TI5 Robot CRA-RI60-80-PRO-XX ماژول مشترک یکپارچه ربات-درایو هارمونیک ، 24-48 ولت ، CAN/EtherCat ، رمزگذار 17 بیتی
TI5 Robot CRA-RI60-80-PRO-XX ماژول مشترک یکپارچه ربات-درایو هارمونیک ، 24-48 ولت ، CAN/EtherCat ، رمزگذار 17 بیتی
Ti5 Robot
در دسترس بودن پیکاپ بارگیری نشد
نمای کلی
ربات Ti5 CRA-RI60-80-PRO-XX یک مفصل یکپارچه فشرده و توخالی برای رباتهای انساننما، رباتهای همکار و رباتهای متحرک است. این مفصل ترکیبی از کاهنده هارمونیک فوق نازک، موتور گشتاور بدون فریم، سروو درایو FOC، و انکودر مغناطیسی مطلق در یک ماژول، ارائه خروجی با لقی نزدیک به صفر، سر و صدای کم و چگالی گشتاور بالا. تکیهگاههای مفصل میتوان یا اترکت، انکودرهای تکی یا دوتایی، و یک ترمز نگهدارنده اختیاریدو طول موجود است: استاندارد PRO-XX و مدل بلند PRO-XX-B (بدنه بلندتر، اینرسی روتور بالاتر، سوراخ عبوری بزرگتر).
ویژگیهای کلیدی
-
مفصل همه کاره: کاهنده هارمونیک + موتور گشتاور + درایور FOC + انکودر مطلق.
-
واکنش منفی نزدیک به صفر در خروجی؛ کنترل روان در سرعت پایین و نویز صوتی کم.
-
طراحی شفت توخالی برای عبور کابل/راه هوایی؛ نسبتهای کاهش چندگانه.
-
انکودر مطلق، ۱۷ بیتیحافظه موقعیت قطع برق؛ اختیاری رمزگذار دوگانه نسخه
-
ارتباطات: میتوان یا اترکت قابل انتخاب.
-
قدرت: ۲۴–۴۸ ولت، درایور یکپارچه، کلاس قدرت موتور ۳۰۰ وات.
-
ترمز نگهدارنده اختیاری; آی پی/ضد آب &آمپر؛ دمای پایین سفارشی سازی در دسترس است.
-
آماده برای استفاده برای گیمبالها، رباتهای انساننما، رباتهای همکار، تجهیزات صنعتی، رباتهای گشتی و دستگاههای دریایی.
مشخصات
برق &آمپلی فایر؛ کنترل (به اشتراک گذاشته شده توسط PRO-XX/PRO-XX-B)
-
قدرت موتور نامی: ۳۰۰ وات
-
ولتاژ تغذیه: ۲۴ تا ۴۸ ولت جریان مستقیم
-
حداکثر جریان مداوم: ۶.۷ آجریان نامی: ۵ الف
-
مقاومت فاز: ۰.۳۳ اهم
-
گشتاور ثابت: ۰.۰۹۶ نیوتن متر بر آمپر
-
اندوکتانس: ۰.۰۷۴ میلیهانری
-
جفت قطبها: ۱۰
-
رمزگذار: مطلق ۱۷ بیتیگزینههای انکودر تکی/دوتایی
-
اتوبوس: میتوان (استاندارد) یا اترکت (گزینه)
مکانیکی (هالو شفت)
-
سوراخ کامل (PRO-XX): قطر ۱۵ میلیمتر
-
سوراخ کامل (PRO-XX-B): Ø18 میلیمتر
-
طول (PRO-XX): ۷۰.۴ ± ۰.۵ میلیمتروزن ≈۱.۰۱ کیلوگرماینرسی روتور ۴۴۱ گرم بر سانتیمتر مربع
-
طول (PRO-XX-B): ۹۲.۹ ± ۰.۵ میلیمتروزن ۱.۱۷ کیلوگرماینرسی روتور ≈595 گرم بر سانتیمتر مربع
-
نصب: دایره پیچ جلویی (خروجی توخالی)؛ کاهنده هارمونیک یکپارچه
-
گزینهها: ترمز نگهدارنده؛ انکودر تکی/دوتایی؛ CAN/EtherCAT؛ ضد آب بودن &آمپر؛ بسته دمای پایین
گزینههای کاهنده &تقویتکننده؛ عملکرد (سمت خروجی)
لقی: کم ۱۰–۲۰ ثانیه قوسی بسته به نسبت.
| نسبت کاهش | گشتاور اوج شروع/توقف (نیوتن متر) | حداکثر گشتاور بار متوسط (نیوتن متر) | گشتاور نامی در ۲۰۰۰ دور در دقیقه/نسبت (نیوتن متر) | سرعت اوج (دور در دقیقه) | سرعت نامی در ½ گشتاور نامی (دور در دقیقه) | واکنش معکوس (arcsec) |
|---|---|---|---|---|---|---|
| ۵۱:۱ | ۴۲ | ۳۲ | ۱۹.۸ | ۸۲ | ۶۸ | ۲۰ |
| ۸۱:۱ | ۵۳ | ۳۳ | ۲۷.۵ | ۵۱ | ۴۳ | ۲۰ |
| ۱۰۱:۱ | ۶۶ | ۴۹ | ۳۰ | ۴۱ | ۳۴ | ۱۰ |
| ۱۲۱:۱ | ۶۶ | ۴۹ | ۳۰ | ۳۲ | ۲۴ | ۱۰ |
یادداشتها:
• دادههای فوق از روی برگههای محصول مربوط به CRA-RI60-80-PRO-XX خوانده شده و PRO-XX-B.
• PRO-XX-B از همان جدول گشتاور/سرعت استفاده میکند؛ با بدنه بلندتر، سوراخ عبوری بزرگتر و اینرسی بالاتری را فراهم میکند.
کاربردها
-
انساننما &رباتهای خدماتیمفاصل شانه، آرنج، لگن، زانو، مچ پا با چگالی گشتاور بالا.
-
بازوهای رباتیک مشارکتیمحورهای دقیق با لقی کم برای کنترل روان نیرو.
-
گیمبالها &آمپر؛ واحدهای شیب شیبردیابی آرام، پایدار و کمسرعت با حافظه موقعیت مطلق.
-
تجهیزات صنعتی &تقویتکنندهها؛ بازوهای مکانیکی AGV/AMR: محرک یکپارچه و جمع و جور برای فضاهای تنگ.
-
رباتهای گشت و بازرسی برقی; دستگاههای دریایی/کشتی (با قابلیت ضد آب بودن).
جزئیات
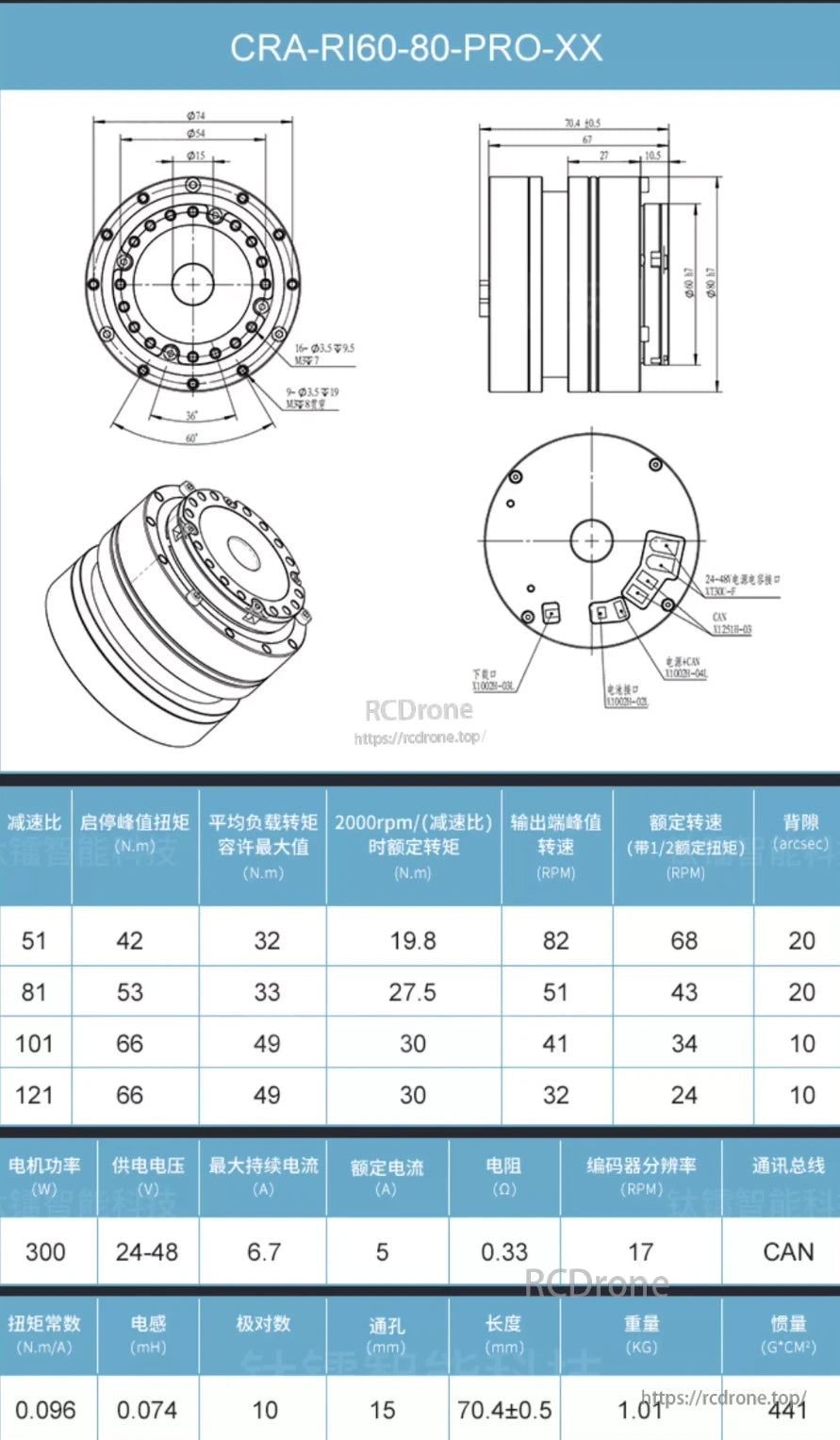
مشخصات ماژول مفصل ربات CRA-RI60-80-PRO-XX: موتور ۳۰۰ وات، ورودی ۲۴-۴۸ ولت، گذرگاه CAN، رمزگذار ۱۷ CPR، طول ۷۰.۴ میلیمتر، وزن ۱.۰۱ کیلوگرم، نسبتهای دنده چندگانه با دادههای گشتاور و سرعت ارائه شده.
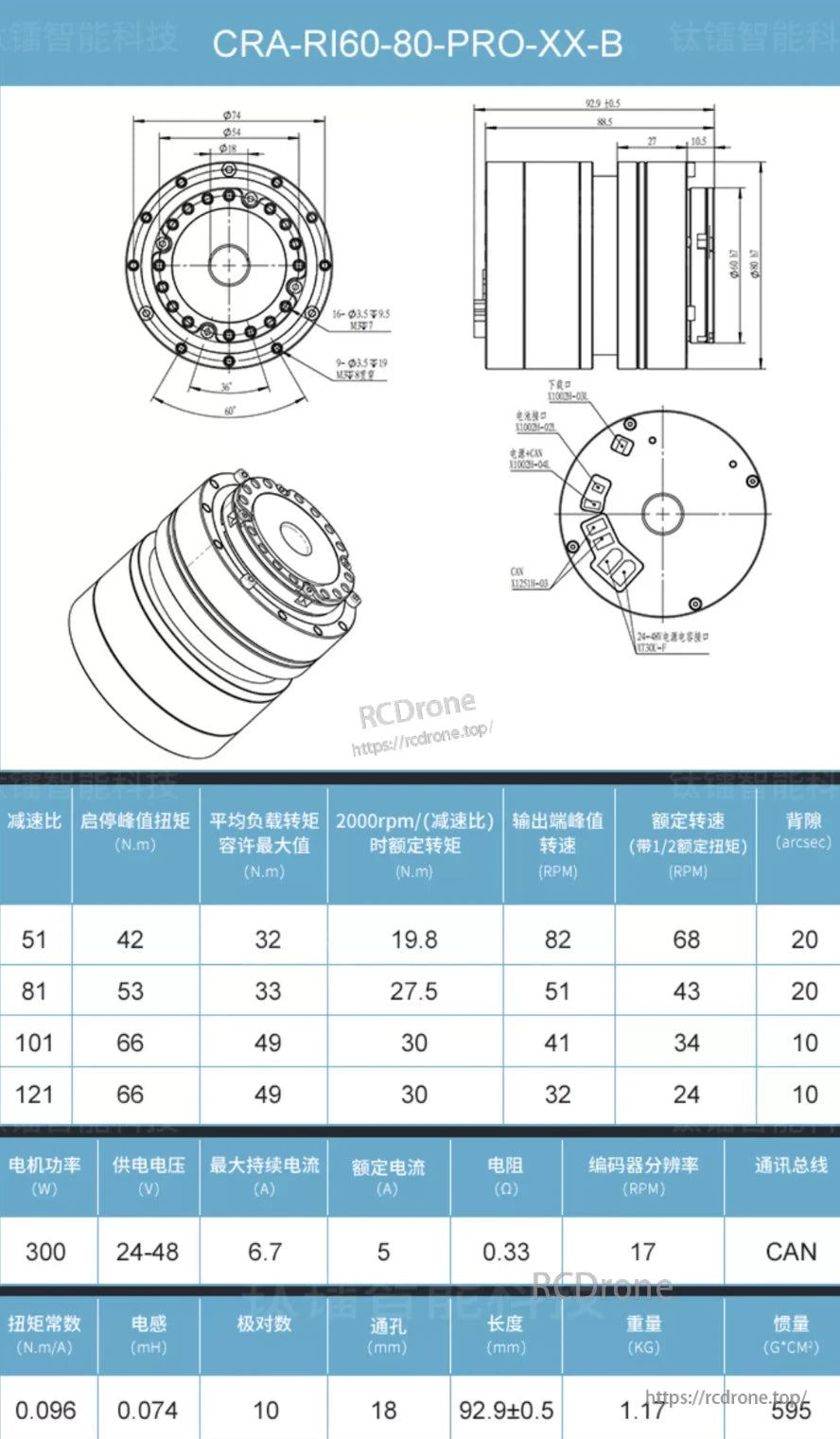
ماژول اتصال ربات CRA-RI60-80-PRO-XX-B با موتور 300 وات، تغذیه 24-48 ولت، ارتباط CAN، دقت انکودر 17 دور در دقیقه و نسبت دندههای مختلف. مشخصات کلیدی شامل گشتاور، سرعت، جریان و ابعاد است.
Related Collections