کیت موتور سروو بازوی ربات SO-ARM101 Pro برای LeRobot (بدون قطعات چاپ سهبعدی) – متنباز، ۶ محور، UART، انکودر ۱۲ بیتی
کیت موتور سروو بازوی ربات SO-ARM101 Pro برای LeRobot (بدون قطعات چاپ سهبعدی) – متنباز، ۶ محور، UART، انکودر ۱۲ بیتی
Seeed Studio
در دسترس بودن پیکاپ بارگیری نشد
مرور کلی
SO-ARM101 یک کیت موتور سروو بازوی رباتیک پرو بهینهسازی شده برای یادگیری تقلیدی و تقویتی با پروژههای LeRobot و Hugging Face است. این کیت منبع باز و کمهزینه شامل موتورهای سروو، بردهای آداپتور و کابلها برای یک تنظیم کامل بازوی رهبر–دنبالکننده است. این کیت برای DIY دوستانه است و برای پروتوتایپسازی سریع با منابع فراوان طراحی شده است. مهم: کیت موتور شامل قطعات چاپ شده سهبعدی نیست؛ در صورت نیاز، اسکلت چاپ شده سهبعدی را نیز سفارش دهید. Seeed Studio سختافزار لازم برای LeRobot را فراهم میکند.
ویژگیهای کلیدی
چه چیزی در SO-ARM101 جدید است
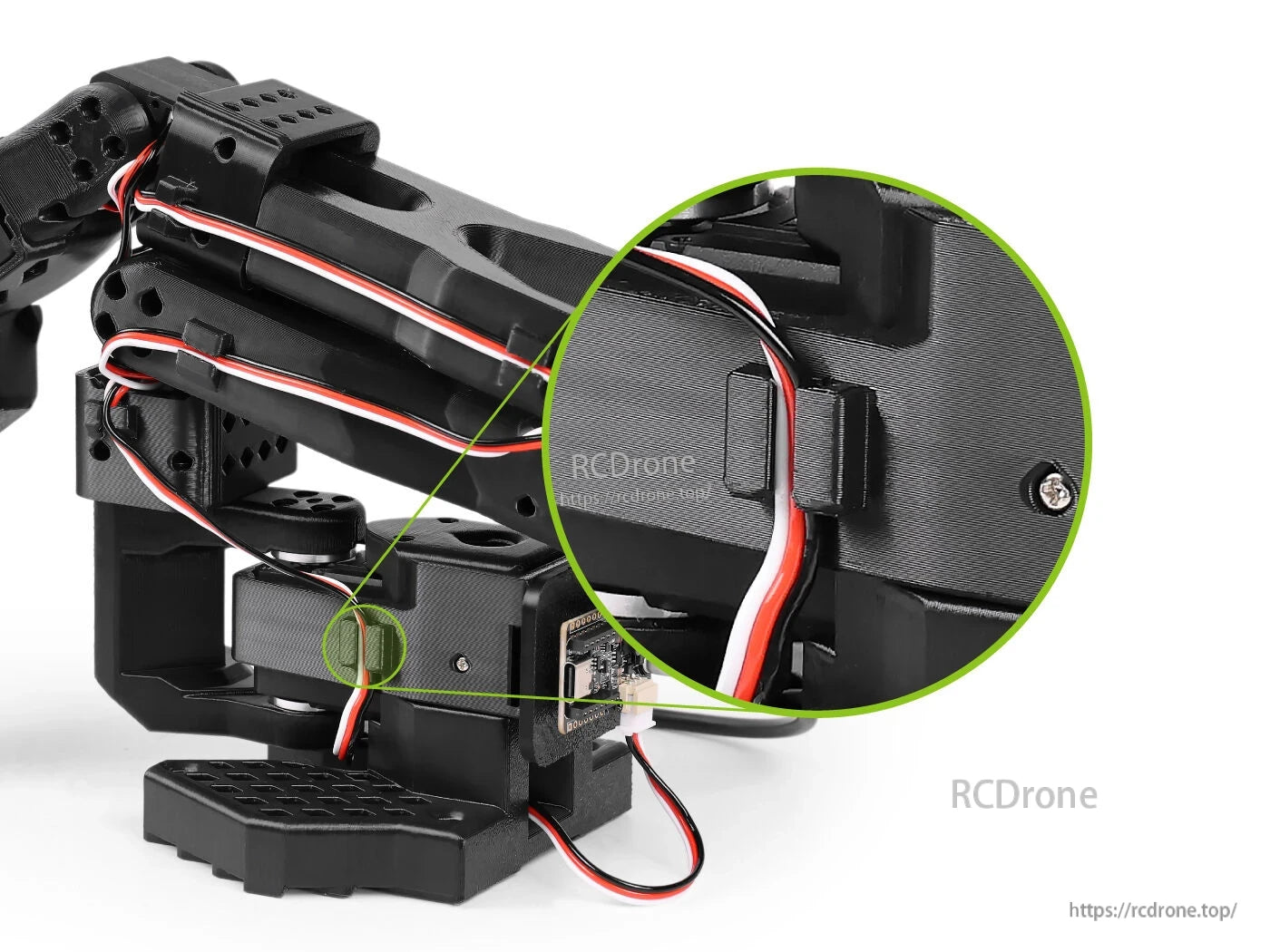
- بهینهسازی سیمکشی: قطع شدنهایی که قبلاً در مفصل 3 مشاهده میشد را کاهش میدهد و محدودیتهای دامنه حرکت را حذف میکند.
- نسبت دندههای بازوی رهبر بهینهسازی شده: عملکرد بهبود یافته بدون جعبه دندههای خارجی.
- عملکرد جدید: بازوی رهبر میتواند به صورت زمان واقعی از بازوی دنبالکننده پیروی کند تا از سیاستهای RL و مداخله انسانی پشتیبانی کند. html
نکات برجسته سری SO-ARM10x
- راهحل منبع باز و کمهزینه از TheRobotStudio.
- ادغام با پلتفرم LeRobot (دادههای مبتنی بر PyTorch، مدلها، ابزارها برای یادگیری تقلیدی و یادگیری تقویتی).
- منابع جامع: راهنماهای مونتاژ، کالیبراسیون، تست، جمعآوری داده، آموزش و استقرار.
- سازگار با Nvidia reComputer Mini J4012 Orin NX 16 GB.
- بازوهای رباتیک 6 محوره (رهبر و پیرو) که در مواد کیت نشان داده شدهاند.
مشخصات
| نوع | کیت بازوی SO-ARM101 Pro |
| موتورهای بازوی رهبر (7.4V) | نسبت دنده 1× 1:345 (مفصل شماره 2)؛ 2× 1:191 (مفصل شماره 1 و شماره 3)؛ 3× 1:147 (مفصل شماره 4، شماره 5 و گیره شماره 6) |
| بازوی پیرو | همانند SO-ARM100 Pro |
| منبع تغذیه (DC 5.5mm*2. 1mm) | 12V2A برای بازوی دنبالکننده؛ 5V4A برای بازوی پیشرو |
| حسگر زاویه | انکودر مغناطیسی 12 بیتی |
| دمای عملیاتی توصیه شده | 0℃~40℃ |
| روش ارتباطی | UART |
| روش کنترل | PC |
مقایسه
|
SO-ARM10x هزینه پایین کیت بازوی AI و کیت بازوی پرو |
||||
|
نوع |
SO-ARM100 |
SO-ARM101 |
||
|
کیت بازو |
کیت بازو پرو |
کیف بازو |
کیف بازو پرو |
|
|
بازوی پیشرو |
12x (7.4V) موتورها با نسبت دنده 1:345 برای تمام مفاصل |
12x (12V) موتورها با نسبت دنده 1:345 برای تمام مفاصل |
1x (7.4V) موتور با نسبت دنده 1:345 برای مفصل شماره 2 |
|
|
2x (7.4V) موتورها با نسبت دنده 1:191 برای مفاصل شماره 1 و شماره 3 |
||||
|
3x (7.4V) موتورها با نسبت دنده 1:147 برای مفاصل شماره 4، شماره 5 و گیره شماره 6 |
||||
|
بازوی دنبالکننده |
همانند SO-ARM100 |
همانند SO-ARM100 Pro |
||
|
منبع تغذیه |
5.5mm*2.1mm DC 5V4A |
5.5mm*2.1mm DC 12V2A |
5.5mm*2.1mm DC 5V4A |
5.5mm*2.1mm DC 12V2A برای بازوی دنبالکننده |
|
5.5mm*2.1mm DC 5V4A برای Leader Arm |
||||
|
حسگر زاویه |
انکودر مغناطیسی 12 بیتی |
|||
|
دمای عملیاتی توصیه شده محدوده دما |
0℃~40℃ |
|||
|
روش ارتباطی |
UART |
|||
|
روش کنترل |
PC |
|||
محتویات شامل
- موتور سرو 7.4v STS3215 نسبت دنده 1:345 ×1
- موتور سرو 7.4v STS3215 نسبت دنده 1:191 ×2
- 7.4v موتور سروو STS3215 نسبت دنده 1:145 ×3
- موتور سروو 12v STS3215 نسبت دنده 1:345 ×6
- برد آداپتور سروو برای Seeed Studio XIAO ×2
- پیچ ×8
- سکرو ×8
- کابل منبع تغذیه 5V (چند سر) × 1
- کابل منبع تغذیه 12V (چند سر) ×1
- کابل USB-C ×2
- کابل DC Power Pigtail ×2
کاربردها
- یادگیری تقلیدی و یادگیری تقویتی با LeRobot: خطوط لوله انتها به انتها برای جمعآوری دادهها، آموزش، شبیهسازی و استقرار.
- استقرار Nvidia Jetson در لبه: آموزش کارآمد وظایف سفارشی گرفتن و قرار دادن با reComputer J4012 Orin NX 16 GB.
جزئیات

کیت بازوی رباتیک 6 محوره با سختافزار متن باز، سازگار با reComputer Mini J4012 Orin NX 16GB.از LeRobot در Hugging Face برای منابع جامعه و یادگیری تقویتی ابتکاری پشتیبانی میکند و هماهنگی کل بدن را امکانپذیر میسازد. جمعآوری دادهها، شبیهسازی و آموزش را تسهیل میکند. کدهای QR دسترسی به GitHub، Wiki و فایلهای چاپ سهبعدی برای اسکلت را فراهم میکنند.

کیت توسعه NVIDIA Jetson Orin NX با رباتهای بازوی reComputer J40 و SO-ARM101، نمایش آمار سیستم و استفاده از GPU بر روی مانیتور.
Related Collections