


Ti5 Robot CRA-RI60-70-Pro-S-XX ACTUATOR مشترک توخالی ، 24-48 ولت CAN/Ethercat ، IP65 ، 51-102: 1 ، تا 66 N · M Peak ، -B گزینه ترمز
Ti5 Robot CRA-RI60-70-Pro-S-XX ACTUATOR مشترک توخالی ، 24-48 ولت CAN/Ethercat ، IP65 ، 51-102: 1 ، تا 66 N · M Peak ، -B گزینه ترمز
Ti5 Robot
در دسترس بودن پیکاپ بارگیری نشد
نمای کلی
ربات Ti5 CRA-RI60-70-PRO-S-XX یک مفصل ربات یکپارچه با شفت توخالی و جمع و جور برای بازوها، رباتهای انساننما، اسکلتهای بیرونی، مکانیزمهای پهپاد و پلتفرمهای متحرک است. این مفصل یک موتور گشتاور BLDC بدون فریم، کاهنده دقت، انکودر مطلق مغناطیسی (تکی یا دوتایی) و رابط درایو را در یک ماژول IP65 ترکیب میکند. معماری PRO-S کوچکسازی و پاسخ دینامیکی سریع را در عین حفظ نسبت بار به وزن بالا در اولویت قرار میدهد. ارتباط به طور پیشفرض از طریق CAN انجام میشود و EtherCAT نیز در دسترس است. یک نسخه ترمز کارخانهای "-B" یک ترمز نگهدارنده برای ایمنی در هنگام خاموش شدن اضافه میکند. (تمام مقادیر زیر از برگههای داده ارائه شده و تصاویر محصول خوانده میشوند.)
ویژگیهای کلیدی
-
ماژول اتصال فشرده هالو شفت (سری Ø60/Ø70) برای مسیریابی آسان کابل و پنوماتیک
-
نسبتهای ۵۱، ۸۱، ۱۰۱، ۱۰۲ با لقی کم (بسته به نسبت تا ۱۰ ثانیه قوسی)
-
حداکثر گشتاور تا 66 نیوتن متر؛ گشتاور نامی تا 30 نیوتن متر (در شرایط نسبت سرعت 2000 دور در دقیقه)
-
پاسخ سریع؛ طراحی با نسبت وزن به وزن بالا (≈0.69 کیلوگرم استاندارد/≈0.84 کیلوگرم با ترمز)
-
بدنه ضد آب/گرد و غبار IP65، ساختار آلومینیومی
-
انکودر مطلق مغناطیسی، ۱۷ بیتی؛ گزینههای انکودر تکی یا دوتایی
-
تغذیه ۲۴ تا ۴۸ ولت DC، باس CAN (EtherCAT اختیاری)؛ شفت داخلی Ø۱۸ میلیمتر
-
مدل «-B» ترمز قطع برق اضافه میکند؛ بدنه بلندتر و اینرسی بالاتر برای نگهداشتن
مشخصات
برق رایج &آمپر؛ مکانیکی
-
توان موتور: ۳۰۰ وات
-
ولتاژ تغذیه: ۲۴–۴۸ ولت DC
-
حداکثر جریان مداوم: ۶.۷ آمپر؛ جریان نامی: ۵ آمپر؛ مقاومت فاز: ۰.۳۳ اهم
-
ثابت گشتاور: 0.096 نیوتن متر بر آمپر؛ اندوکتانس: 0.074 میلی هانری؛ جفت قطبها: 10
-
انکودر: مغناطیسی مطلق، ۱۷ بیتی؛ قابل انتخاب تکی/دوتایی
-
ارتباط: CAN (اختیاری EtherCAT)
-
قطر داخلی: ۱۸ میلیمتر؛ حفاظت: IP65
نسبت دنده به ازای هر (CRA-RI60-70-PRO-S-XX)
| نسبت | گشتاور اوج شروع/توقف (نیوتن متر) | حداکثر گشتاور پیوسته/میانگین (نیوتن متر) | گشتاور نامی در ۲۰۰۰ دور در دقیقه/نسبت (نیوتن متر) | سرعت خروجی اوج (دور در دقیقه) | سرعت نامی در ½ گشتاور نامی (دور در دقیقه) | واکنش معکوس (arcsec) |
|---|---|---|---|---|---|---|
| ۵۱ | ۴۲ | ۳۲ | ۱۹.۸ | ۸۲ | ۶۸ | ۲۰ |
| ۸۱ | ۵۳ | ۳۳ | ۲۷.۵ | ۵۱ | ۴۳ | ۲۰ |
| ۱۰۱ | ۶۶ | ۴۹ | ۳۰ | ۴۱ | ۳۴ | ۱۰ |
| ۱۰۲ | ۶۶ | ۴۹ | ۳۰ | ۳۲ | ۲۴ | ۱۰ |
فاکتور فرم &آمپر؛ اینرسی
-
استاندارد (-XX): طول ۷۰.۷ ± ۰.۵ میلیمتر؛ وزن ۰.۶۹ کیلوگرم؛ اینرسی روتور ۳۸۲ گرم بر سانتیمتر مربع
-
با ترمز (-XX-B): طول ۸۹.۷ ± ۰.۵ میلیمتر؛ وزن ۰.۸۴ کیلوگرم؛ اینرسی روتور ۵۳۸ گرم بر سانتیمتر مربع
سایر دادههای کاتالوگ
-
مقدار مرجع گشتاور نامی: 30 نیوتن متر
-
سرعت نامی معمول: 30 دور در دقیقه (وابسته به نسبت)
-
دمای کارکرد: تا 60 درجه سانتیگراد
-
نصب: نصب پیچی؛ رابط شفت کلیددار
نکات: انکودر تک/دوگانه، گزینه ترمز و نوع باس به صورت سفارشی قابل انتخاب هستند؛ EtherCAT در تصاویر با عنوان "Ether-cat" نشان داده شده است. تمام ابعاد و رتبهبندیهای فوق مستقیماً از برگههای ارائه شده برای CRA-RI60-70-PRO-S-XX و CRA-RI60-70-PRO-S-XX-B گرفته شدهاند.
کاربردها
-
بازوهای رباتیک صنعتی و مشارکتی ۶ محوره
-
مفاصل انساننما (شانه، آرنج، لگن، زانو)
-
اسکلتهای بیرونی و دستگاههای توانبخشی
-
گیمبالها/مکانیسمها و کنترلکنندههای نوری پهپاد
-
مکانیزمهای AGV/AMR، ماشینهای ابزار کوچک و اتوماسیون آزمایشگاهی
جزئیات
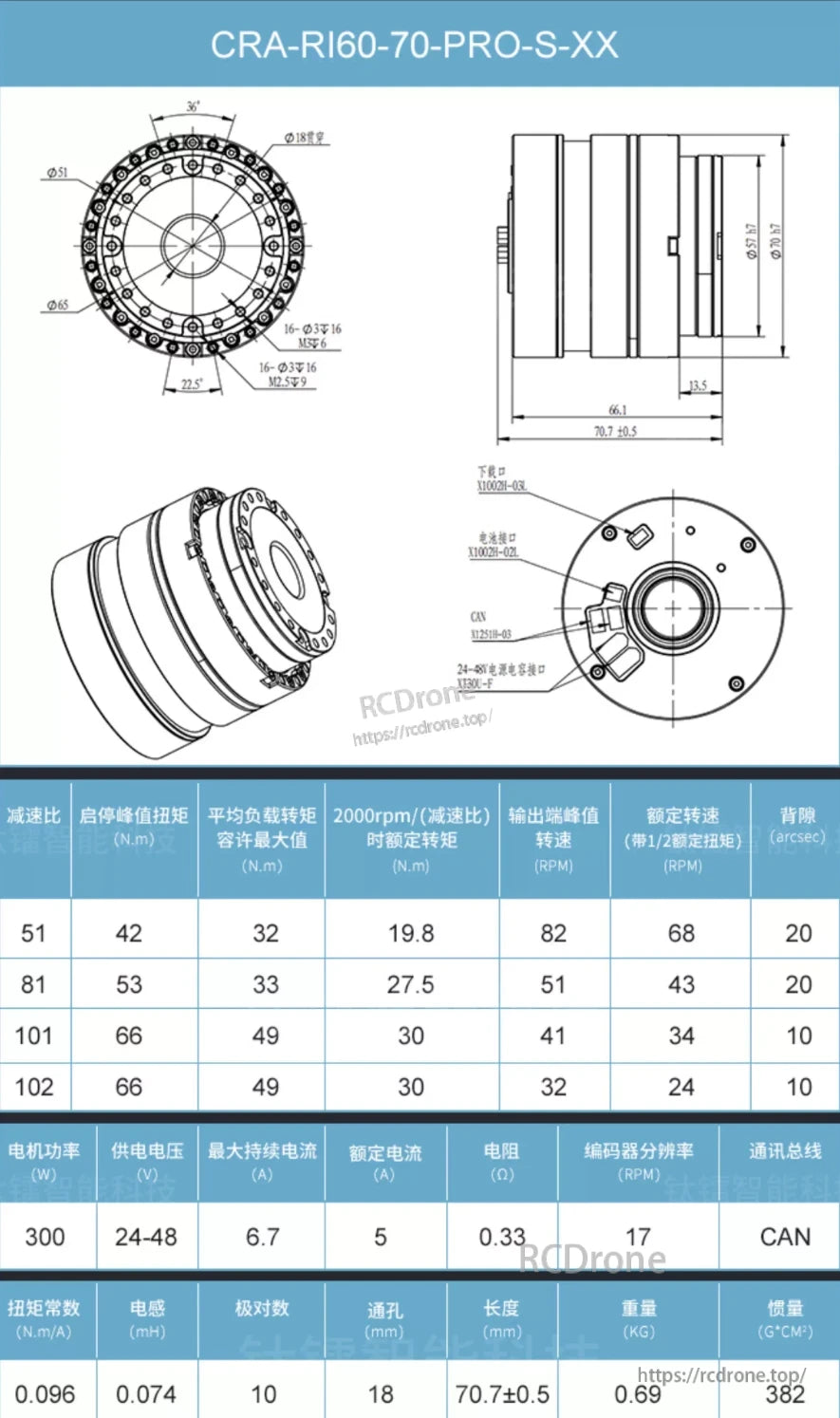
مشخصات محرک CRA-RI60-70-PRO-S-XX: موتور ۳۰۰ وات، ۲۴-۴۸ ولت، جریان نامی ۵ آمپر، وضوح انکودر ۱۷ دور در دقیقه، ارتباط CAN، وزن ۰.۶۹ کیلوگرم، اینرسی ۳۸۲ G·CM²، نسبت دندههای متعدد با دادههای گشتاور و سرعت.

مشخصات محرک CRA-RI60-70-PRO-S-XX-B: موتور ۳۰۰ وات، ۲۴-۴۸ ولت، جریان نامی ۵ آمپر، مقاومت ۰.۳۳ اهم، وضوح انکودر ۱۷ دور در دقیقه، گذرگاه CAN، وزن ۰.۸۴ کیلوگرم، اینرسی ۵۳۸ گیگا بر سانتیمتر مربع. ابعاد: طول ۸۹.۷±۰.۵ میلیمتر، قطر ۷۰.۳۷ میلیمتر.
Related Collections


