









ماژول مفصل ربات کوچک SteadyWin GIM3510-8، گیربکس سیارهای 8:1، درایور CAN، انکودر دوگانه، 24 ولت 60 وات
ماژول مفصل ربات کوچک SteadyWin GIM3510-8، گیربکس سیارهای 8:1، درایور CAN، انکودر دوگانه، 24 ولت 60 وات
SteadyWin
در دسترس بودن پیکاپ بارگیری نشد
بررسی
ماژول مفصل ربات کوچک SteadyWin GIM3510-8 یک عملگر مفصل رباتیک یکپارچه است که موتور آلوها، کاهنده دنده سیارهای 8:1، درایور ارتباطی داخلی و دو انکودر را در یک بسته استوانهای فشرده ترکیب میکند. با منبع تغذیه نامی 24 ولت (محدوده وسیع 12–40 ولت یا 12–48 ولت بسته به برد درایور)، سرعت خروجی بالا تا 564.6 دور در دقیقه پس از کاهش و ارتباط CAN bus، برای رباتهای انساننما چابک، بازوهای رباتیک، پلتفرمهای متحرک و سایر سیستمهای چندمحوره که نیاز به کنترل حرکت دقیق و حلقه بسته دارند، طراحی شده است.
ویژگیهای کلیدی
- کاهش دنده سیارهای با سرعت بالا: جعبه دنده سیارهای 8:1 با سرعت خروجی نامی 535.5 دور در دقیقه و حداکثر 564.6 دور در دقیقه (GDZ34)، مناسب برای مفاصل با حرکت سریع.
- محدوده ولتاژ وسیع: عملکرد نامی 24 ولت با محدوده ورودی 12–40 ولت (GDZ34) یا 12–48 ولت (GDS34) برای طراحی سیستم قدرت انعطافپذیر.
- خروجی گشتاور کارآمد: ثابت گشتاور تا 0.32 N.m/A با گشتاور نامی تا 1.68 N.m و گشتاور اوج تا 6.02 N.m، که انتقال قدرت کارآمدی را برای مفاصل رباتیک سبک تا متوسط فراهم میکند.
- درایور یکپارچه با باس CAN: برد درایور داخلی (GDS34 یا GDZ34) از ارتباط CAN پشتیبانی میکند که سیمکشی و کنترل شبکهای را ساده میکند.
- بازخورد دوگانه انکودر: انکودر 14 بیتی بر روی درایور و یک انکودر دوم بر روی شفت خروجی برای بازخورد دقیق موقعیت و سرعت.
- ساختار جمع و جور: فقط 46 میلیمتر قطر خارجی با طول کلی از 46.5 میلیمتر (بدون درایور) تا 51.5 میلیمتر (با درایور)، که چیدمانهای چند مفصلی متراکم را امکانپذیر میسازد.
- دوام محیطی: درجه حفاظت IP54، دمای عملیاتی از -20 درجه سانتیگراد تا +80 درجه سانتیگراد، و سطح نویز زیر 60 دسیبل.
- عملکردهای حفاظتی: حفاظت در برابر دماهای بالا، ولتاژ بالا و بار اضافی به حفظ عملکرد ایمن و قابل اعتماد در سیستمهای رباتیک با کارکرد مداوم کمک میکند.
- استحکام مکانیکی: پشتیبانی از بار محوری تا 75 نیوتن و بار شعاعی 300 نیوتن بر روی شفت خروجی، با بازگشت دنده 15 دقیقه قوسی.
- گزینه ترمز سفارشی: پشتیبانی از ادغام ترمز سفارشی برای مفاصل که نیاز به گشتاور نگهدارنده در حالت بدون برق دارند.
برای پشتیبانی فنی، سفارشیسازی یا سوالات ادغام در مورد ماژول مفصل ربات کوچک GIM3510-8، لطفاً با https://rcdrone.top/ تماس بگیرید یا به [email protected] ایمیل بزنید.
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلت خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
مشخصات
| پارامتر | واحد | GIM3510-8 + GDS34 (SDC101) | GIM3510-8 + GDZ34 |
|---|---|---|---|
| مدل | - | GIM3510-8 | GIM3510-8 |
| مدل برد درایور | - | GDS34 (SDC101) | GDZ34 |
| ولتاژ نامی | V | 24 | 24 |
| دامنه ولتاژ | V | 12–48 | 12–40 |
| توان نامی | W | 98 | 60 |
| گشتاور نامی | N.m | 1.68 | 1.00 |
| گشتاور اوج | N.m | 3.41 | 6.02 |
| سرعت نامی پس از کاهش | دور در دقیقه | 430 | 535.5 |
| حداکثر سرعت پس از کاهش | دور در دقیقه | 529 | 564.6 |
| جریان نامی | A | 4.1 | 2.5 |
| جریان اوج | A | 8.30 | 25.30 |
| مقاومت فاز | اهم | 0.48 | 0.48 |
| اندوکتانس فاز | میلیهنری | 0.31 | 0.31 |
| ثابت سرعت | دور در دقیقه/ولت | 22.04 | 23.53 |
| ثابت گشتاور | N.m/A | 0.44 | 0. | 32
| تعداد جفت قطبها | جفتها | 7 | 7 |
| نسبت دنده | - | 8:1 | 8:1 |
| نوع دنده | - | سیارهای | سیارهای |
| جنس دنده کاهنده | - | آلومینیوم | آلومینیوم |
| بازی دنده کاهنده | دقیقه قوس | 15 | 15 |
| وزن موتور بدون درایور | گرم | 247.6 | 247.6 |
| وزن موتور با درایور | گرم | 259.6 | 259.6 |
| اندازه بدون درایور (قطر x طول) | میلیمتر | Ø46 x 46.5 | Ø46 x 46.5 |
| اندازه با درایور (قطر x طول) | میلیمتر | Ø46 x 51.۵ | Ø۴۶ x ۵۱.5 |
| حداکثر بار محوری | N | 75 | 75 |
| حداکثر بار شعاعی | N | 300 | 300 |
| صدا | dB | <60 | <60 |
| ارتباط | - | CAN | CAN |
| انکودر دوم بر روی شفت خروجی | - | بله | بله |
| درجه حفاظت | - | IP54 | IP54 |
| دمای عملیاتی | °C | -20 تا +80 | -20 تا +80 |
| رزولوشن انکودر (انکودر درایور) | بیت | 14 | 14 |
| پشتیبانی از انکودر جداگانه | - | خیر | خیر |
| پشتیبانی ترمز سفارشی | - | بله | بله |
راهنماها
جزئیات

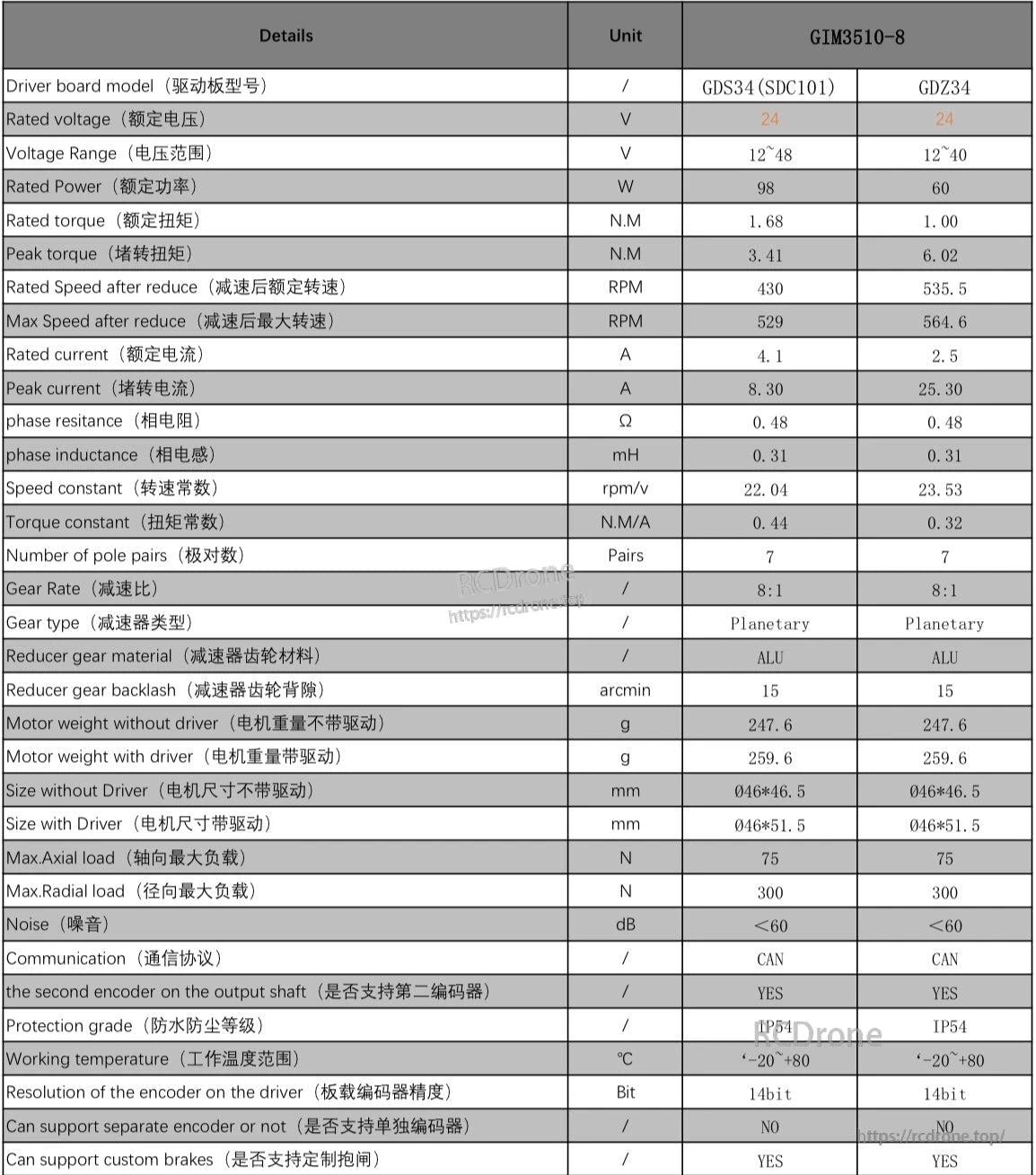
مشخصات مفصل ربات GIM3510-8 را با بردهای درایور GDS34 و GDZ34 مقایسه کنید. معیارهای کلیدی شامل ولتاژ، توان، گشتاور، سرعت، جریان، وزن، اندازه، ظرفیت بار، نویز، ارتباط، انکودر، درجه حفاظت، دامنه دما و پشتیبانی از ترمز سفارشی است.
Related Collections









