




ماژول GPS نانو Flywoo GOKU GM10 V3 با قطبنما، GNSS مدل M10050، وزن ۲.۶ گرم، ابعاد ۱۲x۱۷x۵ میلیمتر، ۶ پین
ماژول GPS نانو Flywoo GOKU GM10 V3 با قطبنما، GNSS مدل M10050، وزن ۲.۶ گرم، ابعاد ۱۲x۱۷x۵ میلیمتر، ۶ پین
FLYWOO
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
ماژول GPS نانو Flywoo GOKU GM10 Nano V3 یک ماژول GPS نانو با قطبنما است که برای ساختهای سبک FPV/RC طراحی شده است. این ماژول دارای فرم فاکتور نانو به وزن 2.6 گرم، یک کانکتور پد 6 پین و یک کابل پلاگ اند پلی برای نصب بدون لحیمکاری میباشد.
بر اساس اطلاعات ارائه شده، سری GM10 V3 از جدیدترین چیپ GNSS M10050 برای جستجوی سریعتر ماهوارهها نسبت به GM8 V2 قبلی استفاده میکند. برای کمک در راهاندازی یا سوالات مربوط به سازگاری، با [email protected] or تماس بگیرید https://rcdrone.top/.
ویژگیهای کلیدی
- اندازه نانو و وزن سبک: 2.6 گرم
- قطبنمای یکپارچه
- پلاگ اند پلی (بدون نیاز به لحیمکاری)
- کانکتور پد 6 پین
- ماژول GPS. سه ماژول.
یادداشتهای سازگاری
- توجه: چیپ GPS GOKU GM10 V3 در یادداشت ارائه شده به عنوان M1005 اشاره شده است. فقط فریمور Betaflight (BF) 4.3.x میتواند از پروتکل Ublox استفاده کند. BF 4.2.x و قبل از تنها میتوانند از پروتکل NMEA استفاده کنند. یادداشت بیان میکند که هیچ تفاوت عملکردی بین این دو پروتکل وجود ندارد.
- BETAFLIGHT: از فریمور بالای 4.3.0.
- INAV: از آخرین 6.0.0 کانفیگوراتور, و فریمور بالای 5.0.0.
مشخصات
| برند | FLYWOO | ||
| مدل | GM10 NANO V3 GPS با/قطبنما | ||
| ابعاد | 12mm*17mm*5mm | ||
| وزن | 2. | 6g||
| کانکتور | پد 6 پین | ||
| چیپست | M10050 (چیپ نسل دهم) | ||
| فرمت دریافت | GPS، GLONASS، Galileo، BeiDou، QZSS و SBAS | ||
| پروتکل پیشفرض | GPS، Galileo، BeiDou | ||
| فرکانس | GPS L1، GLONASS L1، BeiDou B1، SBAS L1، Galileo E1 | ||
| کانالها | 72 کانال جستجو | ||
| حساسیت (ردیابی) | -162dBm | ||
| حساسیت (دوبارهگیری) | -160dBm | ||
| نرخ پشتیبانی | 4800bps تا 921600bps (پیشفرض 115200bps) | ||
| سطح داده | TTL یا RS-232 (سطح پیشفرض TTL) | ||
| پروتکل داده | BF4.3.X (UBLOX) / BF4.2X (NMEA) | ||
| فرکانس خروجی | 1Hz-10Hz (پیشفرض 10Hz) | ||
| حد عملیاتی (ارتفاع) | حداکثر 50,000 متر | ||
| حد عملیاتی (سرعت) | حداکثر 500 متر بر ثانیه | ||
| حد عملیاتی (شتاب) | کمتر از 4g | ||
| VCC | ولتاژ DC: 3.3-5V | ||
| دمای عملیاتی | -40 °C ~ +85°C | ||
| دمای ذخیرهسازی | -40°C ~ +105°C | ||
| شاخص | LED PPS: قرمز. LED PPS زمانی روشن میشود که GPS ثابت نیست و زمانی خاموش میشود که ثابت است. | ||
| پینهای ماژول (متن) | RX, TX, 3.3-5V، GND | ||
| برچسبهای پد قطبنما/GPS (نقشه) | T، R، G، V، C، D | ||
| برچسبهای پد کنترل پرواز (نقشه) | TX، RX، GND، 5V، SCL، SDA | ||
| برچسب GM10 NANO V3 (قطبنما) (نقشه) | SD-SC-V-G-RX-TX |
راهنمای عملیات
گزینههای جهت قطبنما (نشان داده شده)
- پیشفرض
- CW 0°
- CW 90°
- CW 180°
- CW 270°
- چرخش CW 0°
- چرخش CW 90°
- چرخش CW 180°
- چرخش CW 270°
- سفارشی
تنظیمات GPS Betaflight و حالت نجات GPS (نشان داده شده)
- پورت سری را باز کنید: GPS / نرخ باود 115200.
- کلید GPS را روشن کنید و پروتکل UBLOX/NMEA را تنظیم کنید.
- تنظیم کانال حالت نجات RXLOSS (مثال نشان داده شده: AUX 2 GPS RESCUE, مقدار 2000).
- انتخاب گزینه حالت نجات GPS (مقادیر مثال نشان داده شده): زاویه 32; ارتفاع اولیه (متر) 50; فاصله نزول (متر) 200; حداقل فاصله به خانه (متر) 100; سرعت زمین (متر/ثانیه) 20.00; حداقل گاز 1100; حداکثر گاز 1600; گاز معلق 1280; نرخ صعود (متر/ثانیه) 5.00; نرخ نزول (متر/ثانیه) 1.50; حداقل ماهوارهها 5; حالت ارتفاع حداکثر ارتفاع; بررسیهای صحت فعال.
چه چیزی شامل میشود
- 1x GM10 NANO V3 GPS با قطبنما
- 1x کابل 100mm
- 1x فویل مسی
جزئیات
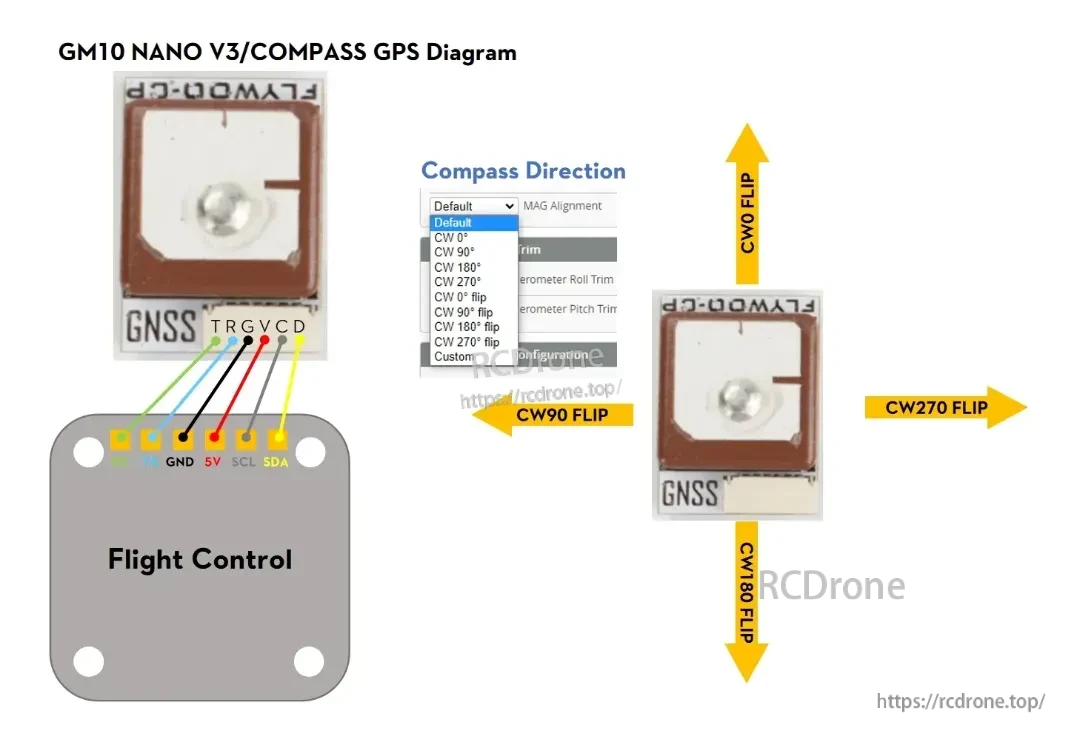
سیمکشی GPS GM10 Nano V3 از TX/RX به همراه 5V و I2C (SCL/SDA) استفاده میکند و گزینههای جهتیابی قطبنما برای جهتگیریهای مختلف ماژول را فراهم میکند.

GPS GM10 Nano V3 Flywoo GOKU به کنترلر پرواز با قدرت 5V و GND به همراه UART TX/RX متصل میشود و گزینههای SDA/SCL برای قطبنما در دسترس است.

GPS GM10 Nano V3 Flywoo GOKU برای جستجوی سریعتر ماهواره طراحی شده و از ردیابی بیش از 30 ماهواره پشتیبانی میکند.

پورت سری GPS را به 115200 baud تنظیم کنید و سوئیچ GPS را با پروتکل UBLOX/NMEA برای تنظیم حالت نجات فعال کنید.

حالت نجات GPS میتواند با اختصاص یک کانال AUX برای GPS RESCUE و تنظیم پارامترهای بازگشت به خانه در Betaflight راهاندازی شود.
Related Collections




