




ماژول GPS UBLOX M10G-5883 با قطبنمای QMC5883L | GNSS با فرکانس ۱۰ هرتز، حافظه فلش، سازگار با Betaflight، INAV و Ardupilot
ماژول GPS UBLOX M10G-5883 با قطبنمای QMC5883L | GNSS با فرکانس ۱۰ هرتز، حافظه فلش، سازگار با Betaflight، INAV و Ardupilot
RCDrone
در دسترس بودن پیکاپ بارگیری نشد
ماژول UBLOX M10G-5883 GPS یک واحد GNSS با عملکرد بالا است که از جدیدترین چیپست ماهوارهای u-blox M10 (M10050) و قطبنمای دیجیتال QMC5883L بهره میبرد و دقت موقعیتیابی استثنایی، سرعت بالای دستیابی و ردیابی سیگنال قوی را ارائه میدهد. این ماژول از GPS، GLONASS، Galileo، BeiDou، QZSS و SBAS پشتیبانی میکند و میتواند به حداکثر 32 ماهواره قفل شود و دادههای موقعیتیابی را با سرعت حداکثر 10Hz خروجی دهد و دقتی در سطح سانتیمتر را در کاربردهای واقعی در فضای باز ارائه میکند.
🔧 ویژگیهای کلیدی
-
چیپ GNSS: UBLOX M10050 (نسل دهم)
-
سنسور قطبنما: مغناطیسسنج دیجیتال با دقت بالا QMC5883L
-
نرخ بهروزرسانی: 10Hz
-
پشتیبانی از ماهواره:
-
GPS L1 C/A
-
GLONASS L1OF
-
BeiDou B1I/B1C
-
Galileo E1B/C
-
QZSS L1 C/A/S
-
SBAS L1 C/A
-
-
حداکثر ردیابی ماهواره: 32
-
شروع سرد: ~26 ثانیه | شروع داغ: ~1 ثانیه
-
دقت موقعیت: 1.5m CEP (محیط ایده آل)
-
حساسیت:
-
ردیابی: -167dBm
-
دوبارهگیری: -160dBm
-
شروع داغ: -159dBm
-
شروع سرد: -148dBm
-
-
پروتکل خروجی: NMEA, UBX
-
نرخ Baud: 4800 – 921600 bps (پیشفرض: 38400bps)
-
سطح خروجی: 3.3V TTL
📐 مشخصات سختافزاری
| پارامتر | مقدار |
|---|---|
| ابعاد | 20 x 20 x 8 mm (ماژول GPS) |
| آنتن سرامیکی | 18 x 18 x 4 mm سرامیک وارداتی |
| وزن | 7g |
| دامنه ولتاژ | 3.6V – 5.5V (معمولاً 5V) |
| جریان مصرفی | 35mA @ 5V |
| کانکتور | SH1.0 6-pin، فاصله 1.0mm |
| شاخص LED PPS | آبی روشن هنگام روشن بودن، فلاش 3D fix |
📦 شامل در بسته
-
1x ماژول GPS UBLOX M10G-5883
-
1x SH1.0 کابل سیگنال سیلیکونی 20 سانتیمتری 6 پین
🔄 تنوعها
-
CX018 با فلش، بدون قطبنما
-
CX20 با فلش و قطبنمای IST8310
-
CX28 با فلش و قطبنمای IST8310
-
CX28 با فلش، بدون قطبنما
🛠️ سازگاری نرمافزار
بهطور کامل پشتیبانی میشود توسط:
-
Betaflight ≥ v4.3.0
-
INAV ≥ v5.0.0
-
Ardupilot ≥ v4.1
-
PX4 با پیکربندی “ROTATION_ROLL_180”
🔌 پیکربندی پینها (SH1.0 6-pin)
| پین | عملکرد |
|---|---|
| G | GND |
| V | 5V |
| R | RX |
| T | TX |
| C | SCL |
| D | SDA |
RX به FC TX متصل میشود، TX به FC RX متصل میشود. تمام I2C و UART در سطح 3.3V TTL هستند.
✅ یادداشتهای نصب
-
قطبنما را با پیکان رو به جلو در جهت دماغه پهپاد نصب کنید.
-
استفاده از پیکربندی:
-
بتافلایت: چرخش ۱۸۰° به سمت ساعت
-
آردوپایلوت: COMPASS_AUTO_ROT = 2
-
PX4 (QGC): ROTATION_ROLL_180
-
🛰️ ایدهآل برای
-
هواپیماهای بدون سرنشین مسابقهای FPV
-
هواپیماهای سینهوپ و توتپیک
-
هواپیماهای بدون سرنشین بال ثابت سبک
-
مولتیروتورهای حرفهای که به دادههای دقیق GPS و هدینگ مغناطیسی نیاز دارند
این ماژول UBLOX M10G-5883 یک ارتقاء قدرتمند از M8N است که شروعهای سرد سریعتر، دقت بهبود یافته و سازگاری گسترده با استکهای پروازی متنباز اصلی را ارائه میدهد.این دستگاه از حفظ پیکربندی حتی پس از خاموش شدن پشتیبانی میکند و تنظیمات پایدار را در طول راهاندازی مجدد و تعویض کنترلکننده پرواز امکانپذیر میسازد.
جزئیات
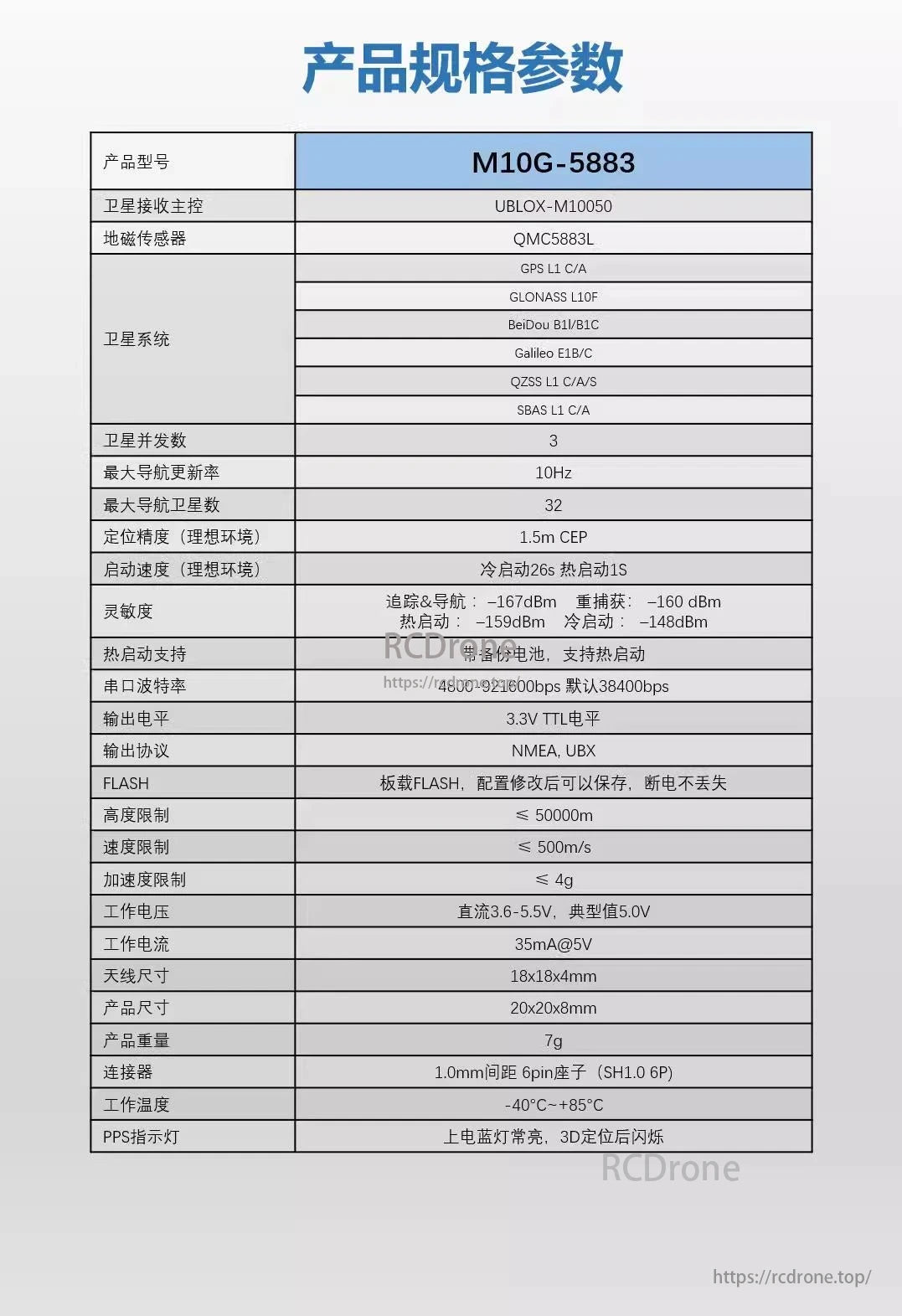
ماژول GPS M10G-5883 از چندین سیستم ماهوارهای با دقت 1.5 متر CEP، نرخ بهروزرسانی 10Hz، حساسیت -167dBm، ردیابی 32 کاناله، خروجی TTL 3.3V پشتیبانی میکند و در دماهای -40 درجه سانتیگراد تا +85 درجه سانتیگراد کار میکند.
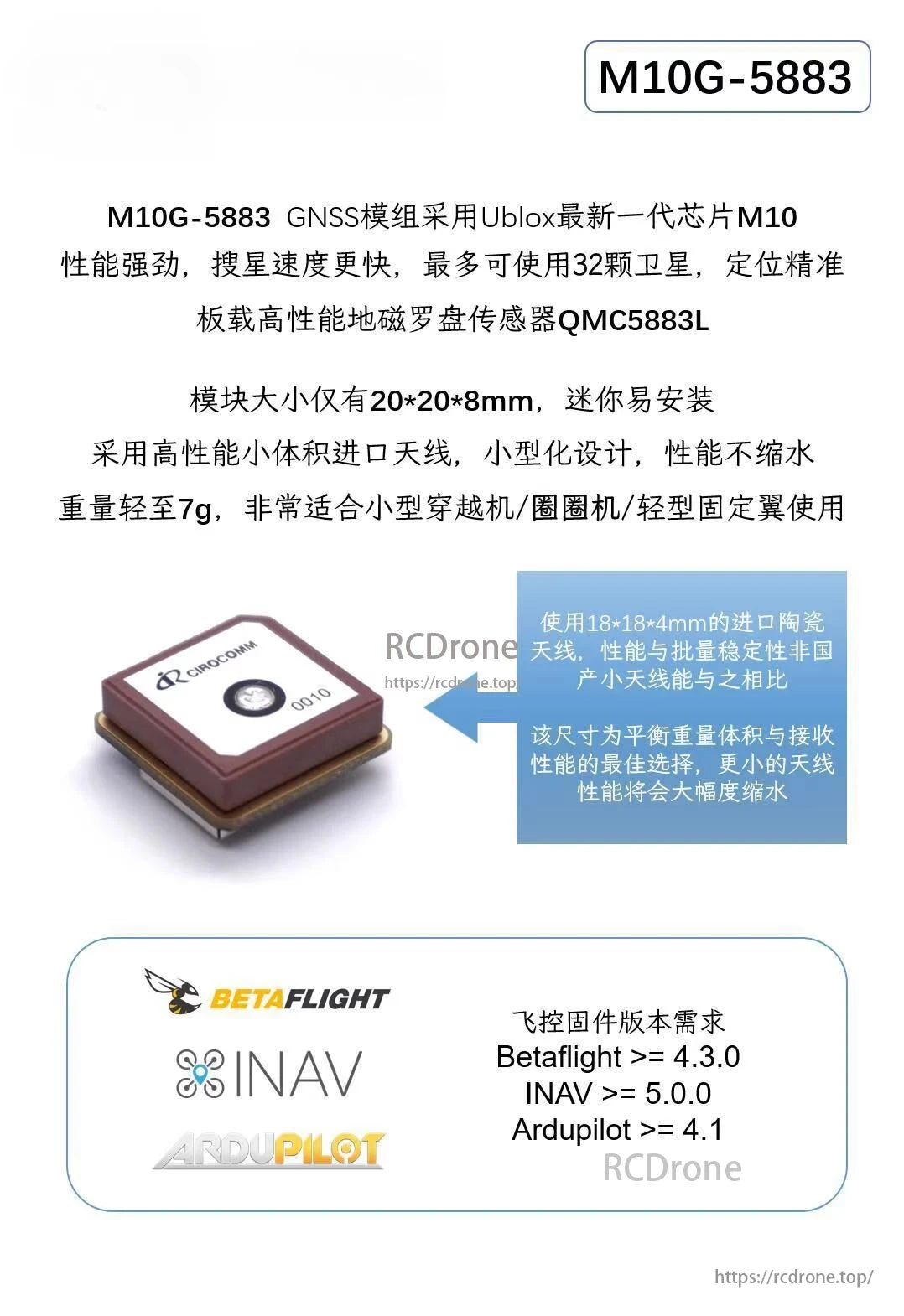
ماژول GNSS M10G-5883 از چیپ Ublox M10 استفاده میکند و از 32 ماهواره برای موقعیتیابی دقیق پشتیبانی میکند. این ماژول دارای قطبنمای QMC5883L، اندازه جمع و جور 20x20x8mm و وزن سبک 7 گرم است که برای پهپادهای کوچک ایدهآل است. نیاز به Betaflight >= 4.3.0، INAV >= 5.0.0، Ardupilot >= 4.1 دارد.

راهنمای تنظیم GPS M10G-5883 برای INAV. GPS را به یک پورت سریال موجود متصل کنید، GPS را در پیکربندی فعال کنید و کنترلکننده پرواز را مجدداً راهاندازی کنید. عملکرد GPS را در فضای باز تأیید کنید.
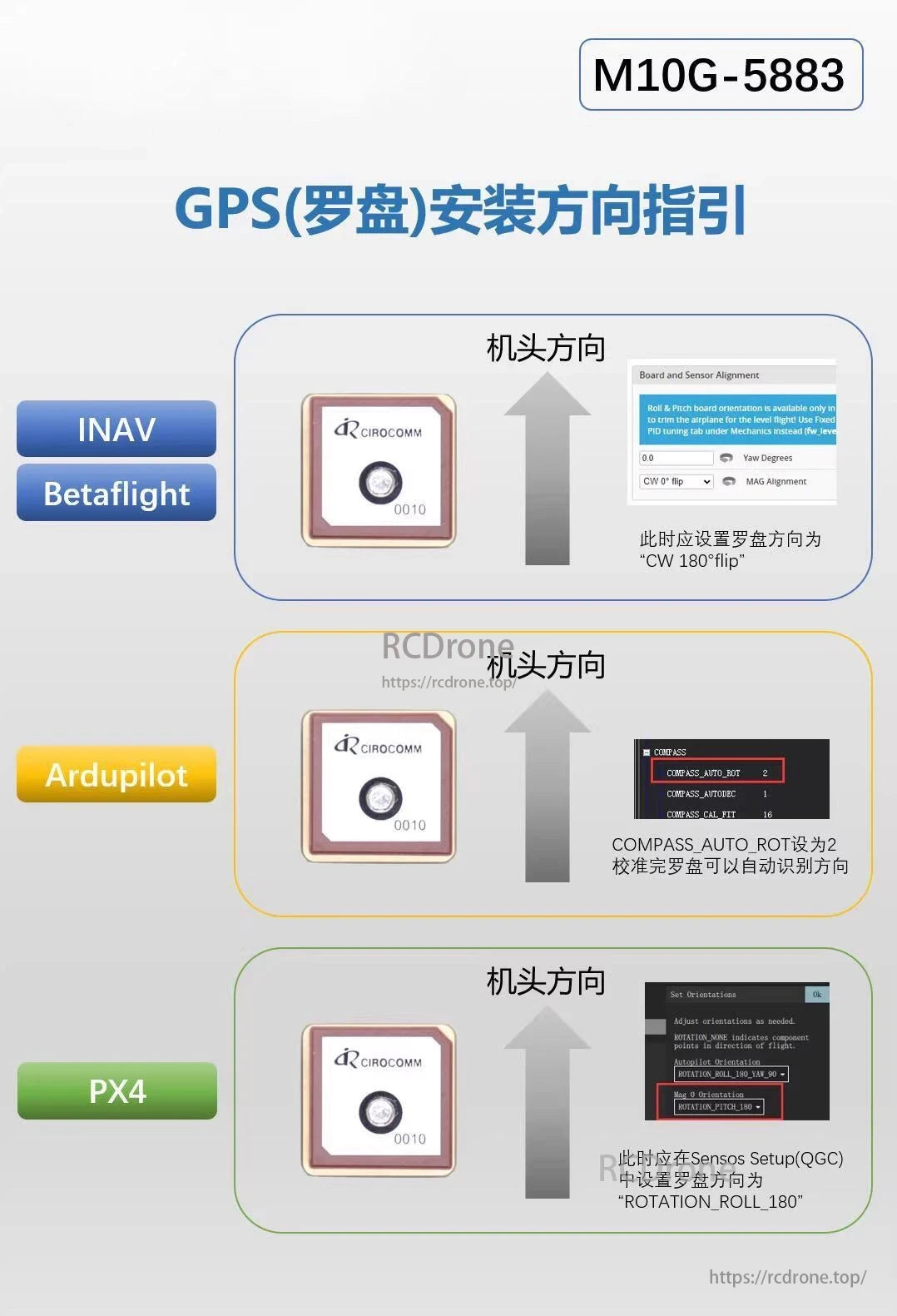
راهنمای نصب GPS برای INAV، Betaflight، Ardupilot و PX4. شامل تنظیمات تراز قطبنما برای بهینهسازی جهتگیری و عملکرد پهپاد.
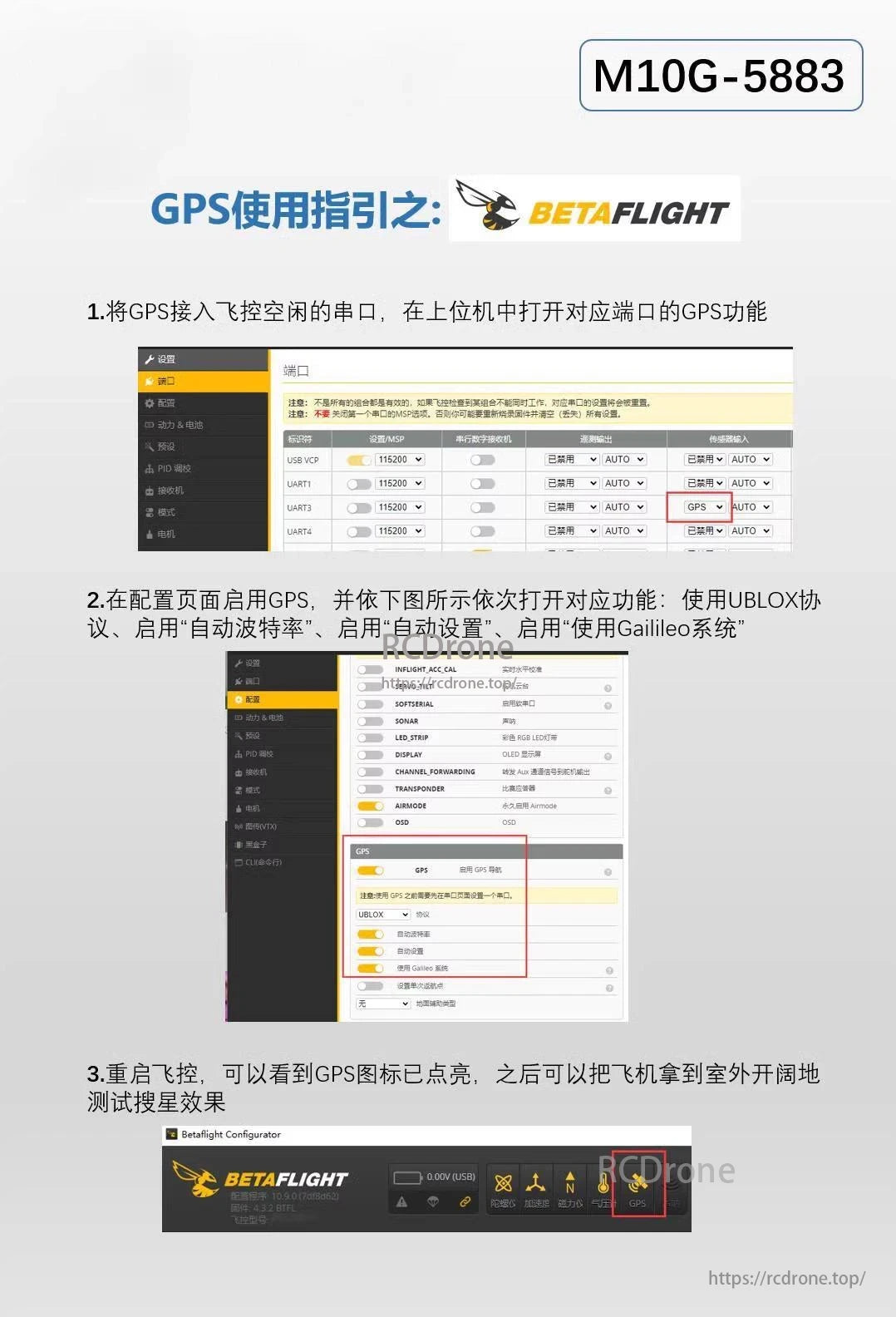
راهنمای تنظیم GPS M10G-5883 برای Betaflight. GPS را به پورت سریال آزاد متصل کنید، عملکرد GPS را فعال کنید، پروتکل UBLOX را تنظیم کنید، نرخ اتوماتیک باود، تنظیمات اتوماتیک و سیستم گالیله را انتخاب کنید. برای فعالسازی آیکون GPS، دستگاه را ریستارت کنید.
Related Collections




