کیت پهپاد DIY STM32 - پهپاد پیشرفته برنامهپذیر متنباز با زبان C برای آموزش، تحقیق و توسعه و مسابقات
کیت پهپاد DIY STM32 - پهپاد پیشرفته برنامهپذیر متنباز با زبان C برای آموزش، تحقیق و توسعه و مسابقات
RCDrone
در دسترس بودن پیکاپ بارگیری نشد
مروری بر محصول
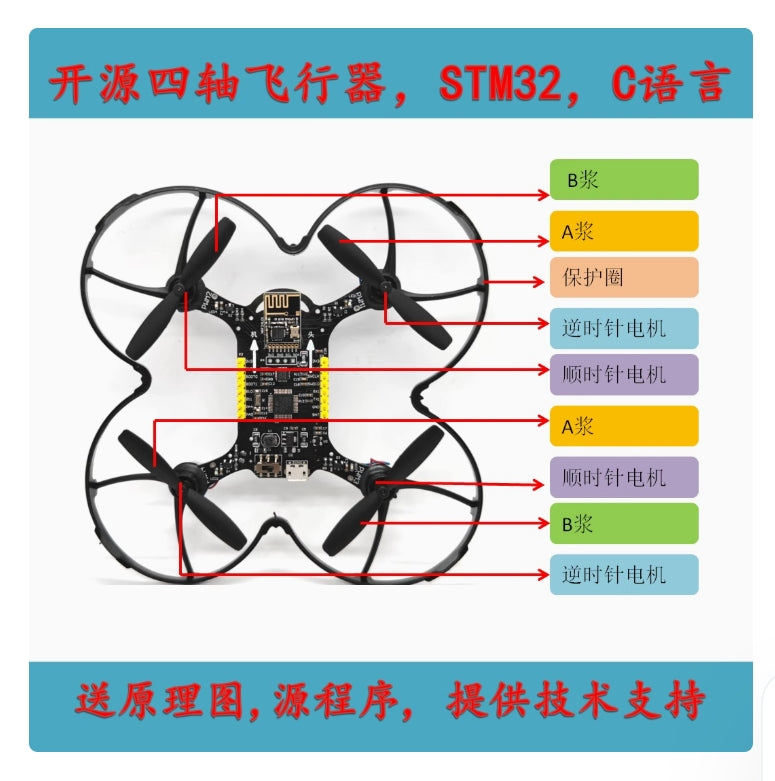
کیت پهپاد DIY STM32 یک پلتفرم جامع متن باز است که برای دانشآموزان، علاقهمندان و توسعهدهندگان طراحی شده است تا سیستمهای پرواز کوادکوپتر را بررسی کنند. این کیت که توسط میکروکنترلر STM32F103C8T6 تغذیه میشود، از برنامهنویسی زبان C و الگوریتمهای پیشرفته کنترل پرواز پشتیبانی میکند و آن را به ابزاری عالی برای یادگیری، تحقیق و توسعه، و مسابقات تبدیل میکند. با سختافزار قوی، طراحی ماژولار و منابع توسعه جامع، این کیت برای تسلط بر فناوری پهپاد و سیستمهای تعبیهشده ایدهآل است.
ویژگیهای کلیدی
- قابل برنامهریزی و متن باز: کاملاً قابل سفارشیسازی با استفاده از زبان C و کتابخانههای استاندارد STM32، با یادداشتهای دقیق برای سهولت یادگیری.
-
سختافزار با عملکرد بالا:
- میکروکنترلر STM32F103C8T6: 72MHz (کنترلر اصلی) و 48MHz (کنترل از راه دور). html
- MPU6050: ژیروسکوپ و شتابسنج ششمحوره برای پرواز پایدار.
- تثبیتکنندههای ولتاژ یکپارچه (662K و BL8530) و MOSFET (SI2302) برای مدیریت قدرت قابل اعتماد.
-
طراحی ماژولار و بادوام:
- شامل یک موتور کاسهای توخالی 720 و دنده کاهش برای ثبات بار بالا.
- قطعات قابل تعویض برای نگهداری و ارتقاء آسان.
-
ابزارهای توسعه کاربرپسند:
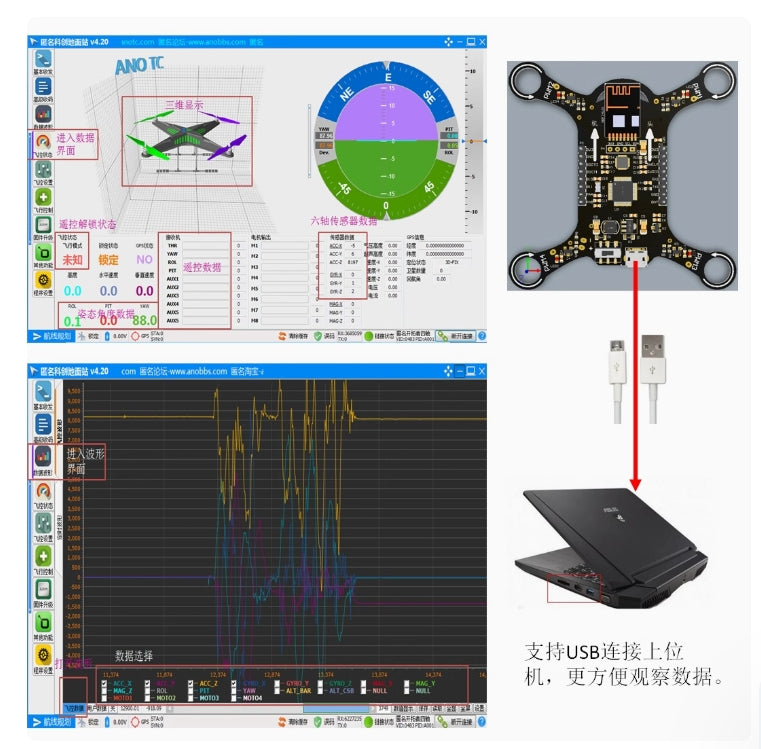
- رابط USB داخلی برای نظارت بر دادهها و اشکالزدایی.
- منابع برنامه متنباز، از جمله محیط Keil MDK5، کد منبع و آموزشهای دقیق.
-
کنترل پرواز پایدار:
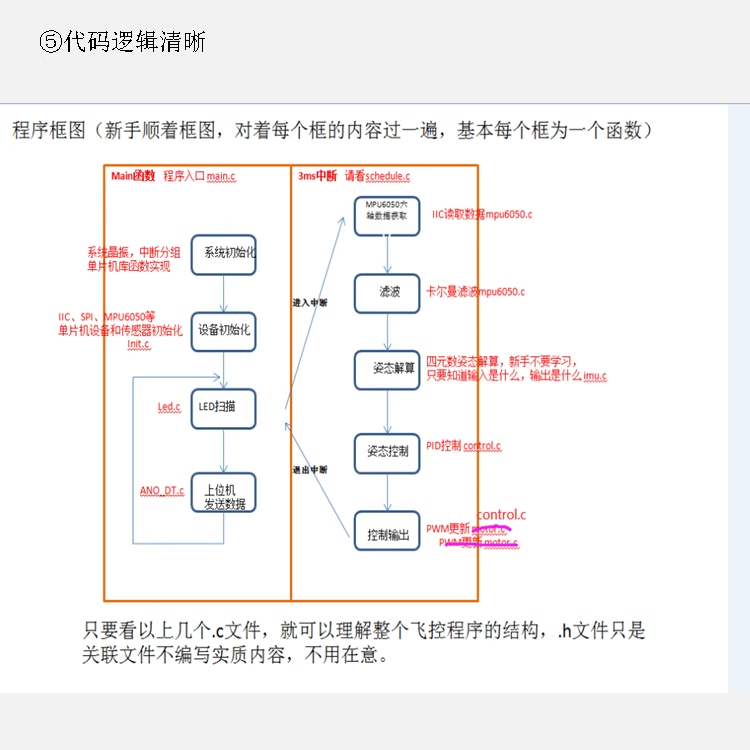
- کنترل PID پیشرفته و فیلتر کردن کالمن برای تثبیت دقیق.
- پشتیبانی از کنترلهای جهتدار به جلو، عقب، چپ و راست. html
مشخصات
| دستهبندی | توضیحات |
|---|---|
| زمان پرواز | 8 دقیقه (بدون قاب محافظ) |
| زمان شارژ | 40 دقیقه |
| برد کنترلر | داخل: 30 متر؛ خارج: 30 متر (توصیه شده برای ساختمانهای زیر سه طبقه) |
| موتور | 720 کاسه توخالی |
| اندازه پروانه | 55 میلیمتر |
| کنترلر پرواز | STM32F103C8T6 + MPU6050 + NRF24L01 |
| وزن | قاب سبک برای کنترل پرواز پایدار. | html
محتویات کیت
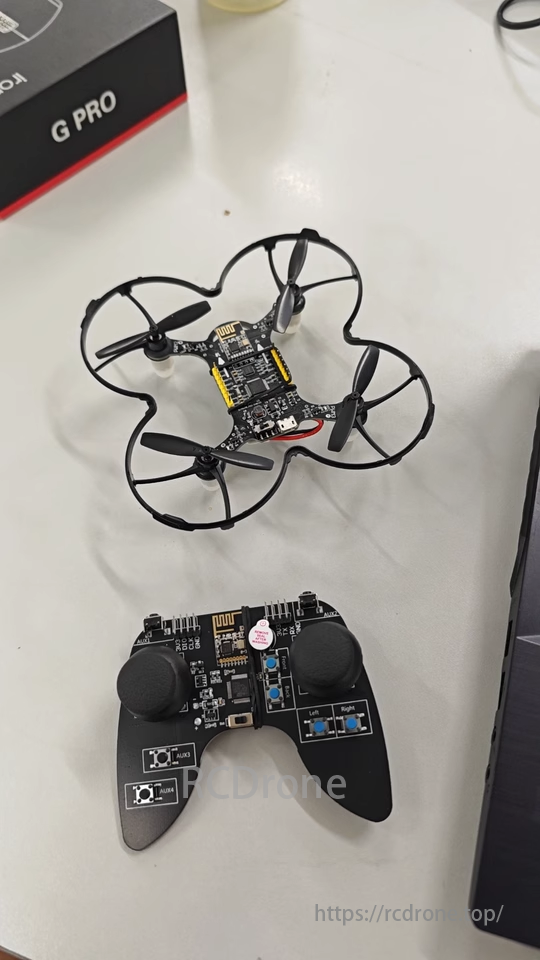
- فریم کوادکوپتر × ۱
- کنترل از راه دور × ۱ (۸ کاناله، ۴ جویاستیک + ۴ دکمه با بازخورد بوقی)
- پروپهای یدکی × ۱ ست
- شارژر باتری USB × ۱
- باتری اصلی ۵۵۰mAh × ۱ (باتریهای اضافی را میتوان بهطور جداگانه خریداری کرد)
- باتری کنترل از راه دور ۵۵۰mAh × ۱
- موتور کاسهای توخالی ۷۲۰ یدکی × ۱
ویژگیهای توسعه اضافی
- آموزشهای جامع: شامل مستندات دقیق، کد منبع، دیتاشیتها و ویدیوهای آزمایشی.
- نظارت بر دادههای بلادرنگ: USB روی برد از بازرسی مستقیم دادهها از طریق نرمافزار کامپیوتر بالایی پشتیبانی میکند.
- سیستم قدرت بهینهشده: تثبیتکنندههای ولتاژ و مسیرهای قدرت مستقل اطمینان از عملکرد روان بدون تداخل را فراهم میکنند. html
- آماده برای توسعه ثانویه: ایدهآل برای تحقیق و توسعه پیشرفته، آزمایش الگوریتمهای پرواز و تغییرات DIY.
راهنماییهای پیشنهادی برای استفاده و ذخیرهسازی
-
محیط عملیاتی:
- برای استفاده در فضای داخلی یا خارجی توصیه میشود (حداقل 30 متر برد).
- محیطهای روشن برای عملکرد بهینه حسگرها.
-
توصیههای ذخیرهسازی:
- در محیطی بدون گرد و غبار یا با پوشش پلاستیکی ذخیره کنید.
- باتریها را بهطور دورهای شارژ کنید تا از آسیب جلوگیری شود.
- حسگرهای نوری و لیزری را با یک پارچه میکروفیبر به آرامی دستکاری کنید.
مزایا
- کد منبع آسان برای خواندن و مناسب برای مبتدیان.
- مناسب برای سفارشیسازی و آزمایش DIY.
- عملکرد پرواز پایدار با قابلیت اطمینان بالا.
کیت هواپیمای بدون سرنشین DIY STM32 ترکیبی از فناوری پیشرفته، فرصتهای یادگیری عملی و اجزای مدولار قوی است که آن را به انتخاب ایدهآل برای هر کسی که به دنبال تسلط بر سیستمهای پرواز پهپاد و برنامهنویسی توکار است، تبدیل میکند.



کیت برد توسعه STM32 T3K04-745 با میکروکنترلر STM32، NRF2A LoI+ و STM3Z F1 O3C. شامل آداپتور SWD و EEPROM 24C02 است. از برنامهنویسی از طریق رابط IFI# پشتیبانی میکند.
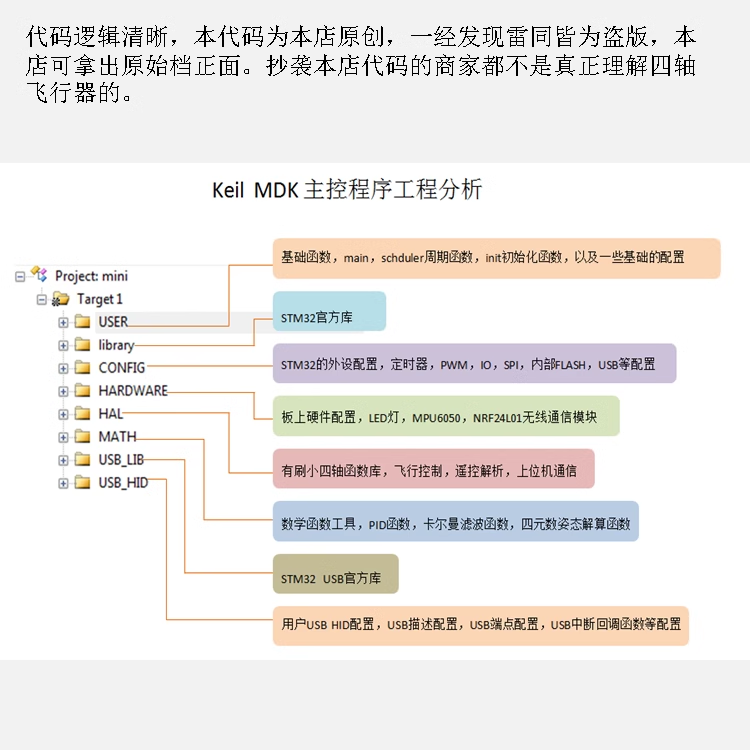
پروژه مینی هدف 1: پیکربندی کتابخانه کاربر STM32. این پروژه از زمانبند اصلی JAMAEEI استفاده میکند، MATH USB_LIB را راهاندازی میکند، و از HAL برای اجزای سختافزاری مانند LED، MPU6000، NRF24L01E استفاده میکند. همچنین شامل USB_HID و WF03IA برای ارتباط USB است. علاوه بر این، از PID، TR-103 و Wt32.c برای توابع USB STM32 استفاده میکند. این پروژه چند خطا دارد از جمله - USB 4623، usbpu@a038nz.
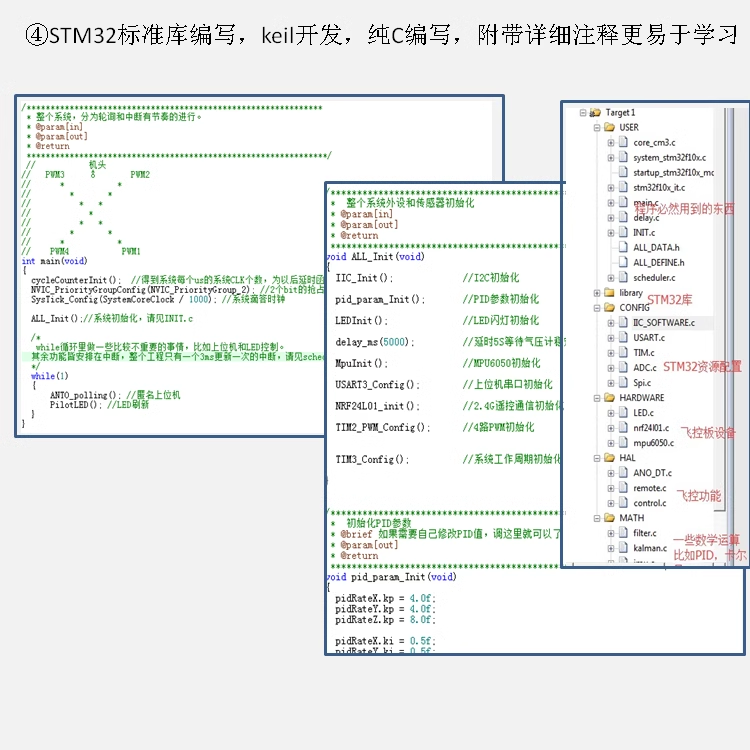
ماژول Kielte STM32 TMEF9AE با IC های 2C4R و M14*E5+4A. سختافزار هدف برای توسعه سیستم با میکروکنترلر STM32. شامل AL_Init، I2c Init، PID_Init، LED_Init، USART، TIM، ADC و سایر ماژولها.
فن اصلی Xtreme Air Flow Technology TFAO برای ZMS. ویژگیها شامل برنامهریزی و Kpilstn Araer IIC-Dsl mpuboso.c EiR با 4Wz Rruald MELXES #TE#epu6o50 c MC، SPI، Mpugo5d.