پهپاد تحقیقاتی SU17 - توسعه پهپادهای منبع باز صنعتی PX4 با MID-360 LiDAR، چهار دوربین SLAM، EGO-Swarm
پهپاد تحقیقاتی SU17 - توسعه پهپادهای منبع باز صنعتی PX4 با MID-360 LiDAR، چهار دوربین SLAM، EGO-Swarm
RCDrone
در دسترس بودن پیکاپ بارگیری نشد
نمای کلی
پهپاد تحقیقاتی SU17 یک کوادکوپتر با عملکرد بالا است که دارای یک باتری 6000 میلی آمپری، MID-360 LiDAR برای نقشه برداری سه بعدی، سیستم چهار دوربین SLAM برای محلی سازی دقیق، و یکپارچه موقعیت یابی GPS+GLONASS. با وزن برخاستن از 2.3 کیلوگرم و الف ظرفیت بار 200 گرم، ارائه می دهد 21 دقیقه زمان پرواز در حالت موقعیت یابی بصری با پشتیبانی از نرم افزار Prometheus، از شناسایی هدف، برنامه ریزی مسیر و ناوبری مستقل پشتیبانی می کند و آن را تبدیل به یک درجه صنعتی راه حلی برای تحقیق و نوآوری
پارامترهای سخت افزاری
هواپیما
| پارامتر | توضیحات |
|---|---|
| نوع هواپیما | کوادکوپتر |
| وزن برخاست (تقریبا) | 2.3 کیلوگرم (با پوشش محافظ و باتری) |
| فاصله مورب | 320 میلی متر |
| ابعاد | طول: 442 میلی متر، عرض: 388 میلی متر، ارتفاع: 174 میلی متر (به استثنای پوشش محافظ) |
| حداکثر بار | 200 گرم |
| زمان پرواز معلق | تقریبا 13 دقیقه (با شناور در 100٪، نه کمتر از 0٪)، موقعیت بصری: 21 دقیقه |
| دقت شناور | GPS: عمودی ± 1.5 متر، افقی ± 2.0 متر |
| 3D LiDAR SLAM: عمودی ± 0.08 متر، افقی ± 0.08 متر | |
| SLAM تصویری 4 دوربین: عمودی ± 0.05 متر، افقی ± 0.05 متر | |
| سطح مقاومت در برابر باد | سطح 4 |
| دمای عملیاتی | -10 تا 40 درجه سانتی گراد |
| تراشه اصلی MCU | STM32H743 |
| IMU | ICM42688/BMI088 |
| فشارسنج | MS5611 |
| قطب نما | QMC5883L |
| رابط | USB Type-C |
رایانه داخلی
| پارامتر | توضیحات |
|---|---|
| پردازنده | اینتل Core i5-8365U |
| ظرفیت حافظه | 8 گیگابایت |
| فرکانس حافظه | LPDDR3@2133MHz |
| ذخیره سازی | 256 گیگابایت NVMe SSD |
| پورت شبکه | Baidu Apollo Ethernet X2، 12V@3A poweمنبع r، از IEEE 1588-2008 (PTP v2) پشتیبانی می کند |
| پورت سریال | پورت سریال TTL X2، 5V/3.3V@500mA power عرضه |
| USB | Type-C X2 (1x USB2.0، 1x USB3.0) |
| HDMI | HDMI 1.4 |
باتری برق
| پارامتر | توضیحات |
|---|---|
| مدل | SU17-L |
| نوع باتری | باتری لیتیوم پلیمری فشار قوی |
| ولتاژ نامی | 26.4 ولت (حداکثر)، 21 ولت (حداقل) |
| ولتاژ ذخیره سازی | 22.8 ولت (معمولی) |
| ظرفیت رتبه بندی شده | 6000 میلی آمپر ساعت |
| وزن | 680 گرم |
| ابعاد | طول: 85.2 میلی متر، عرض: 86.5 میلی متر، ارتفاع: 135 میلی متر |
کنترل از راه دور
| پارامتر | توضیحات |
|---|---|
| مدل | QE-2 |
| کانال ها | 8 |
| قدرت انتقال | 18 تا 20 دسی بل |
| وزن | 294.1 گرم |
گیمبال
| پارامتر | توضیحات |
|---|---|
| زاویه قابل کنترل | 90- تا 30 درجه (محور شیب) |
| پروتکل جریان | RTSP (استاندارد) |
| فرمت رمزگذاری | H.264 |
| قطعنامه | 1080P @ 25fps |
| FOV مورب (D) | 120 درجه |
| FOV عمودی (V) | 54 درجه |
| FOV افقی (H) | 95 درجه |
انتقال تصویر
| پارامتر | توضیحات |
|---|---|
| فرکانس عملیاتی | 2.4 گیگاهرتز |
| قدرت انتقال | 18dBm |
| محدوده ارتباطی | 3 کیلومتر (بدون تداخل، بدون مانع) |
| محدوده تصویر | 1 کیلومتر (کمترین تداخل، بدون مانع) |
| حداکثر پهنای باند | 40 مگابیت بر ثانیه |
دوربین چهارگانه عمق
| پارامتر | توضیحات |
|---|---|
| شتاب دهنده بینایی | VPU Intel Movidius Myriad X |
| حداکثر وضوح | 1296x816 |
| حداکثر نرخ فریم | 1280x800 @ 120fps |
| نوع شاتر | شاتر جهانی |
| فرمت رمزگذاری | تک جریانی 8/10 بیتی |
| FOV | FOV مورب 150 درجه، FOV افقی 127.4 درجه، FOV عمودی 79.7 درجه |
| تعداد سنسورها | 4 (2 جلو + 2 عقب) |
| IMU | BMI270 |
GNSS
| پارامتر | توضیحات |
|---|---|
| دقت افقی | 1.5 متر CEP (با SBAS) |
| دقت سرعت | 0.05 متر بر ثانیه |
| حالت عملیاتی | GPS + GLONASS + BDS + GALILEO + SBAS + QZSS |
شارژر
| پارامتر | توضیحات |
|---|---|
| مدل | LK150-2640500 |
| ولتاژ ورودی AC | 100 الی 240 ولت |
| ولتاژ ورودی DC | 26.4 ولت |
| وزن | 460 گرم |
| جریان شارژ | 5A |
3D LiDAR
| پارامتر | توضیحات |
|---|---|
| مدل | MID-360 |
| طول موج لیزر | 905 نانومتر |
| محدوده اندازه گیری | 40 متر @ 10% انعکاس |
| FOV | افقی 360 درجه، عمودی -7 درجه ~ 52 درجه |
| حداقل برد | 0.1 متر |
| فرکانس نقطه ای | 10 هرتز (معمولی) |
| خروجی نقطه ای | 200000 امتیاز در ثانیه |
| رابط داده | 100 BASE-TX اترنت |
| همگام سازی داده ها | IEEE 1588-2008 (PTP v2)، GPS |
| IMU داخلی | ICM40609 |
| ولتاژ منبع تغذیه | 7 تا 27 ولت |
| ابعاد | 65 میلیمتر (W) × 65 میلیمتر (D) × 60 میلیمتر (بالا) |
| وزن | 115 گرم |
| دمای عملیاتی | -20 درجه سانتی گراد ~ 55 درجه سانتی گراد |
پارامترهای نرم افزار
رایانه داخلی
| پارامتر | توضیحات |
|---|---|
| مدل | اینتل Core i5-8365U |
| سیستم | اوبونتو 20.04 |
| نام کاربری | amov |
| رمز عبور | amov |
| ROS | متذکر |
| OpenCV | 4.7.0 |
| سیستم موقعیت یابی بصری | BSA_SLAM V1 |
نرم افزار پرومتئوس
| پارامتر | توضیحات |
|---|---|
| نسخه | نسخه 2.0 |
| سیستم PrometheusGroundStation | نسخه 1.24.11.27 (نسخه نهایی بر اساس رکورد انتشار ویکی) |
جزئیات
نسخه تحقیقاتی SU17
پهپاد تحقیقاتی با کیفیت در سطح صنعتی
- اختیاری 3D LiDAR: نقشه برداری، موقعیت یابی و اجتناب از موانع ناوبری را فعال می کند.
- نرم افزار پهپاد خودران Prometheus: غنی از دمو برای تسلط سریع بر کنترل پهپاد.
- پلت فرم پرواز در سطح صنعتی: پایدار و باز، تعیین استاندارد جدیدی برای عملکرد پهپادهای تحقیقاتی.

ویژگی های کلیدی
تحقیقات SU17 پلت فرم توسعه پهپاد (به عنوان SU17 نامیده می شود) یک طراحی یکپارچه را اتخاذ می کند که شامل کنترلرهای پرواز، رایانه های داخلی، ماژول های SLAM با دوربین چهارگانه، دوربین های ابری و ماژول های انتقال تصویر برای یکپارچه سازی سطح بالا است که به طور قابل توجهی پایداری و قابلیت اطمینان سخت افزار را افزایش می دهد. SU17 مجهز به نرم افزار پهپاد خودران Prometheus، از ویژگی هایی مانند تشخیص هدف، ردیابی و برنامه ریزی مسیر برای سناریوهای مختلف کنترل پرواز پشتیبانی می کند.
این به صورت اختیاری MID-360 3D LiDAR را با الگوریتم FAST-LIO ترکیب می کند تا به 3D LiDAR SLAM دست یابد و اطلاعات دقیق سنجش و موقعیت یابی محیطی را ارائه دهد. همراه با الگوریتم برنامه ریزی مسیر EGO-Swarm، نقشه برداری سه بعدی و اجتناب از موانع را در محیط های پیچیده امکان پذیر می کند.




سیستم نرم افزاری Prometheus V2
پلتفرم توسعه بر روی چارچوب منبع باز ROS و Prometheus ساخته شده است که عملکردهای غنی و APIهای توسعه ثانویه گسترده را برای برنامه ریزی مجدد کارآمد ارائه می دهد. این امکان دسترسی به اطلاعات موقعیتیابی، حالتهای پرواز، وضعیت باتری، دادههای IMU و سایر رابطهای دادههای وضعیت و حسگر پهپاد را به همراه رابطهای کنترل موقعیت، سرعت، شتاب و نگرش فراهم میکند.
علاوه بر این، شامل مثالهای استفاده برای APIهای مرتبط است. علاوه بر این، پهپاد دارای عملکردهای بررسی ایمنی برای عملیات پروازی (ضد تصادف)، امکان فرود خودکار در شرایط غیرعادی، کاهش خطر سقوط و تضمین فرآیند توسعه ایمنتر است.

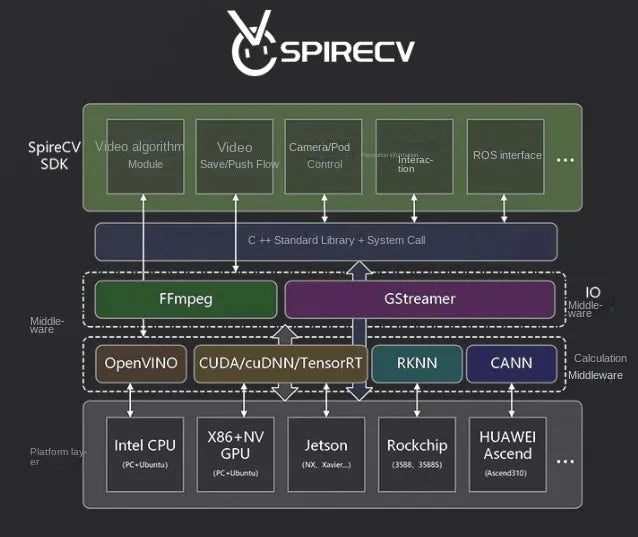
کتابخانه چشم انداز SpireCV
SpireCV Vision Library یک SDK پردازش تصویر در زمان واقعی است که به طور خاص برای سیستم های پهپاد هوشمند طراحی شده است. قابلیت هایی مانند کنترل گیمبال و دوربین، ذخیره سازی و پخش ویدئو، تشخیص هدف، تشخیص و ردیابی را فراهم می کند.
هدف این SDK ارائه عملکرد بالا، قابلیت اطمینان و یک رابط کارآمد برای توسعه دهندگان سیستم های پهپاد هوشمند است. با یک راه حل پردازش بصری غنی از ویژگی، توسعه دهندگان را قادر می سازد تا به طور موثر برنامه های پیچیده مبتنی بر دید را پیاده سازی کنند.
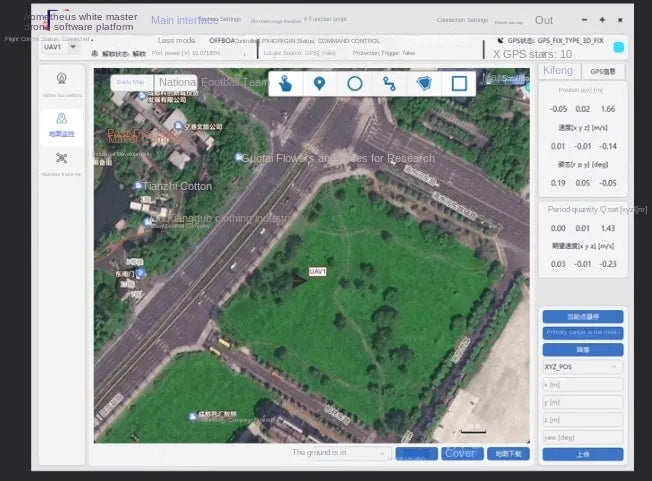
ایستگاه زمینی پرومتئوس
ایستگاه زمینی Prometheus یک رابط تعاملی انسان و هواپیمای بدون سرنشین است که بر اساس سیستم Prometheus توسعه یافته و با استفاده از فناوری Qt ساخته شده است. این امکان تکرار سریع عملکردهای سیستم Prometheus را فراهم می کند و نظارت در زمان واقعی و تجسم سه بعدی وضعیت پهپاد و داده های کنترل را فراهم می کند.
از طریق ایستگاه زمینی، کاربران می توانند دستوراتی مانند برخاستن با یک کلیک، شناور در موقعیت فعلی، فرود و کنترل موقعیت را اجرا کنند. علاوه بر این، این سیستم از دکمههای عملکرد سفارشی برای شروع اسکریپتهای تعریفشده توسط کاربر یا ارسال پیامهای سفارشی پشتیبانی میکند که به طور قابلتوجهی راحتی، کارایی و مقیاسپذیری عملیات کاربر را بهبود میبخشد.
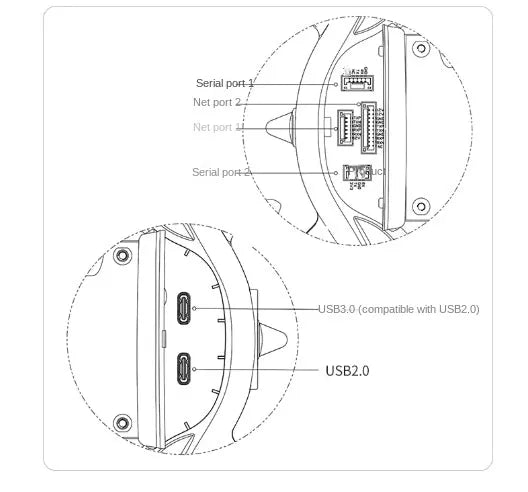
گسترش قدرتمند
پورت های توسعه سخت افزار
-
پورت سریال 1
-
پورت سریال 2
-
پورت شبکه 1
-
پورت شبکه 2
-
پورت های USB:
- USB 3.0 (سازگار با USB 2.0)
- USB 2.0
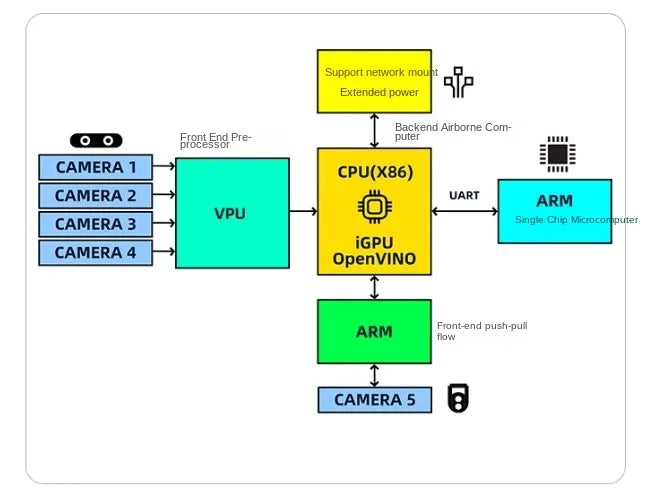
چارچوب سخت افزاری
این تصویر معماری سختافزاری پهپاد SU17 را نشان میدهد و ادغام اجزای مختلف برای پردازش پیشرفته داده و کنترل سیستم را برجسته میکند:
-
دوربینها (دوربین 1-4):
متصل به a VPU (واحد پردازش بینایی) برای پیش پردازش جلویی -
VPU:
داده های بصری را از چندین دوربین مدیریت می کند و آن را به واحدهای پردازش ارسال می کند. -
CPU (X86) با iGPU و OpenVINO:
به عنوان واحد محاسباتی اولیه برای پردازش باطن عمل میکند و از قابلیتهای توسعه متصل به شبکه برای افزایش توان محاسباتی پشتیبانی میکند. -
میکروکنترلر تک چیپ ARM:
با CPU از طریق رابط UART برای عملکردهای کنترلی اضافی تعامل دارد. -
خط لوله جلویی و دوربین 5:
توسط یک پردازنده اختصاصی ARM برای ساده سازی بیشتر داده ها مدیریت می شود.
این چارچوب واحدهای پردازشی متعدد، پشتیبانی از تجزیه و تحلیل تصویر بلادرنگ، وظایف محاسباتی پیشرفته و ارتباط یکپارچه بین اجزای سخت افزاری را ادغام می کند. مدیریت کارآمد عملیات پیچیده در برنامه های تحقیق و توسعه را تضمین می کند.
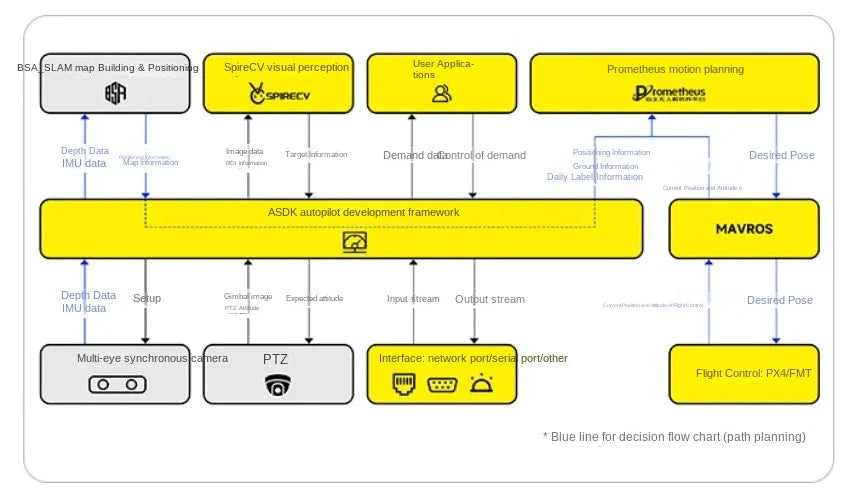
چارچوب نرم افزاری
این نمودار معماری نرم افزاری پهپاد SU17 را نشان می دهد و ادغام سیستم های مختلف برای عملکرد مستقل را برجسته می کند:
-
BSA_SLAM (نقشه برداری و محلی سازی):
- داده های نقشه برداری و موقعیت یابی مکانی را فراهم می کند.
- ورودی های حسگر عمق و IMU را برای درک دقیق محیط ادغام می کند.
-
SpireCV Vision Perception:
- دادههای بصری، از جمله تشخیص شی، اطلاعات بازگشت سرمایه و ردیابی هدف را پردازش میکند.
-
برنامه های کاربردی کاربر:
- رابط هایی برای وظایف کاربر محور مانند تجسم داده ها و ورودی فرمان.
-
برنامه ریزی حرکت پرومتئوس:
- برنامه ریزی مسیر را با استفاده از داده های موقعیت، سرعت و هدف مدیریت می کند.
-
چارچوب رانندگی خودکار ASDK:
- به عنوان لایه پردازش مرکزی، مدیریت جریان داده بین حسگرها، دوربینها، ماژولهای ابری و رابطهای خارجی عمل میکند.
- پشتیبانی از چندین کانال ورودی/خروجی (به عنوان مثال، پورت های شبکه، پورت های سریال).
-
ماوروس:
- برای کنترل وضعیت و موقعیت پرواز با سیستم های کنترل پرواز (PX4/FMT) ارتباط برقرار می کند.
-
ماژول ابری و دوربینهای چند همگامسازی:
- داده های مبتنی بر ابر را برای پردازش پیشرفته یکپارچه می کند.
- ورودی های بصری را برای عملیات با دقت بالا همگام می کند.
خطوط آبی: نشان دهنده مسیرهای تصمیم گیری برای برنامه ریزی مسیر است.
این معماری یک طراحی ماژولار و قابل توسعه را نشان می دهد که ارتباط یکپارچه بین اجزای سخت افزاری و نرم افزاری مختلف را برای عملیات پهپاد قوی امکان پذیر می کند.
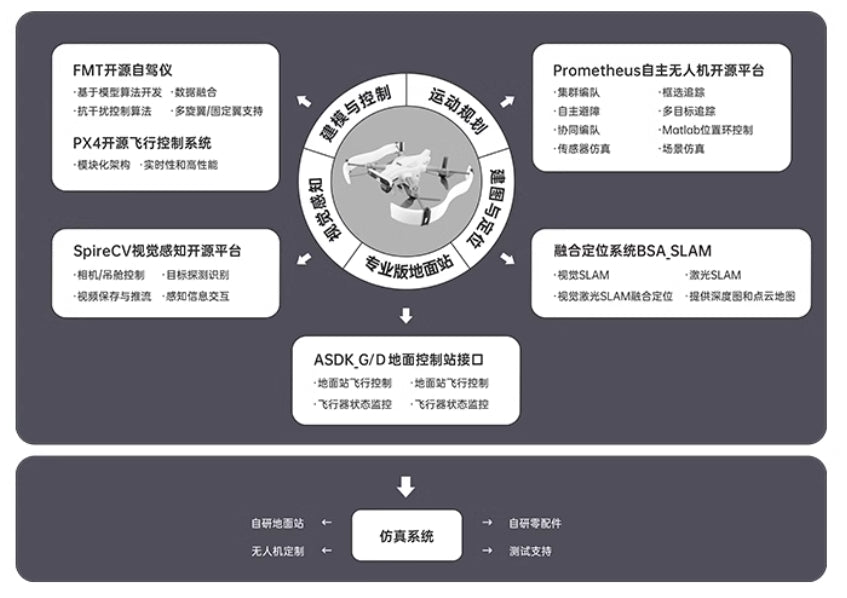
باز بودن هوشمند: راه حل یکپارچه سیستم پهپاد
این نمودار یک معماری جامع و باز را برای سیستمهای پهپاد ارائه میکند که بر مدولار بودن و یکپارچگی در اجزای مختلف تأکید دارد:
-
اجزای اصلی:
- FMT منبع باز Autopilot: کنترل پرواز قابل اعتماد را بر اساس توسعه مدولار، پشتیبانی از محیط های متنوع و یکپارچه سازی داده ها ارائه می دهد.
- سیستم کنترل پرواز PX4: ثبات را تضمین می کند و از سفارشی سازی مدولار پیشرفته پشتیبانی می کند.
- پلتفرم درک چشم انداز SpireCV: بر پردازش تصویر، از جمله تشخیص اشیاء، ردیابی، و پخش ویدئو در زمان واقعی تمرکز می کند.
-
چارچوب های کلیدی:
- پلتفرم پهپاد خودران پرومتئوس: شامل کنترل چند پهپاد، برنامه ریزی حرکت، ناوبری مشترک و شبیه سازی های دنیای واقعی است.
- سیستم BSA_SLAM: ترکیبی از SLAM مبتنی بر دید و SLAM مبتنی بر LiDAR برای موقعیت یابی و نقشه برداری دقیق.
- رابط کنترل ایستگاه زمینی ASDK G/D: ارتباط یکپارچه بین ایستگاه های زمینی و پهپادها را برای نظارت و تنظیمات بلادرنگ فعال می کند.
-
یکپارچه سازی گردش کار:
- فرآیندهایی مانند برنامه ریزی حرکت، نقشه برداری محیط، و ناوبری مستقل را برجسته می کند.
- ادغام با ایستگاه های زمینی حرفه ای برای کنترل مسیر، اجتناب از موانع و مدیریت داده ها در زمان واقعی.
-
پشتیبانی از شبیه سازی:
- شامل یک سیستم شبیه سازی برای آزمایش ماموریت مستقل، کنترل پهپاد و اعتبار سنجی اجزا می باشد.
این سیستم یک راه حل پیشرفته برای توسعه پهپاد مستقل، با قابلیت های مقیاس پذیر برای تحقیق، کاربرد و آزمایش در سناریوهای مختلف را نشان می دهد.
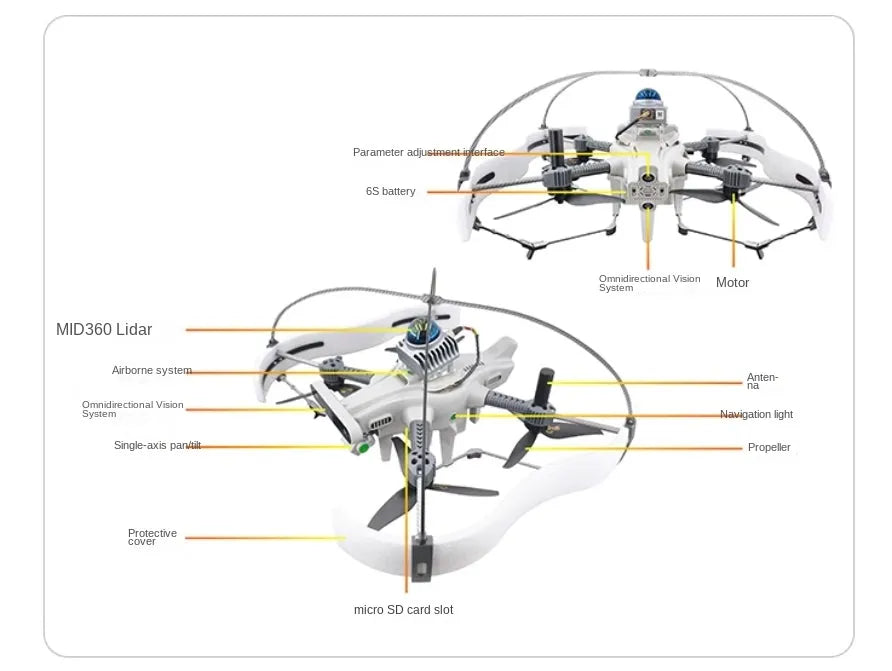
اجزای ساختاری پهپاد تحقیقاتی SU17 با تاکید بر پایداری و طراحی پیشرفته آن. ویژگی های کلیدی عبارتند از MID360 LiDAR برای نقشه برداری دقیق، یک سیستم بینایی همه جانبه برای درک جامع محیطی، الف گیمبال تک محوره برای تصویربرداری پایدار و قوی باتری 6S برای قدرت طولانی سایر اجزای ضروری عبارتند از سیستم پروانه، آنتن، چراغ های ناوبری، و الف اسلات کارت micro SD برای ذخیره سازی داده ها این طراحی سخت افزار پیشرفته را ادغام می کند و از قابلیت اطمینان و عملکرد بالا برای کاربردهای مختلف تحقیقاتی اطمینان می دهد.
Related Collections