



ربات TI5 CRA-RI40-52-PRO-XX محرک مشترک یکپارچه مشترک ، درایو هارمونیک ، 7 N · M ، 24-48 V ، CAN/ETHERCAT ، IP65 ، رمزگذاری توخالی ، رمزگذار تک/دوگانه (گزینه ترمز)
ربات TI5 CRA-RI40-52-PRO-XX محرک مشترک یکپارچه مشترک ، درایو هارمونیک ، 7 N · M ، 24-48 V ، CAN/ETHERCAT ، IP65 ، رمزگذاری توخالی ، رمزگذار تک/دوگانه (گزینه ترمز)
Ti5 Robot
در دسترس بودن پیکاپ بارگیری نشد
نمای کلی
ربات Ti5 مدل CRA-RI40-52-PRO-XX یک ماژول اتصال فشرده و یکپارچه است که یک موتور گشتاور بدون فریم، کاهنده هارمونیک دقیق، سروو درایور و انکودر مغناطیسی را در یک واحد IP65 ترکیب میکند. با منبع تغذیه 24-48 ولت DC و توان نامی 90 وات، گشتاور نامی 7 نیوتن متر و سرعت خروجی نامی 80 دور در دقیقه را برای رباتهای انساننما، اسکلتهای بیرونی، بازوهای مشترک، گیمبالها، AGVها و سایر کاربردهای پیشرفته ارائه میدهد. یک سوراخ عبور مرکزی از مسیریابی کابل پشتیبانی میکند. پیکربندیهای انکودر تکی یا دوتایی و گزینه ترمز نگهدارنده نیز در دسترس هستند. ارتباط به طور پیشفرض از طریق CAN و با قابلیت انتخاب EtherCAT انجام میشود.
ویژگیهای کلیدی
-
موتور یکپارچه + درایو + کاهنده هارمونیک + انکودر (مغناطیسی)
-
گشتاور نامی ۷ نیوتن متر؛ سرعت خروجی نامی ۸۰ دور در دقیقه؛ توان ۹۰ وات
-
دو نسبت کاهش: ۵۱:۱ یا ۱۰۱:۱
-
دقت بالا: انکودر ۱۷ بیتی، لقی معمولی ۴۰ آرک ثانیه (۵۱)/۳۰ آرک ثانیه (۱۰۱)
-
سر و صدای کم، دندانهدار شدن کم؛ طراحی با چگالی گشتاور بالا
-
درجه حفاظت IP65؛ دمای پایین اختیاری &آمپر؛ سفارشی سازی ضد آب
-
گذرگاه ارتباطی: CAN (استاندارد) یا EtherCAT (اختیاری)
-
گزینههای تک/دو انکودر؛ نسخههای ترمزدار یا بدون ترمز
-
سوراخ عبور سیم: ۱۲ میلیمتر (استاندارد)/۱۱ میلیمتر (ترمزدار)
-
کاربردهای معمول: رباتهای انساننما، مفاصل کوبوت، اسکلتهای بیرونی، رباتهای شیبدار، تجهیزات صنعتی، رباتهای بازرسی برق، سیستمهای دریایی/خودرویی
عملکرد بر اساس نسبت دنده
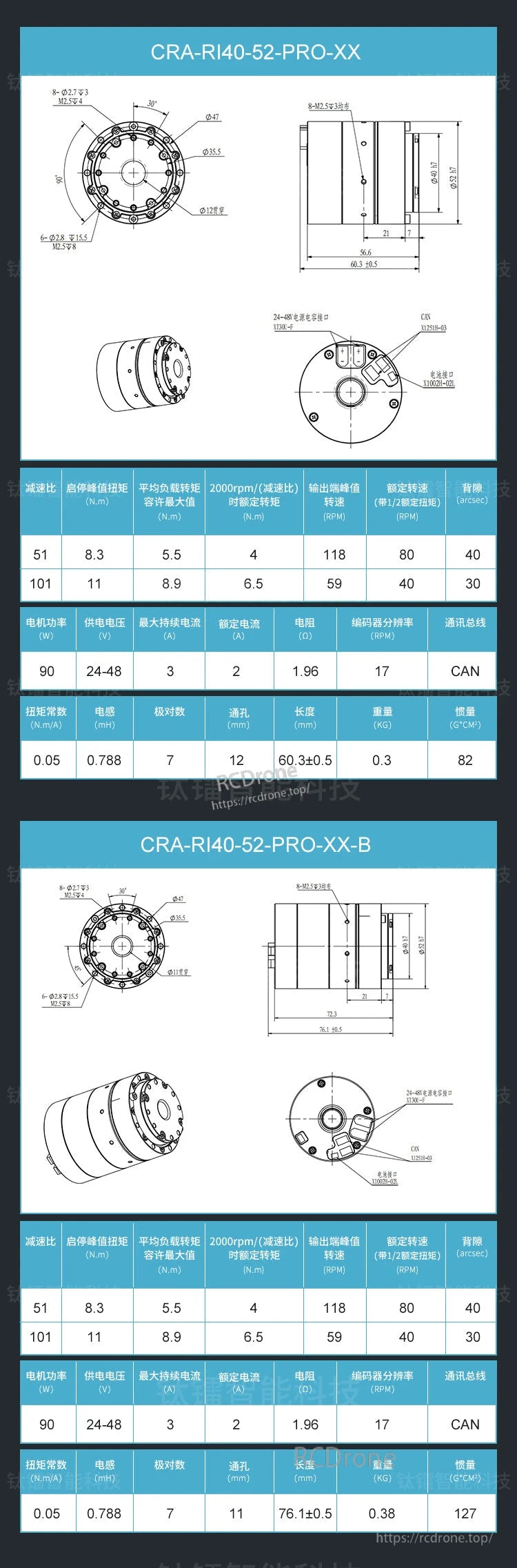
| مورد | ۵۱:۱ | ۱۰۱:۱ |
|---|---|---|
| گشتاور اوج شروع/توقف (نیوتن متر) | ۸.۳ | ۱۱ |
| حداکثر گشتاور بار متوسط مجاز (نیوتن متر) | ۵.۵ | ۸.۹ |
| گشتاور نامی در 2000 دور در دقیقه/(نسبت) (نیوتن متر) | ۴ | ۶.۵ |
| حداکثر سرعت خروجی (دور در دقیقه) | ۱۱۸ | ۵۹ |
| سرعت نامی در ½ گشتاور نامی (دور در دقیقه) | ۸۰ | ۸۰ |
| واکنش معکوس (arcsec) | ۴۰ | ۳۰ |
مشخصات الکتریکی
-
ولتاژ تغذیه: ۲۴ تا ۴۸ ولت جریان مستقیم
-
جریان نامی/جریان پیوسته: ۲ الف (حداکثر جریان مداوم ۳ آمپر)
-
مقاومت فاز: ۱.۹۶ اهم
-
اندوکتانس: ۰.۷۸۸ میلیهانری
-
گشتاور ثابت: 0.05 نیوتن متر بر آمپر
-
جفت قطبها: ۷
-
وضوح رمزگذار: ۱۷ بیتی (مغناطیسی)
مکانیکی &آمپر؛ رابط
-
درجه حفاظت: IP65
-
سرعت خروجی نامی: ۸۰ دور در دقیقه
-
ارتباطات: میتوان (پیشفرض)/اترکت (گزینه)
-
سوراخ عبور (برای سیم کشی): قطر ۱۲ میلیمتر (استاندارد)/قطر ۱۱ میلیمتر (با ترمز)
-
طول &آمپر؛ اینرسی (بدون ترمز): ۶۰.۳ ± ۰.۵ میلیمتر، ۸۲ گرم بر سانتیمتر مربع
-
طول &آمپر؛ اینرسی (نسخه ترمز -B): ۷۶.۱ ± ۰.۵ میلیمتر، ۱۲۷ گرم بر سانتیمتر مربع
-
جرم: ۰.۳ کیلوگرم
-
طول کابل: ۵ متر
-
محیط عملیاتی (معمولی): تا ۶۰ درجه سانتیگراد
-
مواد: اجزای آلومینیومی با کاهنده هارمونیک دقیق
انواع &آمپر؛ گزینهها
-
ارتباطات: CAN یا EtherCAT
-
رمزگذار: انکودر مغناطیسی تکی یا دوتایی
-
ترمز: بدون ترمز (استاندارد) یا -ب نسخه ترمز نگهدارنده
-
محیط زیست: بستهبندی ضد آب و دمای پایین قابل تنظیم
-
نمادگذاری سریها: CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) (نشان دهنده کاهنده سرعت، تعداد سنسور گشتاور/انکودر، نسبت تبدیل، حفاظت و غیره است)
کاربردهای معمول
مفاصل انساننما (شانه/آرنج/لگن/زانو)، بازوهای رباتیک مشارکتی، محرکهای اسکلت بیرونی، گیمبالهای پن-تیلت/ویژن، محورهای اتوماسیون صنعتی، خودروهای بدون سرنشین/خودروهای خودران بازرسی قدرتی و مکانیزمهای کمکی دریایی/خودرویی.
یادداشتها
-
با استفاده از الگوهای پیچ مشخص شده و تلرانسهای نشان داده شده در نقشهها، نصب کنید.
-
قبل از سفارش، نسبت، پیکربندی انکودر، گذرگاه ارتباطی و الزامات ترمز را تأیید کنید.
-
با توجه به ماهیت صنعتی این محصول، واحدهای نصب شده/استفاده شده معمولاً قابل بازگشت نیستند؛ قبل از خرید، با کارشناسان فنی در مورد اندازه مشورت کنید.
جزئیات
عملگر مفصل ربات Ti5 مدل CRA-R140-52-PRO-XX و -B دارای توان 90 وات، ولتاژ تغذیه 24 تا 48 ولت، حداکثر جریان 3 آمپر، وضوح انکودر 17 دور در دقیقه، گشتاور، سرعت و ارتباط CAN هستند.

عملگر مفصل ربات Ti5 مدل CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) شامل ترمز، سنسور گشتاور، انکودرهای دوگانه، درجه ضد آب بودن، نسبت کاهش حجم، قطر خارجی و نوع موتور است.

عملگرهای مفصل سری PRO برای رباتهای انساننما، اسکلتهای بیرونی، رباتهای مشارکتی، خودروها، AGVها. ویژگیها: استحکام بالا، عمر طولانی، چگالی گشتاور بالا، گشتاور دندانهای پایین، ضد آب، ضد گرد و غبار، ضد انفجار، سر و صدای کم، دقت بالا، طراحی شفت توخالی.
Related Collections



