




موتور SteadyWin GB3510، ولتاژ ۱۲ ولت، گشتاور ۰.۱۱ نیوتنمتر، ۳۶۳ دور در دقیقه، نوع انکودر AS5048A/AS5600، سازگار با ۱۲/۱۴ بیت
موتور SteadyWin GB3510، ولتاژ ۱۲ ولت، گشتاور ۰.۱۱ نیوتنمتر، ۳۶۳ دور در دقیقه، نوع انکودر AS5048A/AS5600، سازگار با ۱۲/۱۴ بیت
SteadyWin
قیمت عادی
$33.00 USD
قیمت عادی
قیمت فروش
$33.00 USD
قیمت واحد
مطابق
Taxes included.
حمل و نقل هنگام تسویه حساب محاسبه می شود.
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
موتور SteadyWin GB3510 یک موتور جمع و جور است که برای کار با ولتاژ 12V طراحی شده و برای استفاده در رباتیک و کنترل حرکت مناسب است. این موتور از گزینههای انکودر AS5048A/AS5600 پشتیبانی میکند و گفته میشود که با انکودرهای 12 بیتی و 14 بیتی سازگار است.
ویژگیهای کلیدی
- مدل: GB3510
- نوع انکودر: AS5048A / AS5600
- سازگار با انکودرهای 12 بیتی و 14 بیتی
- سازگار با حلقه لغزش؛ گفته میشود که به طور گستردهای در گیمبالها و پادها استفاده میشود و در سرعتهای پایین پایدار است
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
مشخصات
| مدل | GB3510 |
| ولتاژ نامی | 12V |
| گشتاور نامی | 0.۱۱ N·m |
| سرعت اسمی | ۳۶۳ دور در دقیقه |
| حداکثر سرعت | ۹۶۵ دور در دقیقه |
| جریان اسمی | ۰.۵۳ A |
| گشتاور توقف | ۰.۱۶ N·m |
| جریان توقف | ۰.۸ A |
| مقاومت فاز | ۸.۸ Ω |
| تعداد دورهای سیمپیچ موتور | ۴۰T |
| اندوکتانس فاز | ۳.۹۵Mh |
| ثابت سرعت | ۴۵ دور در دقیقه/ولت |
| ثابت گشتاور | ۰.۲N.M/A |
| اینرسی روتور | 81 گرم سانتیمتر مربع |
| تعداد جفت قطبها | 11 جفت |
| وزن موتور بدون انکودر | 76 گرم |
| وزن موتور با انکودر | 89 گرم |
| دمای کاری | 20~80 °C |
| حداکثر دمای دیمگنتیزه | 120 °C |
| نوع انکودر | AS5048A/AS5600 |
یادداشتهای نقشه مکانیکی (از دیاگرام)
- پیکربندیهای نشان داده شده: با محفظه انکودر / بدون محفظه انکودر
- یادداشتهای الگوی سوراخ نشان داده شده: 4-M3، 3-M2، 4-M2، 4-M2.5
- قطرهای نشان داده شده: φ25، φ30، φ40±0.05، φ20، φ12.6، φ33.5، φ16.6، φ38±0.05
- ابعاد خطی نشان داده شده: 25±0.2، 20±0.2، 19، 20.5، 16، 1، 0.5
راهنماها / فایلهای CAD
برای سوالات مربوط به ادغام (انتخاب انکودر، سیمکشی یا تناسب مکانیکی)، با پشتیبانی تماس بگیرید در [email protected] or بازدید کنید https://rcdrone.top/.
جزئیات
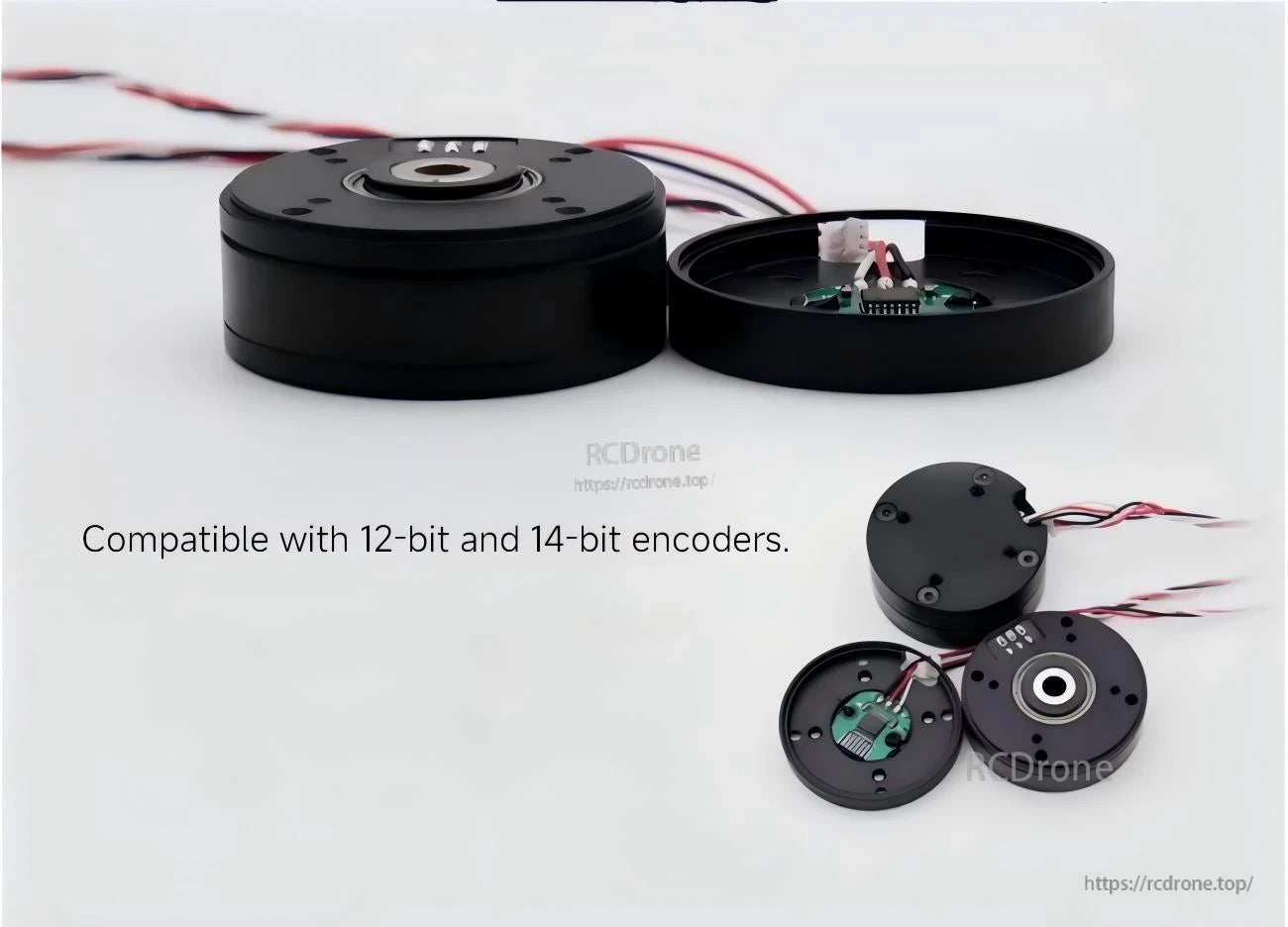
گزینههای انکودر AS5048A یا AS5600 را با سازگاری 12 بیتی/14 بیتی برای کنترل دقیق در سرعتهای پایین در رباتیک انتخاب کنید.

یک فرم فاکتور سازگار با حلقه لغزشی از عملکرد پایدار در سرعتهای پایین برای گیمبالها، پادها و ساختهای کنترل حرکت پشتیبانی میکند.

Related Collections




