







ماژول مفصل موتور Ti5 ROBOT CRA-RI70-90-PRO توان ۵۰۰ وات، ولتاژ ۲۴-۴۸ ولت، انکودر ۱۶ بیت، نسبت ۵۱/۸۱/۱۰۱/۱۲۱
ماژول مفصل موتور Ti5 ROBOT CRA-RI70-90-PRO توان ۵۰۰ وات، ولتاژ ۲۴-۴۸ ولت، انکودر ۱۶ بیت، نسبت ۵۱/۸۱/۱۰۱/۱۲۱
Ti5 ROBOT
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
موتور Ti5 ROBOT CRA-RI70-90-PRO یک موتور ماژولار سبک برای عملگرهای مفصلی رباتیک طراحی شده است. این ماژول اجزای کلیدی مفصل مانند برد کنترل، انکودر و کاهندههای هارمونیک را برای ادغام سیستم رباتیک فشرده ترکیب میکند.
ویژگیهای کلیدی
- ماژول مفصلی سبک
- اندازه کوچک، عملکرد قدرتمند
- مفهوم ماژولارization
- مزیت تولید انبوه پیشرو در صنعت (بیان شده)
- تمامی سختافزارهای زیرین قابل کنترل هستند و نرخ محلیسازی میتواند به 100% برسد (بیان شده)
- زنجیره ابزار نرمافزاری کامل برای توسعه ربات به منظور تسریع در تحقیق و توسعه (بیان شده)
اجزای ماژول داخلی (برچسبهای نمای انفجاری)
- 1. درپوش پشتی موتور
- 2. برد کنترل
- 3. انکودر
- 4. محفظه استاتور
- 5. روتور موتور
- 6. استاتور موتور
- 7. کاهندههای هارمونیک
- 8. پوشش فلکساسپلاین
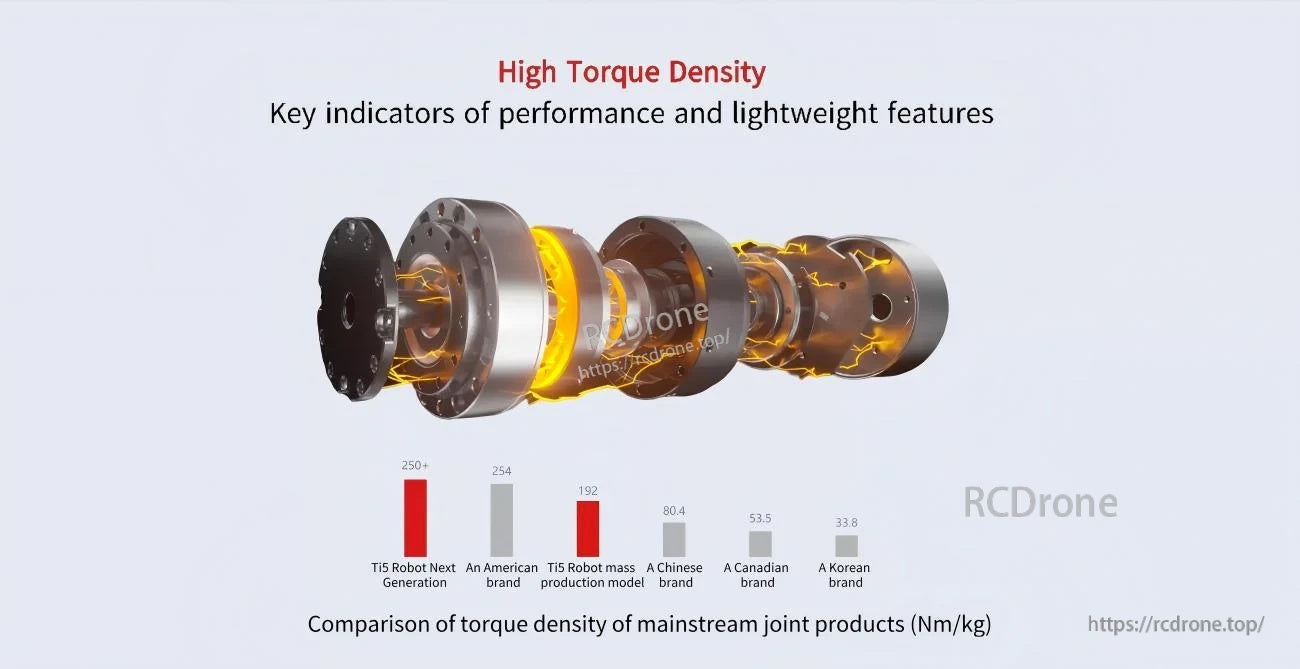
متن مقایسه چگالی گشتاور (همانطور که نشان داده شده است)
مقایسه چگالی گشتاور محصولات مشترک اصلی (Nm/kg)
- ربات Ti5 نسل بعد: 250+
- یک برند آمریکایی: 254
- مدل تولید انبوه ربات Ti5: 192
- یک برند چینی: 80.4
- یک برند کانادایی: 53.5
- یک برند کرهای: 33. 8
مشخصات
| پارامتر | مقدار |
|---|---|
| مدل موتور | CRA-RI70-90-PRO-XX / CRA-RI70-90-PRO-XX-B |
| نسبت کاهش | 51 / 81 / 101 / 121 |
| گشتاور اوج شروع و توقف | 69 / 91 / 102 / 108 N.m |
| گشتاور بار متوسط مجاز حداکثر | 42 / 58 / 61 / 61 N.m |
| گشتاور نامی در این سرعت 2000 دور در دقیقه/(نسبت کاهش) | 32 / 42 / 50 / 50 N·m |
| سرعت چرخش اوج خروجی | 77 / 48 / 40 / 30 RPM |
| سرعت نامی | 61 / 38 / 30 / 25 RPM |
| قدرت موتور | 500 W |
| ولتاژ تغذیه | 24-48 V |
| حداکثر جریان پیوسته | 8.۴ A |
| جریان نامی | ۶.۱ A |
| دقت انکودر | ۱۶ بیت |
| فاصله پشتی | ۲۰ / ۲۰ / ۱۰ / ۱۰ / ۱۰ ثانیه قوسی |
| ثابت گشتاور | ۰.۱۱۸ N·m/A |
| سوراخ | ۱۸ mm |
| طول: بدون ترمز / با ترمز | ۷۳.۵ ± ۰.۵ mm / ۹۲ ± ۰.۵ mm |
| وزن: بدون ترمز / با ترمز | ۱.۲۷ kg / ۱.۵ kg |
| اینرسی: بدون ترمز / با ترمز | ۵۹۶.۴ g·cm² / ۷۴۶.۷ g·cm² |
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اکسوسکلتونها
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
راهنماها
برای راهنمایی در انتخاب نسبتهای کاهش و گزینههای ترمز، با [email protected] or تماس بگیرید https://rcdrone.top/.
جزئیات

طراحی ماژول مفصل فشرده برای رباتهایی که وزن کم و ادغام بالا اهمیت دارد.

یک ساختار ماژولار سختافزار کلیدی مفصل را ادغام میکند تا ادغام سیستم رباتیک را ساده کند.


اجزای اصلی در یک ماژول ساخته شدهاند، از جمله برد کنترل، انکودر ۱۶ بیتی و کاهنده هارمونیک.
جدول مقایسه چگالی گشتاور برای ارزیابی سریع در میان ماژولهای اصلی اتصال ارائه شده است.
Related Collections







