








موتور ماژول مفصل Ti5 ROBOT CRA-RI30-40-PRO با توان ۳۶ وات، ولتاژ ۲۴-۴۸ ولت، انکودر ۱۶ بیت و نسبت کاهش ۵۱/۱۰۱
موتور ماژول مفصل Ti5 ROBOT CRA-RI30-40-PRO با توان ۳۶ وات، ولتاژ ۲۴-۴۸ ولت، انکودر ۱۶ بیت و نسبت کاهش ۵۱/۱۰۱
Ti5 ROBOT
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
Ti5 ROBOT CRA-RI30-40-PRO یک موتور ماژول مفصلی سبک وزن است که برای عملگرهای مفصلی رباتیک طراحی شده است. نکات برجسته محصول شامل: "ماژول مفصلی سبک وزن"، "کلید پیشرفت سختافزاری"، "سبک وزن: اندازه کوچک، عملکرد قدرتمند" و "چگالی گشتاور بالا (شاخصهای کلیدی عملکرد و ویژگیهای سبک وزن)" میباشد.
برای راهنمایی در پیکربندی و پشتیبانی فنی، با https://rcdrone.top/ تماس بگیرید یا به ایمیل [email protected].
پیام ارسال کنید.ویژگیهای کلیدی
سبک وزن
- فوقالعاده سبک با قابلیت استفاده قویتر.
- کاهش وزن بیش از 1/3.
- به طور قابل توجهی مصرف انرژی عملیاتی را کاهش دهید.
عملکرد قویتر
- استانداردهای عملکرد صنعتی.
- چگالی گشتاور دو برابر محصولات مشابه است.
- درجه خودرویی، ضد الکتریسیته ساکن، ضد لرزش.
مدولارization
- شش ماژول به طور ارگانیک یکپارچه شدهاند.
- سه سری میتوانند به طور جامع به مشتریان در سناریوهای مختلف سازگار شوند.
- به طور قابل توجهی سختی تولید را کاهش میدهد؛ کارایی تولید را بهبود میبخشد.
ترکیب ماژول داخلی (برچسبگذاری شده)
- پوشش پشتی موتور
- برد کنترل
- انکودر
- محفظه استاتور
- روتور موتور
- استاتور موتور
- کاهندههای هارمونیک
- پوشش فلکساسپلاین
مقایسه چگالی گشتاور (Nm/kg)
“مقایسه چگالی گشتاور محصولات مشترک اصلی (Nm/kg)” مقادیر نشان داده شده:
- نسل بعدی ربات Ti5: 250+
- یک برند آمریکایی: 254
- مدل تولید انبوه ربات Ti5: 192
- یک برند چینی: 80.4
- یک برند کانادایی: 53.5
- یک برند کرهای: 33.8
بیانیههای تولید انبوه و توسعه (همانطور که نشان داده شده است)
- مزیت تولید انبوه پیشرو در صنعت.
- تمامی سختافزارهای زیرساخت قابل کنترل هستند و نرخ بومیسازی میتواند به 100% برسد.
- دارای یک زنجیره ابزار نرمافزاری کامل برای توسعه ربات، که به تسریع تحقیق و توسعه کمک میکند.
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
مشخصات
| پارامتر | مقدار |
|---|---|
| مدل موتور | CRA-RI30-40-PRO-XX / CRA-RI30-40-PRO-XX-B |
| نسبت کاهش | 51 / 101 |
| گشتاور اوج شروع و توقف | 3.3 / 4.8 N.m |
| حداکثر گشتاور بار متوسط مجاز | 2.3 / 3.3 N.m |
| گشتاور نامی در این سرعت 2000 Rpm/(نسبت کاهش) | 1.8 / 2.۴ N·m |
| سرعت چرخش اوج خروجی | ۱۱۸ / ۵۹ RPM |
| سرعت نامی | ۹۰ / ۴۵ RPM |
| قدرت موتور | ۳۶ W |
| ولتاژ تأمین | ۲۴-۴۸ V |
| حداکثر جریان مداوم | ۲ A |
| جریان نامی | ۱ A |
| رزولوشن انکودر | ۱۶ بیت |
| فاصله پشتی | ۴۰ / ۴۰ آرک ثانیه |
| ثابت گشتاور | ۰.۰۲۴ N·m/A |
| سوراخ | ۶ mm |
| طول: بدون ترمز / با ترمز | ۶۰±۰.۵ mm / ۷۸.۶±۰.۵ mm |
| وزن: بدون ترمز / با ترمز | ۰.۱۹ kg / ۰.۲۷ kg |
| اینرسی: بدون ترمز / با ترمز | ۲۷.۴ g·cm² / ۴۵.1 g·cm² |
راهنماها
جزئیات

CRA-RI30-40-PRO برای مفاصل رباتیک فشرده طراحی شده است و هدف آن عملکرد بالا در یک فرم سبک است.

یک معماری مدولار یکپارچه چندین بخش عملکردی را در یک ماژول آماده برای مفصل ترکیب میکند تا ساخت و ساز را ساده کند.

یک چیدمان داخلی به شدت یکپارچه از استقرار آماده برای تولید و یک زنجیره ابزار توسعه ربات کامل پشتیبانی میکند.

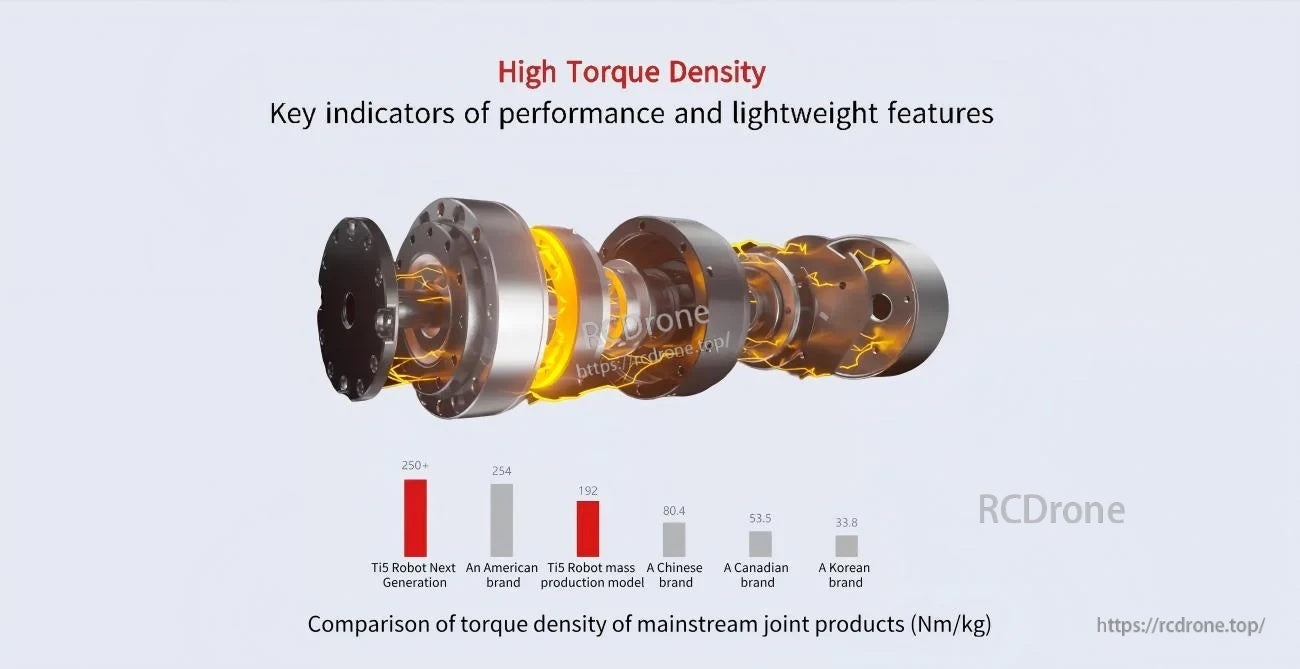
چگالی گشتاور به عنوان یک شاخص کلیدی از عملکرد سبک برای ماژولهای مفصلی تأکید شده است.
Related Collections








