TI5 CRA-RI50-70-PRO-XX مفصل ربات یکپارچه-دنده هارمونیک ، شافت توخالی ، رمزگذار 24-48V 150W ، رمزگذار 17 بیتی ، CAN/EtherCat
TI5 CRA-RI50-70-PRO-XX مفصل ربات یکپارچه-دنده هارمونیک ، شافت توخالی ، رمزگذار 24-48V 150W ، رمزگذار 17 بیتی ، CAN/EtherCat
Ti5 Robot
در دسترس بودن پیکاپ بارگیری نشد
نمای کلی
ربات Ti5 CRA-RI50-70-PRO-XX یک مفصل ربات یکپارچه و جمع و جور با شفت توخالی است که ترکیبی از کاهنده هارمونیک دقیق، موتور گشتاور بدون فریم، درایو FOC، و رمزگذار مطلق در یک ماژول. با یک قطر بیرونی ۸۰ میلیمتر، سوراخ عرضی ۱۰ میلیمتری، قدرت ۱۵۰ وات، و ۲۴–۴۸ ولت عرضه، تا ... ارائه میدهد اوج ۳۴ نیوتن متر (وابسته به نسبت) با واکنش منفی نزدیک به صفر و کم صداارتباط بین ... قابل انتخاب است میتوان و اترکت; انکودرهای تکی یا دوتایی و یک ترمز الکترومغناطیسی نوع (-B) موجود است. این مفصل برای رباتهای همکار، بازوهای مکانیکی متحرک، گیمبالهای پن-تیلت، تجهیزات صنعتی، رباتهای بازرسی قدرت و سکوهای دریایی طراحی شده است.
ویژگیهای کلیدی
-
مفصل همه کاره: کاهنده هارمونیک + موتور گشتاور BLDC + درایور FOC + انکودر مطلق در یک بدنه جمع و جور و مهر و موم شده.
-
شفت توخالی: 10 میلیمتر گذرگاه مرکزی برای کابلها/خطوط هوایی.
-
بازخورد با دقت بالا: انکودر مطلق ۱۷ بیتی، حافظه چند نوبتی خاموش شدن؛ انکودر تکی/دوتایی گزینهها
-
خروجی با لقی کم: مرحله هارمونیک با تقریباً ۱۰–۲۰ ثانیه قوسی واکنش شدید (به ازای هر نسبت).
-
آرام &آمپر؛ صافموتور گشتاور با تعداد قطبهای زیاد برای پایداری در سرعتهای پایین و نویز صوتی کم.
-
گزینههای رابط: میتوان یا اترکت اتوبوس؛ اختیاری ترمز نگه دارنده (پسوند مدل -ب).
-
قابل تنظیم: نسخههای ضد آب/دمای پایین از کارخانه موجود است.
مدلها &آمپر؛ گزینهها
-
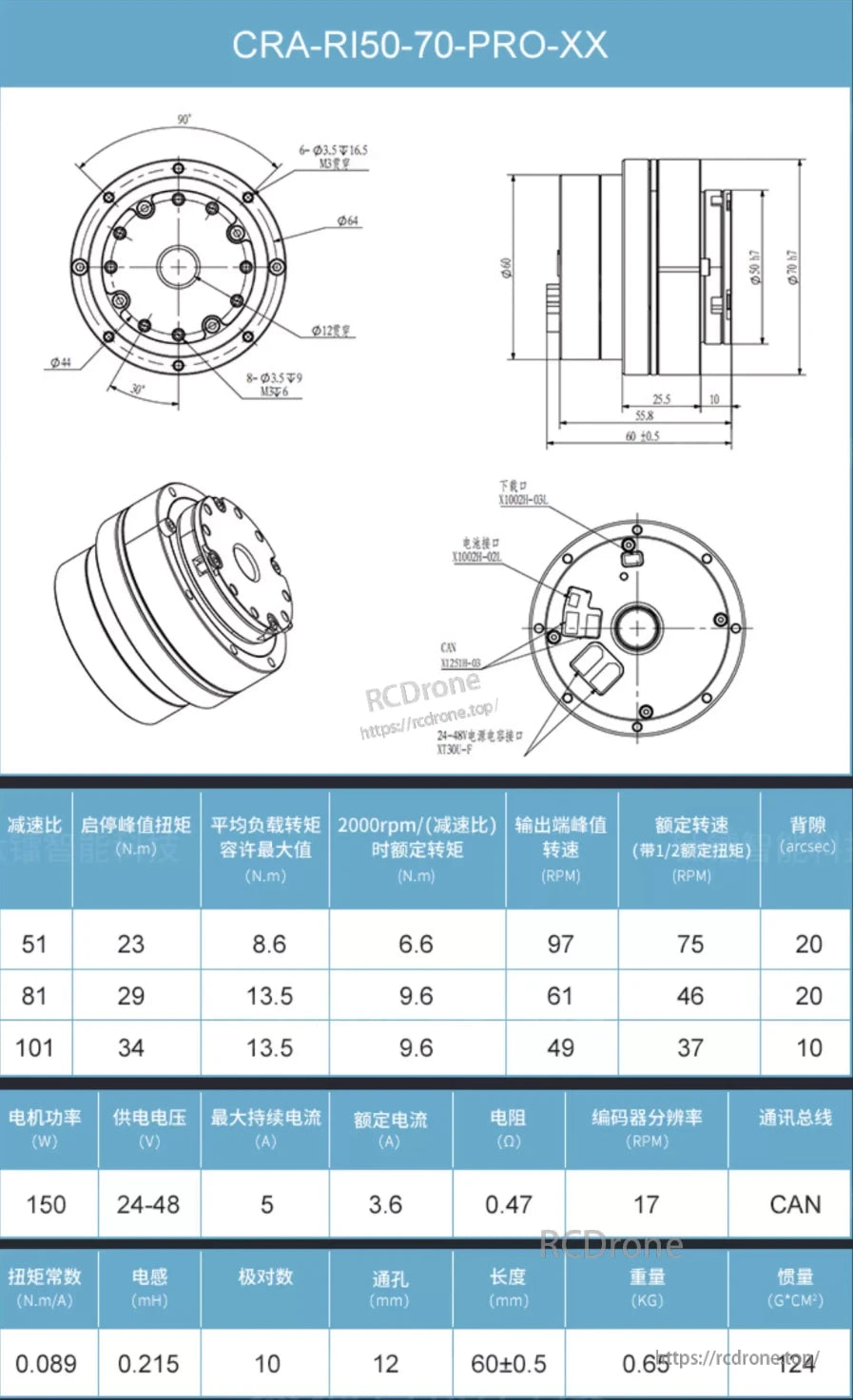
CRA-RI50-70-PRO-XX - استاندارد، بدون ترمز (≈ 60 ± 0.5 میلیمتر طول، ≈۰.۶۵ کیلوگرم، اینرسی ≈ ۱۲۴ گرم بر سانتیمتر مربع)
-
CRA-RI50-70-PRO-XX-B — با ترمز (طول ≈۸۱.۷ ± ۰.۵ میلیمتر)
-
اتوبوس: میتوان یا اترکت
-
رمزگذار: مجرد یا دوگانه رمزگذار
عملکرد رتبهبندیشده بر اساس نسبت دنده
| نسبت دنده | گشتاور اوج شروع/توقف (نیوتن متر) | حداکثر میانگین گشتاور بار (نیوتن متر) | گشتاور نامی @ ۲۰۰۰ دور در دقیقه/نسبت (نیوتن · متر) | سرعت خروجی اوج (دور در دقیقه) | سرعت نامی در ½ دور در دقیقه | لقی (کمان-ثانیه) |
|---|---|---|---|---|---|---|
| ۵۱:۱ | ۲۳ | ۸.۶ | ۶.۶ | ۹۷ | ۷۵ | ۲۰ |
| ۸۱:۱ | ۲۹ | ۱۳.۵ | ۹.۶ | ۶۱ | ۴۶ | ۲۰ |
| ۱۰۱:۱ | ۳۴ | ۱۳.۵ | ۹.۶ | ۴۹ | ۳۷ | ۱۰ |
نکات: ارقام سرعت/گشتاور خروجی در خروجی کاهنده هستند. مشخصات لقی کمتر برای نوع 101:1 اعمال میشود.
برق &آمپر؛ دادههای موتور
-
قدرت: ۱۵۰ وات
-
ولتاژ تغذیه: ۲۴–۴۸ ولت جریان مستقیم
-
حداکثر جریان مداوم: ۵ الف | جریان نامی: ۳.۶ آمپر | مقاومت فاز: ۰.۴۷ اهم
-
ثابت گشتاور: ۰.۰۸۹ نیوتن متر بر آمپر | اندوکتانس: ۰.۲۱۵ میلیهانری | جفتهای قطبی: ۱۰
-
وضوح رمزگذار: مطلق ۱۷ بیتی (حافظه خاموش شدن)
-
کنترل میدانی (FOC) یکپارچه
رابط مکانیکی
-
قطر بیرونی: قطر ۸۰ میلیمتر
-
دایره پیچ: Ø64 میلیمتر (فلنج جلویی)
-
از طریق سوراخ: قطر ۱۰ میلیمتر
-
طول کلی: 60 ± 0.5 میلیمتر (استاندارد)/۸۱.۷ ± ۰.۵ میلیمتر (-B با ترمز)
-
توده: ~۰.۶۵ کیلوگرم (استاندارد)
-
اینرسی (روتور): ~۱۲۴ گرم بر سانتیمتر مربع (استاندارد)
-
قسمت جلویی دارای چندین بست M3 است؛ الگوی سوراخ دقیق طبق نقشه مکانیکی.
اتصال
-
اتوبوس: میتوان یا اترکت
-
انواع: تک رمزگذار/رمزگذار دوگانه
-
گزینه ترمز: -ب مدلها شامل یک ترمز نگهدارنده یکپارچه هستند.
کاربردهای معمول
-
بازوهای رباتیک مشارکتی و رومیزی، رباتهای خدماتی
-
گیمبالها و سیستمهای دوربین با قابلیت چرخش افقی
-
UGV های دستکاری سیار و بازرسی برقی
-
ماژولهای اتوماسیون صنعتی و تجهیزات دریایی
چه چیزهایی شامل میشود؟
-
اتصال یکپارچه CRA-RI50-70-PRO-XX (نسبت انتخاب شده) &آمپر؛ گزینهها)
-
اتصالات جفت گیری &آمپر؛ پیچهای پایه (به ازای هر کیت)
-
طراحی مکانیکی &آمپر؛ پیناوت (دیجیتال)
کد سفارش (مثال)
CRA-RI50-70-PRO-بیست و یک-(B، T، 2E، IPXX)
-
بیست و یکنسبت دنده (۵۱/۸۱/۱۰۱)
-
ب: با ترمز (خالی = بدون ترمز)
-
تی/۲ایگزینههای انکودر تکی/دوتایی
-
آیپیاکس: امتیاز ضد آب اختیاری (در صورت درخواست)
جزئیات

مشخصات مفصل رباتیک CRA-RI50-70-PRO-XX: موتور ۱۵۰ وات، ۲۴-۴۸ ولت، گذرگاه CAN، نسبت دنده ۵۱-۱۰۱، حداکثر گشتاور تا ۳۴ نیوتن متر، طول ۶۰±۰.۵ میلیمتر، وزن ۰.۶۵ کیلوگرم، اینرسی ۱۲۴ گرم بر سانتیمتر مربع.
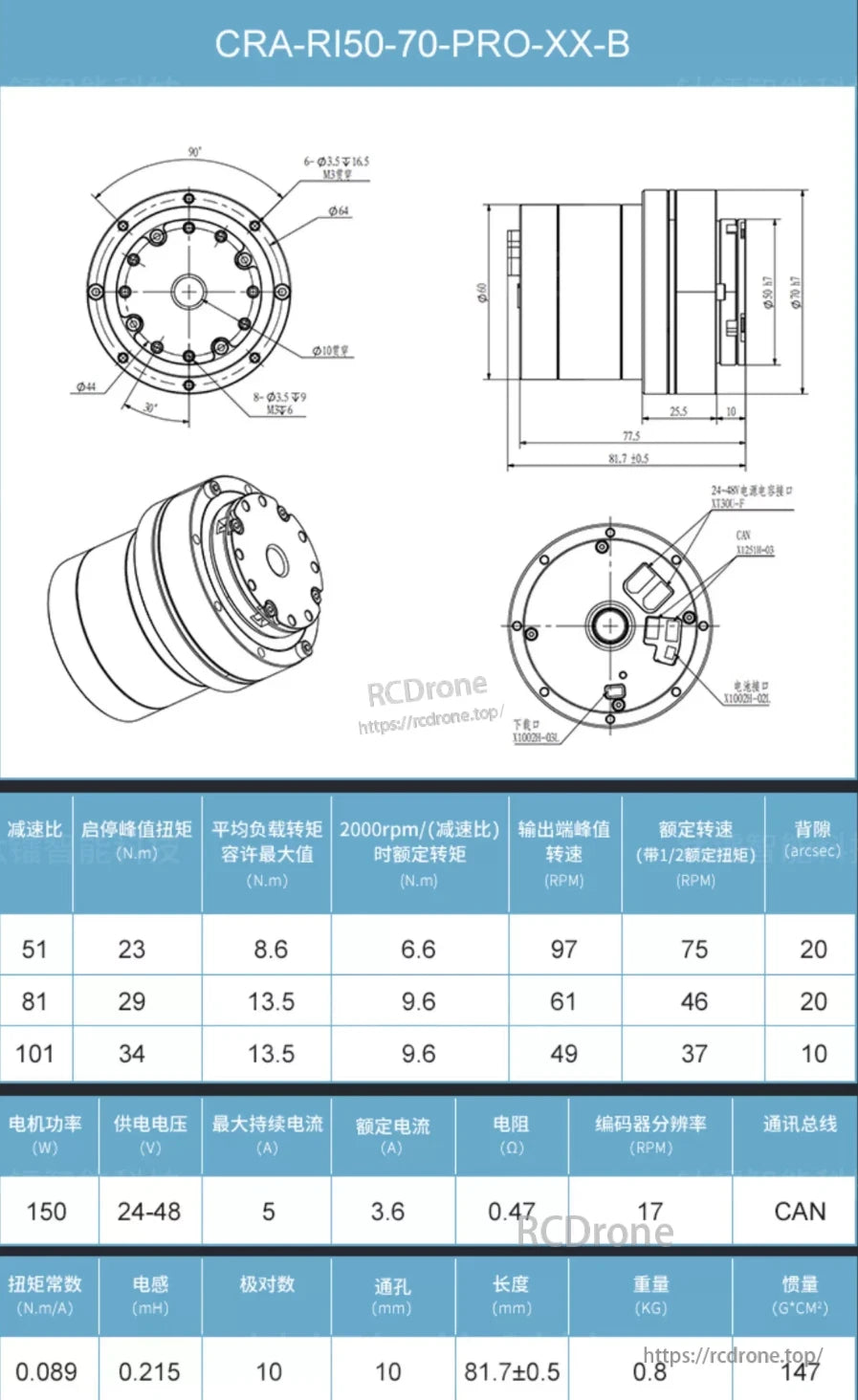
مفصل رباتیک با نسبت دندههای ۵۱، ۸۱ یا ۱۰۱، توان ۱۵۰ وات، تغذیه ۲۴ تا ۴۸ ولت، ارتباط CAN، وضوح انکودر ۱۷ دور در دقیقه، طول ۸۱.۷±۰.۵ میلیمتر و وزن ۰.۸ کیلوگرم.
Related Collections