



موتور SteadyWin DD4015، ولتاژ ۲۴ ولت، RS485/CAN، انکودر مطلق ۱۴ بیت، ۰.۲۵ N.M ۱۲۵ دور در دقیقه، وزن ۱۱۴ گرم، دمای کاری -۲۰ تا ۸۰ درجه سانتیگراد
موتور SteadyWin DD4015، ولتاژ ۲۴ ولت، RS485/CAN، انکودر مطلق ۱۴ بیت، ۰.۲۵ N.M ۱۲۵ دور در دقیقه، وزن ۱۱۴ گرم، دمای کاری -۲۰ تا ۸۰ درجه سانتیگراد
SteadyWin
قیمت عادی
$152.00 USD
قیمت عادی
قیمت فروش
$152.00 USD
قیمت واحد
مطابق
Taxes included.
حمل و نقل هنگام تسویه حساب محاسبه می شود.
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
موتور SteadyWin DD4015 یک موتور جمع و جور با ارتباط RS485 / CAN و انکودر مطلق یک دور (14 بیت) است. این موتور برای عملکرد نامی 24 ولت (محدوده 10~28 ولت) مشخص شده و برای عملگرهای رباتیک که نیاز به بازخورد موقعیت حلقه بسته دارند، مناسب است.
ویژگیهای کلیدی
- ارتباط: RS485 / CAN
- انکودر: انکودر مطلق یک دور، با دقت 14 بیت
- گشتاور نامی: 0.25 N.M; گشتاور اوج: 0.35 N.m
- سرعت نامی: 125 دور در دقیقه؛ حداکثر سرعت بدون بار: 1013 دور در دقیقه
مشخصات فنی
| پارامتر | مقدار |
|---|---|
| ولتاژ نامی | 24 ولت |
| محدوده ولتاژ | 10~28 ولت |
| جریان نامی | 1.2 آمپر |
| توان نامی | 28.8 وات |
| گشتاور نامی | 0.25 نیوتن.M |
| سرعت اسمی | 125 دور در دقیقه |
| حداکثر سرعت بدون بار | 1013 دور در دقیقه |
| گشتاور اوج | 0.35 N.m |
| جریان اوج | 1.85A |
| ثابت سرعت | 42.21 دور در دقیقه/ولت |
| ثابت گشتاور | 0.17N.M/A |
| تعداد جفت قطبها | 11 جفت |
| مقاومت فاز | 12.57Ω |
| اندوکتانس فاز | 2.48Mh |
| ارتباطات | RS485 / CAN |
| نوع انکودر | مطلق یکچرخشی |
| وضوح | 14 بیت |
| وزن موتور | 114 گرم |
| دمای کاری | -20~80℃ |
مکانیکی / نصب (از روی نقشه)
- علامت مدل: DD4015
- قطر خارجی: Ø40 ±0.1
- طول کلی: 33 ±0.1
- طول بخشها: 12.4 و 20.1
- قطر شفت: Ø5
- الگوی سمت جلو: Ø20; 4-M3 (عمق ▽3); Ø13.6 (+0.05/0) (عمق ▽2); Ø12.6 (+0.1/0) (عمق ▽12)
- الگوی سمت عقب: Ø33; 4-M3 (عمق ▽4.5)
- کانکتور: SH1.0-8PIN
- SH1.0-8PIN سیگنالها: 485_A، 485_B، CAN_H، CAN_L، GND، GND، VCC، VCC
سناریوهای کاربردی
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
اسناد
برای کمک در زمینه سیمکشی، ادغام یا سفارش، با [email protected] or تماس بگیرید https://rcdrone.top/.
جزئیات
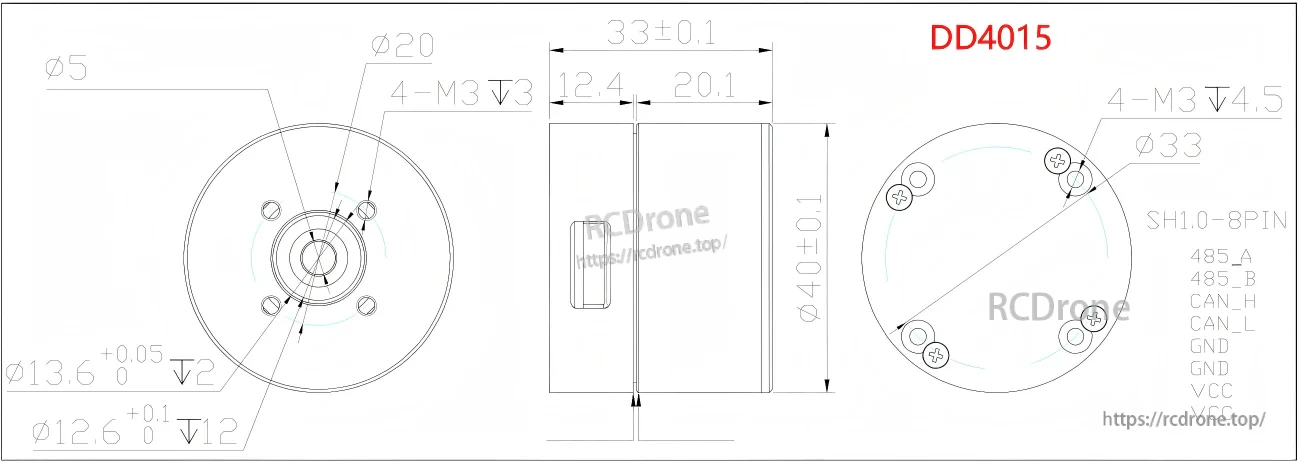
ابعاد مکانیکی و الگوهای سوراخهای نصب برای DD4015، به علاوه پیناوت کانکتور 8 پین SH1.0 برای سیمکشی RS485 و CAN.
Related Collections



