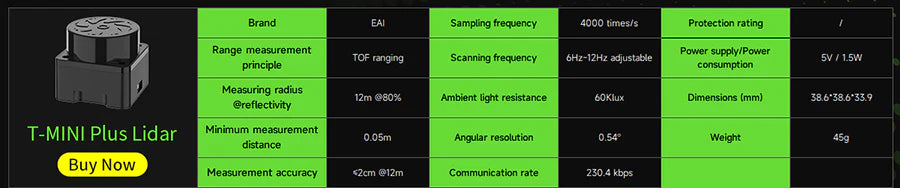
گزینههای اضافی LiDAR در دسترس است اگر به پروفایل حسگری متفاوت از سری RPLIDAR SLAM نیاز دارید.
برای ساختهای جمع و جور، نیازهای فضای اشغال شده و رابط را در کنار مدلهای RPLIDAR مقایسه کنید.

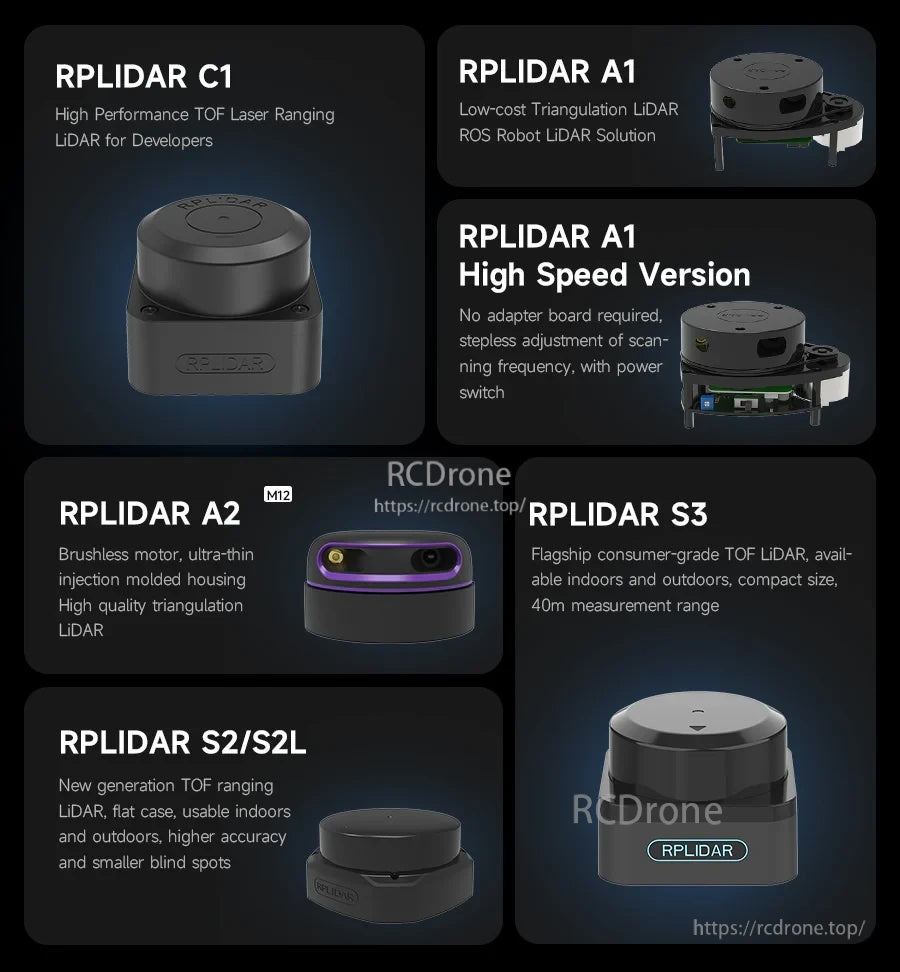
RPLIDAR C1 از اندازهگیری فاصله TOF برای اندازهگیری فاصله پایدار با گزینه بدنه جمع و جور استفاده میکند.

RPLIDAR A1 یک انتخاب مبتنی بر مثلثسازی برای پروژههای یادگیری ROS، نقشهبرداری و ناوبری است.
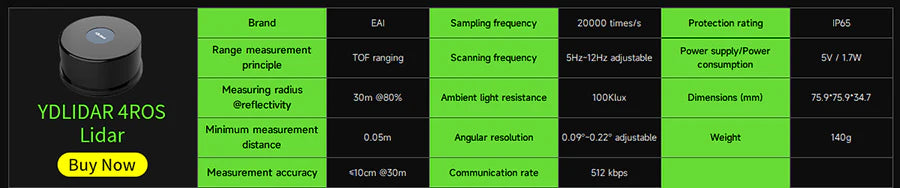
اگر پلتفرم شما به نرخهای بهروزرسانی یا سطوح حفاظت متفاوتی نیاز دارد، قبل از پرداخت، کارتهای حسگر جایگزین را بررسی کنید.

مدلهای S2/S2L گزینههای مبتنی بر TOF هستند که برای نقشهبرداری و ناوبری با عملکرد بالاتر طراحی شدهاند.

نقشهبرداری دستی با تنظیمات سازگار برای جریانهای توسعه SLAM C1 و ROS2 پشتیبانی میشود.

سری SLAM شامل C1، A1/A1 با سرعت بالا، A2، S2/S2L و S3 است تا اصول مختلف اندازهگیری و نیازهای کاربردی را پوشش دهد.
مدلی را که با پروژه شما سازگار است انتخاب کنید—مثلثسازی (A1/A2) یا TOF (C1، S2/S2L، S3)—سپس از طریق UART و ROS ادغام کنید.
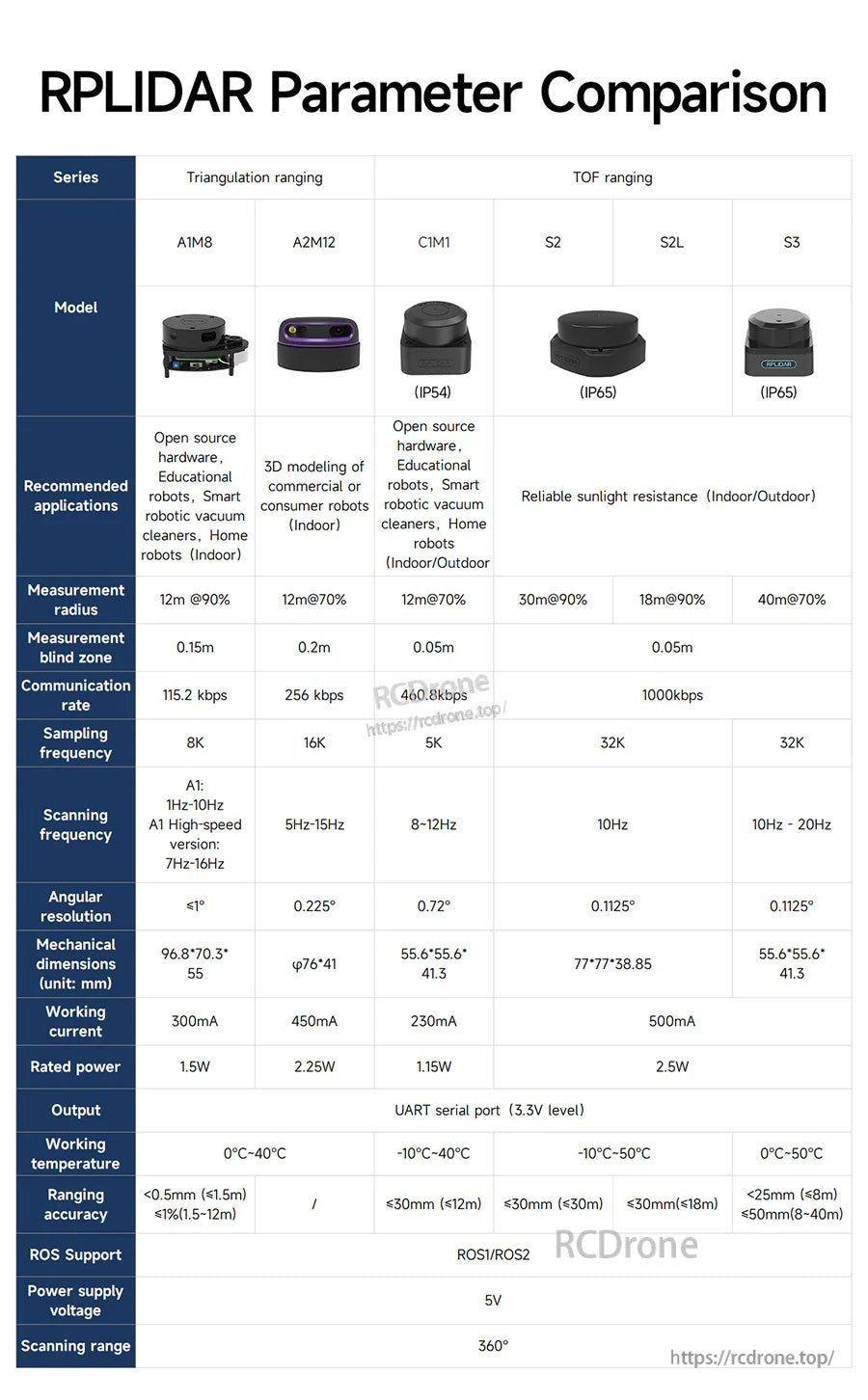
جدول پارامترهای کنار هم به مقایسه نرخ اسکن، دامنه، سرعت رابط و موارد استفاده معمول در سراسر سری کمک میکند.

سنسور را با محیط عملیاتی خود مطابقت دهید—سناریوهای داخلی، خارجی و نور قوی بسته به مدل متفاوت است.
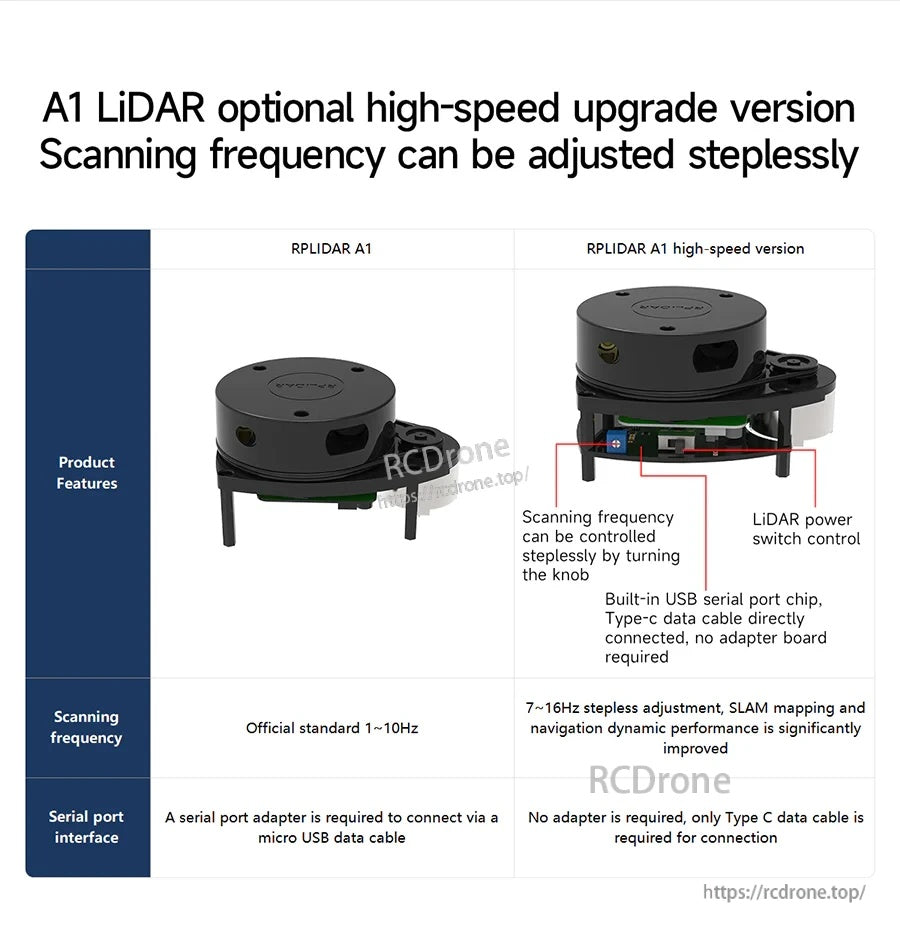
نسخه A1 با سرعت بالا تنظیم فرکانس اسکن بدون پله و یک مسیر اتصال سادهتر Type‑C برای توسعه را اضافه میکند.
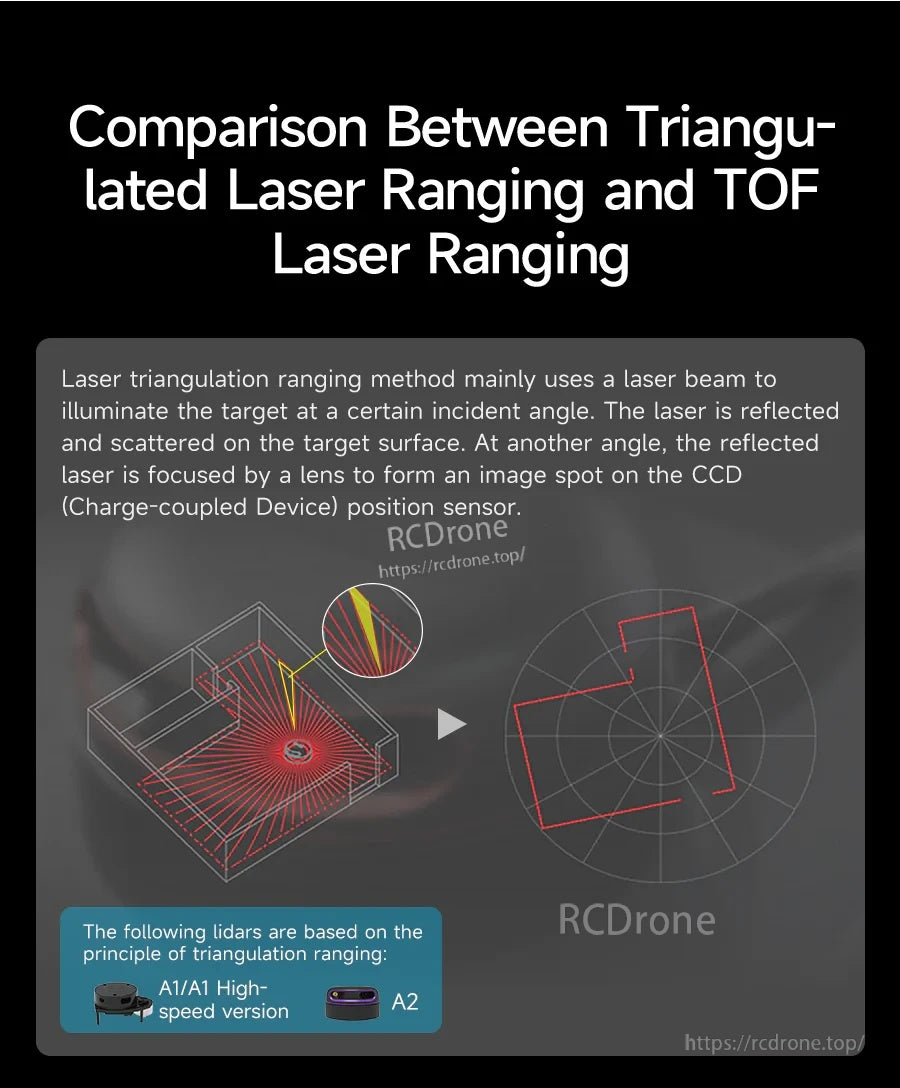
مثلثسازی و اندازهگیری TOF در انواع سطوح و فواصل متفاوت عمل میکنند؛ اصلی را انتخاب کنید که با مورد استفاده شما سازگار باشد.
مدلهای مبتنی بر TOF (C1، S2/S2L، S3) برای عملکرد پایدار در اندازهگیری در فواصل طولانی طراحی شدهاند.

از سری SLAM با پلتفرمهای توسعه مشترک شامل Raspberry Pi، Jetson و استکهای رباتیک مبتنی بر PC استفاده کنید.
پشتیبانی از ROS1 و ROS2 شروع به توسعه نقشهبرداری و ناوبری را با منابع SDK موجود آسان میکند.
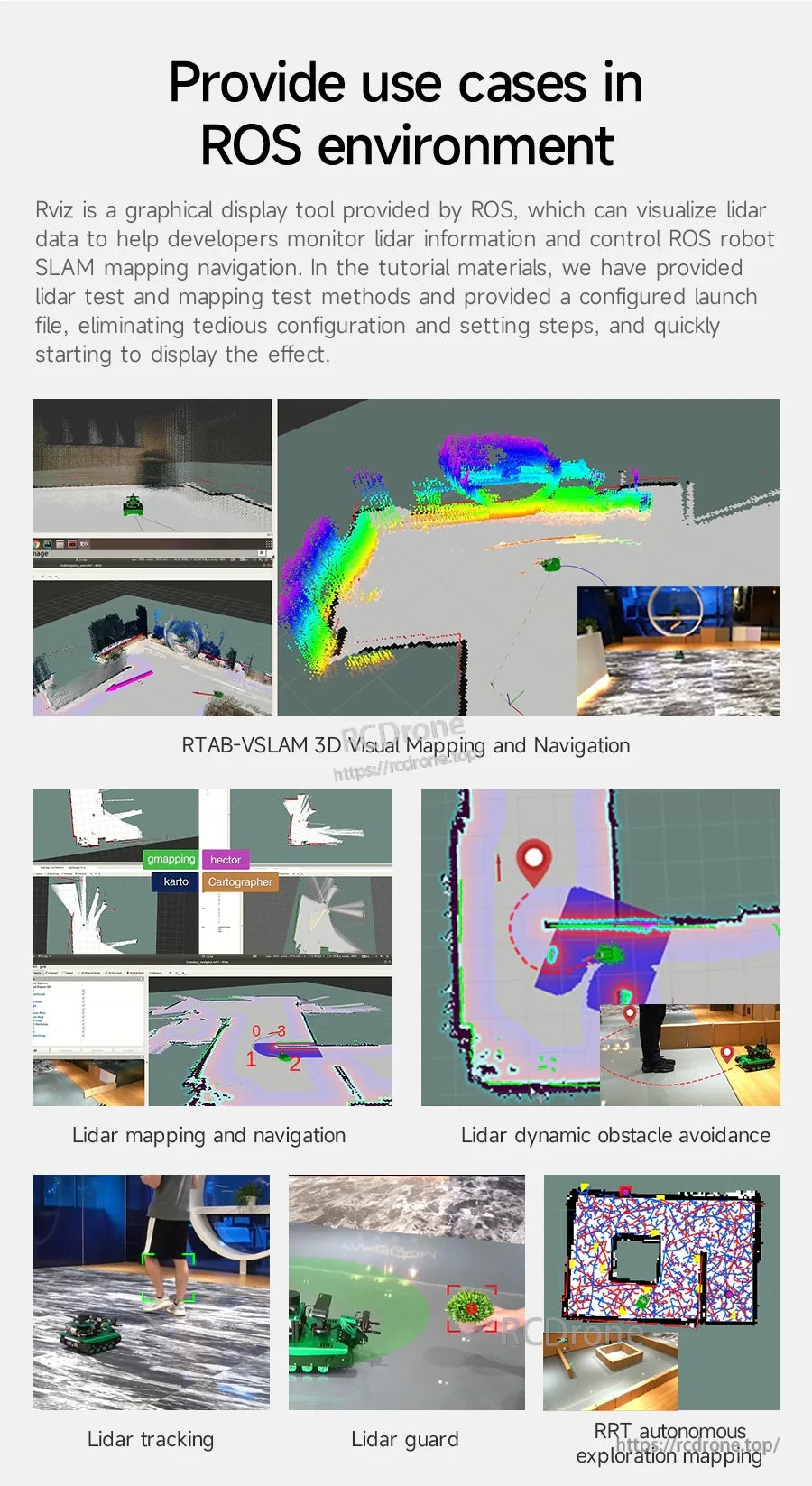
جریانهای کاری معمول ROS شامل تجسم نقشهبرداری RViz، ناوبری، اجتناب از موانع و برنامههای کاربردی به سبک ردیابی است.
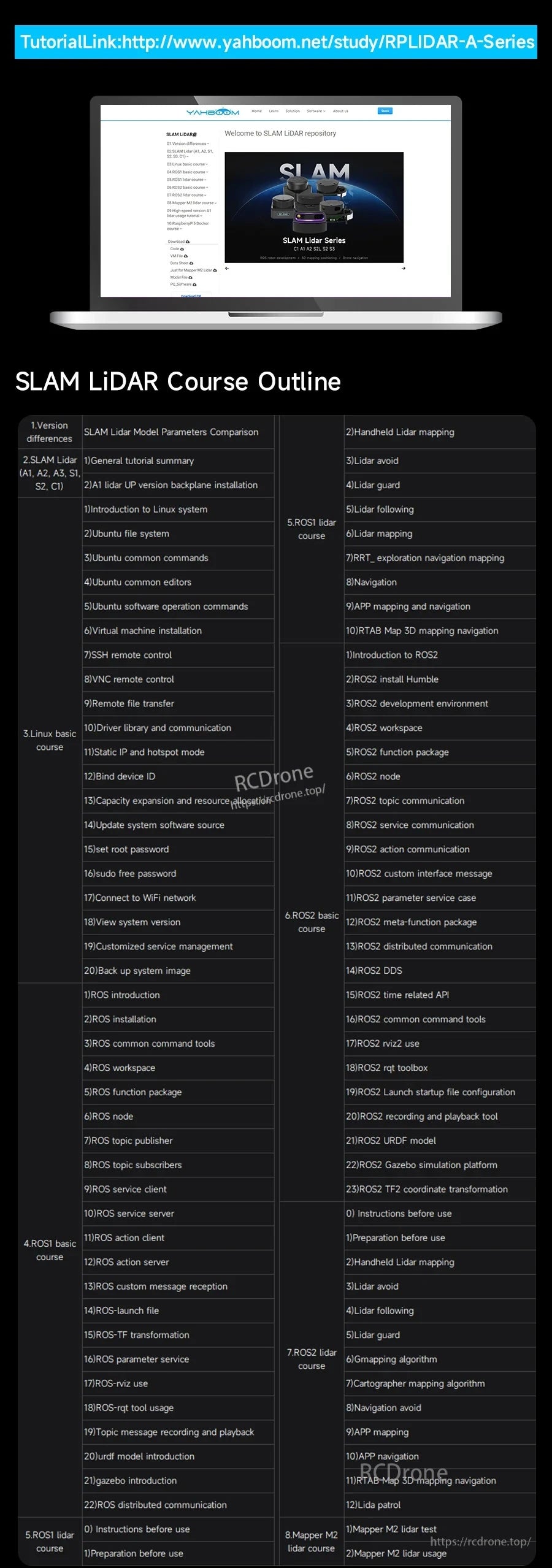
یک لینک آموزشی و طرح دوره SLAM LiDAR بهطور دقیق برای پشتیبانی از تنظیمات نقشهبرداری و ناوبری ROS1/ROS2 ارائه شده است.
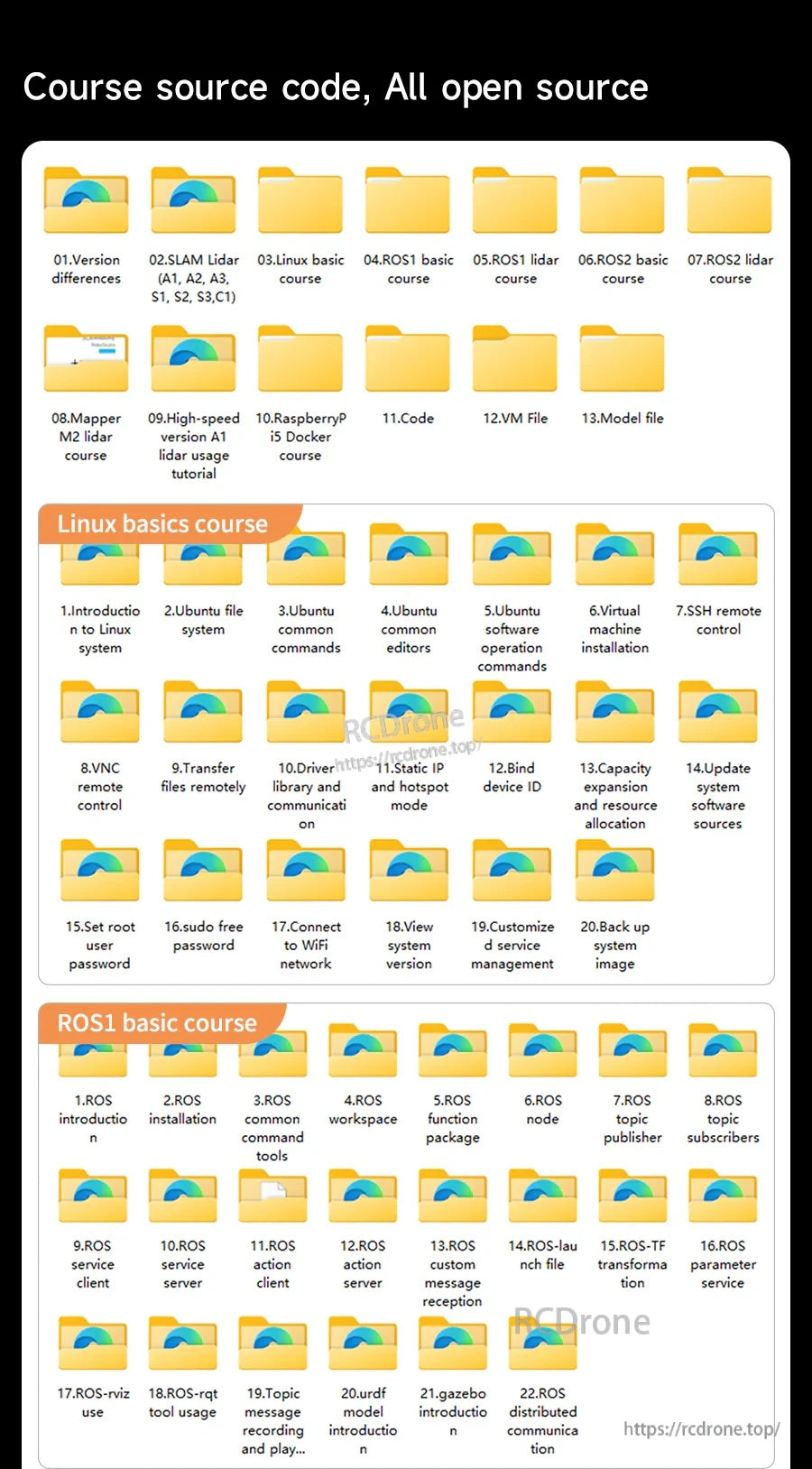
فایلهای دوره متنباز به ماژولهای SLAM LiDAR، مبانی لینوکس و lidar ROS1/ROS2 برای پروژههای نقشهبرداری و ناوبری سازماندهی شدهاند.
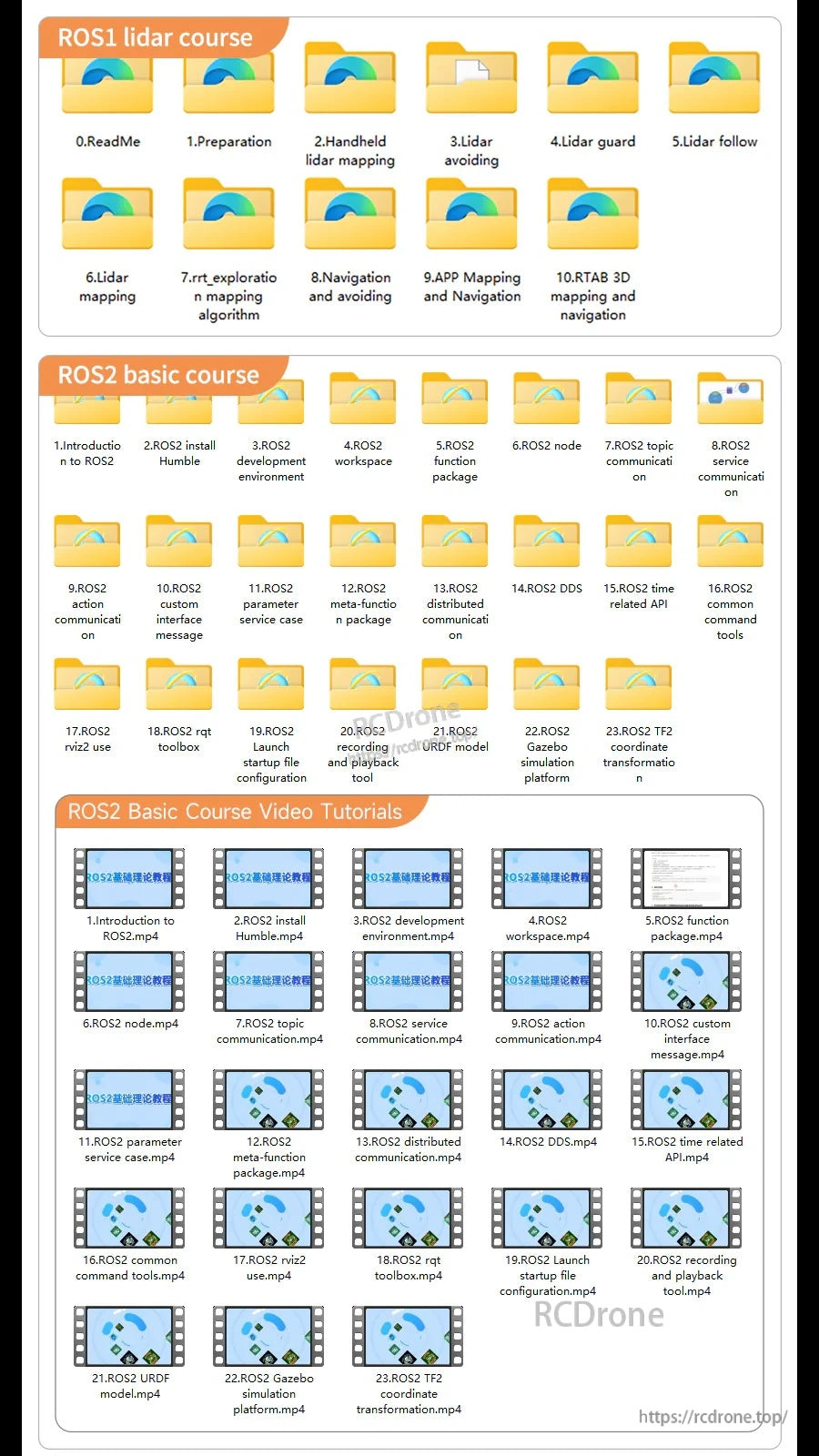
ماژولهای آموزشی ROS1 و ROS2 شامل نقشهبرداری LiDAR، ناوبری، SLAM و ویدیوهای آموزشی مرتبط برای راهاندازی و توسعه فرآیندها هستند.
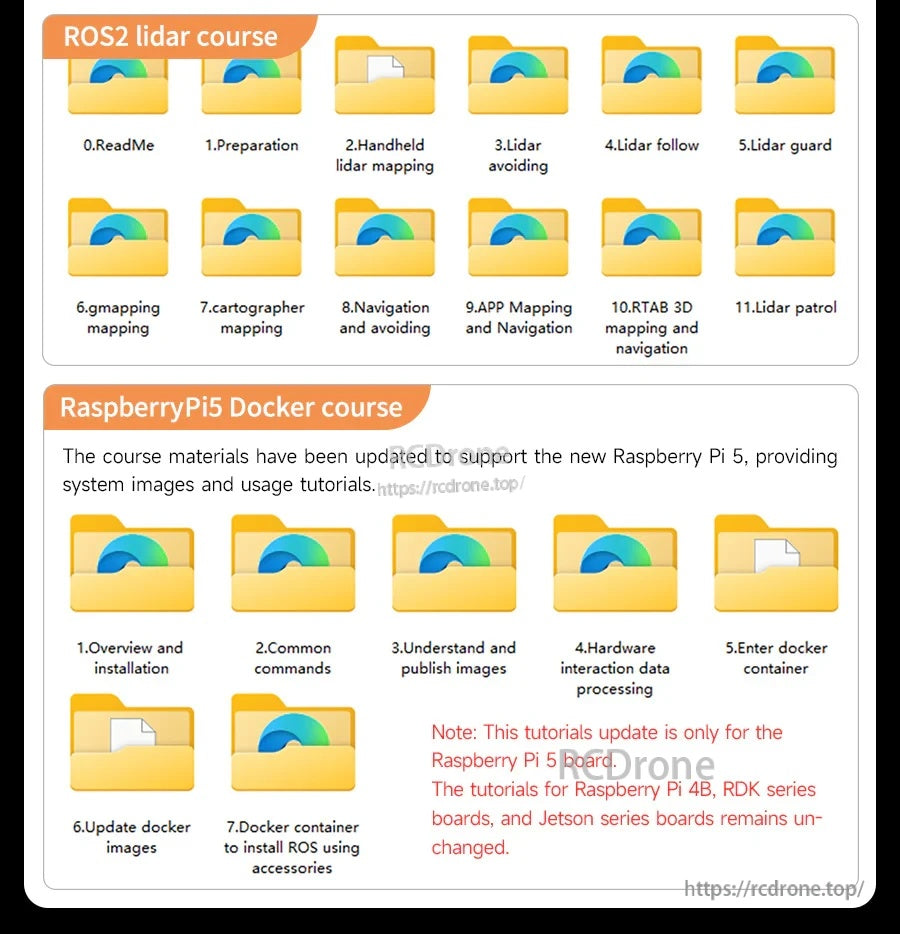
مواد دوره Docker LiDAR و Raspberry Pi 5 شامل ROS2 به صورت ماژولهای درسی مرحله به مرحله برای راهاندازی، نقشهبرداری و ناوبری سازماندهی شدهاند.
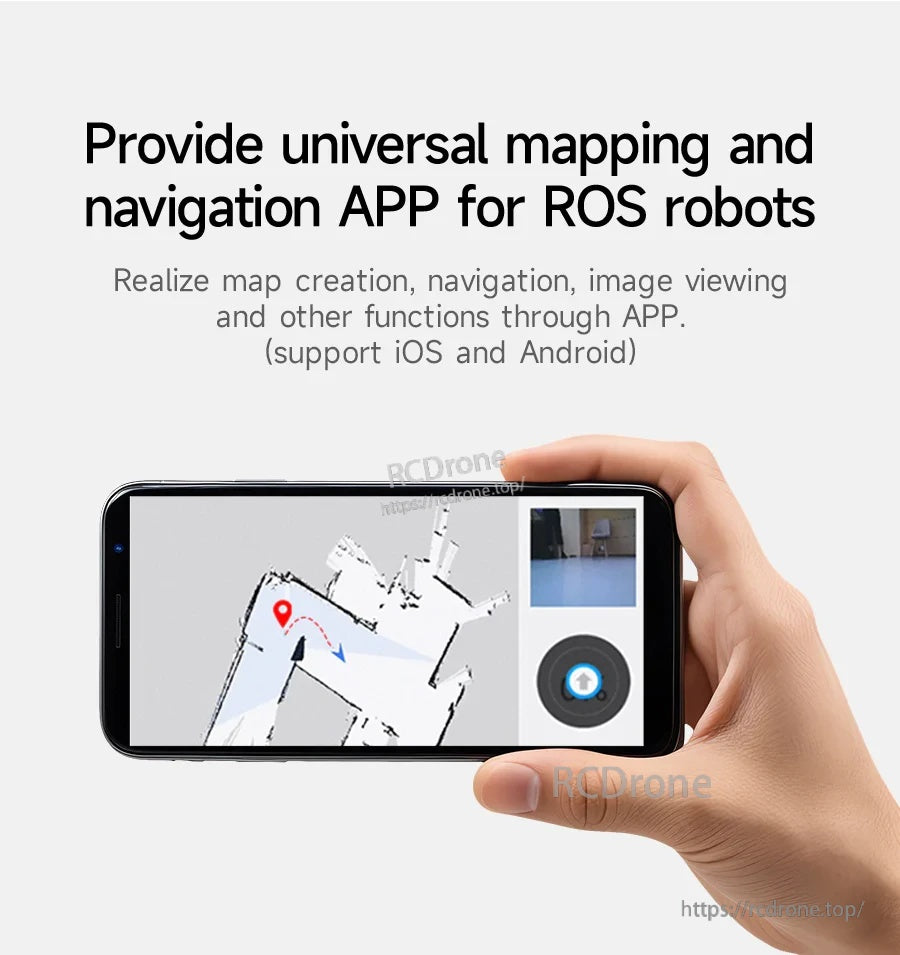
یک اپلیکیشن جهانی نقشهبرداری و ناوبری ROS از ایجاد نقشه، ناوبری و مشاهده تصاویر در iOS و Android پشتیبانی میکند.
مستندات رسمی RPLIDAR و برگههای داده دستورالعملهای راهاندازی، جزئیات پروتکل و راهنماییهای کاربردی برای نقشهبرداری و ناوبری SLAM را ارائه میدهند.
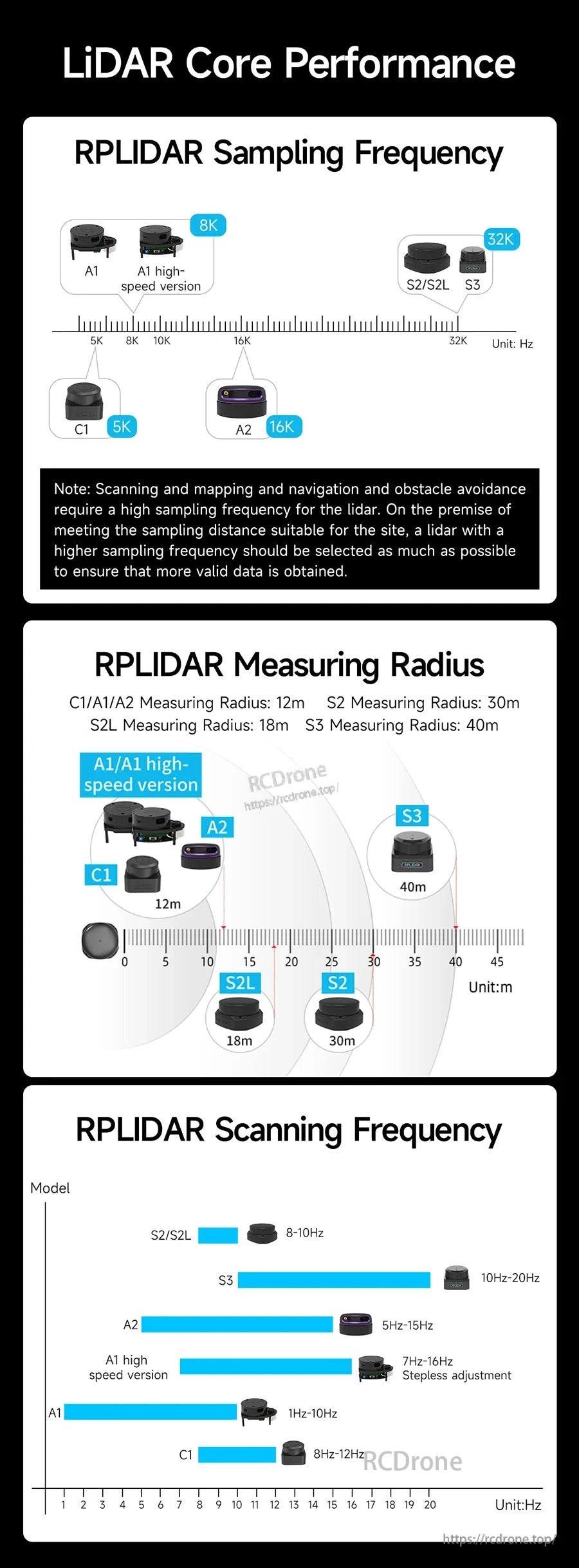
معیارهای عملکرد اصلی فرکانس نمونهبرداری، شعاع اندازهگیری و نرخ اسکن را در مدلهای RPLIDAR A1/A2/S2/S3/C1 مقایسه میکنند.

واحدهای سری SLAM Slamtec RPLIDAR از یک موتور بدون برس با طراحی انتقال غیرتماسی استفاده میکنند تا به کاهش نویز عملیاتی کمک کنند.

اسکنر لیزری Slamtec RPLIDAR با ۳۶۰° اسکن همهجانبه به ساخت نقشههای کانتور از محیط اطراف برای ناوبری کمک میکند.
اتصال USB به صورت Plug-and-play به RPLIDAR اجازه میدهد که به طور مستقیم بدون نیاز به کدنویسی اجرا شود و از رابطهای سری/USB، ابزارهای SDK متنباز و ادغام ROS پشتیبانی میکند.
سری SLAM Slamtec RPLIDAR از یک لیزر مادون قرمز با توان پایین استفاده میکند که برای رعایت استانداردهای ایمنی لیزر کلاس ۱ طراحی شده است و میتوان آن را در اطراف افراد و حیوانات خانگی استفاده کرد.