







ماژول مفصل موتور Ti5 ROBOT CRA-RI60-80-PRO، ۳۰۰ وات ۲۴-۴۸ ولت، انکودر ۱۶ بیتی، نسبت کاهش ۵۱/۸۱/۱۰۱/۱۲۱
ماژول مفصل موتور Ti5 ROBOT CRA-RI60-80-PRO، ۳۰۰ وات ۲۴-۴۸ ولت، انکودر ۱۶ بیتی، نسبت کاهش ۵۱/۸۱/۱۰۱/۱۲۱
Ti5 ROBOT
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
موتور Ti5 ROBOT CRA-RI60-80-PRO یک موتور ماژولار سبک وزن است که برای کاربردهای مفصل رباتیک یکپارچه طراحی شده است و موتور، انکودر و کاهندههای هارمونیک را در یک ساختار فشرده ترکیب میکند. این موتور در مدلهای CRA-RI60-80-PRO-XX و CRA-RI60-80-PRO-XX-B با گزینههای مختلف نسبت کاهش موجود است.
این ماژول مفصلی بر طراحی سبک و ماژولار تأکید دارد. متن های برجسته شامل: “ماژول مفصلی سبک وزن” و “کلید پیشرفت سختافزاری اصلی” است. متن ویژگیهای اضافی شامل: “اندازه کوچک، عملکرد قدرتمند”، “فوقالعاده سبک”، “عملکرد قویتر” و “ماژولارization” است.
برای انتخاب و پشتیبانی یکپارچهسازی پیشفروش، با https://rcdrone.top/ تماس بگیرید یا به ایمیل [email protected].
ویژگیهای کلیدی
- سبک وزن: “فوقالعاده سبک با استانداردهای کاربری قویتر”; “کاهش وزن بیش از 1/3”; “بهطور قابلتوجهی مصرف انرژی عملیاتی را کاهش دهید”.
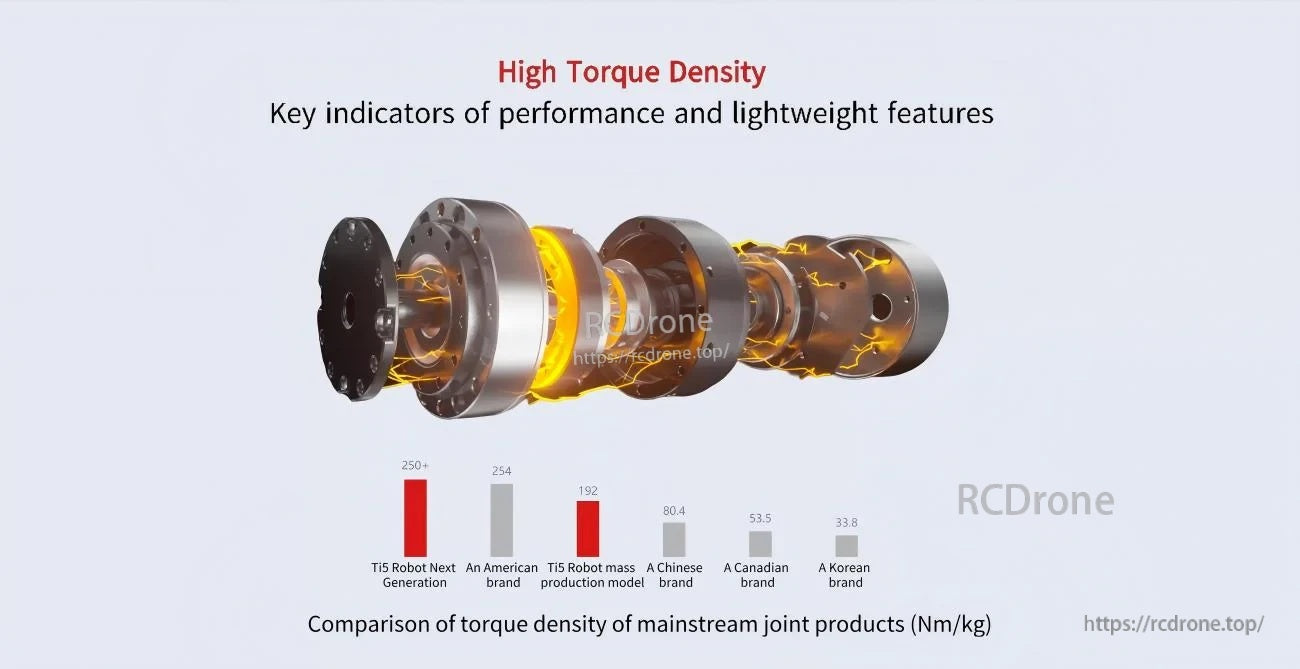
- موقعیتیابی عملکرد: “چگالی گشتاور دو برابر محصولات مشابه است.”
- مدولارization: “شش ماژول بهطور ارگانیک ادغام شدهاند”; “سه سری میتوانند بهطور جامع به مشتریان در سناریوهای مختلف سازگار شوند”; “بهطور قابلتوجهی سختی تولید را کاهش داده و کارایی تولید را بهبود میبخشند.”
- ترکیب ماژول (قطعات برچسبگذاری شده): پوشش پشتی موتور; برد کنترل; انکودر; محفظه استاتور; روتور موتور; استاتور موتور; کاهندههای هارمونیک; پوشش فلکساسپلاین.
- برچسب نمودار مقایسهای: “مقایسه چگالی گشتاور محصولات مشترک اصلی (Nm/kg)” با مقادیر نشان داده شده: 250+ (نسل بعدی ربات Ti5)، 254 (یک برند آمریکایی)، 192 (مدل تولید انبوه ربات Ti5)، 80.۴ (یک برند چینی)، ۵۳.۵ (یک برند کانادایی)، ۳۳.۸ (یک برند کرهای).
- متن اضافی: “مزیت تولید انبوه پیشرو در صنعت.” “تمام سختافزارهای زیرین قابل کنترل هستند و نرخ بومیسازی میتواند به ۱۰۰٪ برسد.” “دارای یک زنجیره ابزار نرمافزاری کامل برای توسعه ربات، که به تسریع تحقیق و توسعه کمک میکند.”
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اکسوسکلتونها
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
مشخصات
| پارامتر | مقدار |
|---|---|
| مدل موتور | CRA-RI60-80-PRO-XX / CRA-RI60-80-PRO-XX-B |
| نسبت کاهش | 51 / 81 / 101 / 121 |
| گشتاور اوج شروع و توقف | 42 / 53 / 66 / 66 N.m |
| حداکثر گشتاور بار متوسط مجاز | 32 / 33 / 49 / 49 N.m |
| گشتاور نامی در این سرعت 2000 دور در دقیقه/(نسبت کاهش) | 19.8 / 27.۵ / ۳۰ / ۳۰ N·m |
| حداکثر سرعت چرخش در انتهای خروجی | ۸۲ / ۵۱ / ۴۱ / ۳۲ RPM |
| سرعت نامی | ۶۸ / ۴۳ / ۳۴ / ۲۴ RPM |
| قدرت موتور | ۳۰۰ W |
| ولتاژ تأمین | ۲۴-۴۸ V |
| حداکثر جریان مداوم | ۶.۷ A |
| جریان نامی | ۵ A |
| دقت انکودر | ۱۶ بیت |
| فاصله پشتی | ۲۰ / ۲۰ / ۱۰ / ۱۰ / ۱۰ arcsec |
| ثابت گشتاور | ۰.۰۹۶ N·m/A |
| سوراخ | ۱۸ mm |
| طول: بدون ترمز / با ترمز | ۷۲.۵±۰.۵ mm / ۹۱.۵±۰.۵ mm |
| وزن: بدون ترمز / با ترمز | ۱.۰۳ kg / ۱.2 کیلوگرم |
| اینرسی: بدون ترمز / با ترمز | 394.8 گرم·سانتیمتر² / 492 گرم·سانتیمتر² |
راهنماها
ابعاد نصب موتور CRA-RI60-80-PRO Drawing.pdf
جزئیات

موتورهای ماژول جمع و جور طراحی شده برای مفاصل رباتیک یکپارچه، که موتور، انکودر و کاهشدهنده هارمونیک را در یک واحد ترکیب میکند.



معماری ماژول یکپارچه اجزای کلیدی را گرد هم میآورد—برد کنترل، انکودر، هسته موتور و کاهشدهنده هارمونیک—برای ادغام آسانتر.
چگالی گشتاور بالا به ارائه خروجی قوی در یک مفصل سبک کمک میکند و از انساننماها، بازوهای رباتیک، اسکلتهای خارجی و رباتهای چهارپا پشتیبانی میکند.
Related Collections







