








ویموشن HWT601-AGV-485 IMU RS485 مدباس، IP67، 200 هرتز – شتابسنج، ژیروسکوپ و شیبسنج ۶ محوره، سازگار با ROS/Matlab
ویموشن HWT601-AGV-485 IMU RS485 مدباس، IP67، 200 هرتز – شتابسنج، ژیروسکوپ و شیبسنج ۶ محوره، سازگار با ROS/Matlab
WitMotion
در دسترس بودن پیکاپ بارگیری نشد
مروری بر محصول
سنسور WitMotion HWT601-AGV-485 یک سنسور 6 محوره برای اندازهگیری وضعیت/جهت است که برای رباتهای AGV، پهپادها و پلتفرمهای خودران طراحی شده است. این سنسور شتابسنج 3 محوره + سرعت زاویهای 3 محوره را ترکیب کرده و زاویه 3 محوره &و کواترنیون را از طریق RS485 (Modbus) با حداکثر فرکانس 200 هرتز خروجی میدهد. این ماژول دارای فیلتر دینامیک کالمن، کالیبراسیون دقیق صفحه گردان، دریافت偏سنجی خودکار/دستی، منبع پشتیبان برای ذخیرهسازی جهت در صورت خاموشی و یک IP67 بدنه ضد آب/ضد گرد و غبار است. همچنین از زنجیره چند سطحی (تا 32 واحد) برای اندازهگیری وضعیت همزمان پشتیبانی میکند.
ویژگیهای کلیدی
-
زاویه با دقت بالا: دقت XY 0.1°; دقت Z 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485).
-
偏差 ژیروسکوپ پایدار: XY 5°/h; Z 2°/h (HWT601-AGV-485) / 5°/h (WT601-AGV-485).
-
ورودی وسیع 9–36 V, جریان عملیاتی ≈ 8 mA @12 V.
-
RS485 Modbus, baud 4,800–230,400 bps.
-
نمونهبرداری: خواندن درخواست–پاسخ تا 200 Hz.
-
الگوریتم: ادغام فیلتر کالمن و الگوریتم هدایت AGV اختصاصی.
-
نرمافزار: مجموعه رایگان PC با داشبوردهای زنده، نمودارهای منحنی، تجسم 3D (خودرو/کره/مکعب/هواپیما)، پیکربندی (偏差، مرجع زاویه، کالیبراسیون شتاب، عوامل مقیاس)، ضبط داده &و ذخیرهسازی مستقیم، و واردات Matlab.
-
دوستانه برای توسعهدهندگان: برنامههای نمونه و پشتیبانی کد برای ROS، لینوکس، C/C#، پایتون.
-
محیطی: IP67، -40~80 °C (متغیر جدول -40~85 °C نشان داده شده است).
-
زنجیرهای: تا 32 حسگر بر روی RS485 برای اندازهگیری همزمان وضعیت.
راهنمای نصب
-
حسگر را بر روی یک سطح محکم، صاف و پایدار نصب کنید؛ پایههای ناهموار باعث خطای زاویه میشوند (به شکل 1–2 مراجعه کنید).
-
محور حسگر را موازی با محور اندازهگیری نگه دارید؛ از زوایای بین محوری پرهیز کنید (به شکل 3–4 مراجعه کنید).
-
این مدل فقط نصب افقی را پشتیبانی میکند.
html
نرمافزار &و تجسم
-
داشبورد دادههای قدرتمند (زاویهها، نرخ، شتاب، مغناطیس، کواترنیون، پورتها، دما، ولتاژ و غیره).
-
پنل پیکربندی: نرخ Baud، آدرس دستگاه، دریافت خودکار بایاس، بازنشانی محور Z، کالیبراسیون شتاب، مرجع زاویه، کالیبراسیون مثبت/منفی دستی و عوامل مقیاس.
-
مدلهای 3D برای نظارت بر حرکت بصری و نمودارهای زمان واقعی با بهروزرسانیهای پویا.
-
نمایش دادههای خام و ذخیرهسازی فایل برای جمعآوری آسان؛ تحلیل Matlab وارد شده پشتیبانی میشود.
-
دموهای ROS IMU INS: تجسم ردیابی وضعیت و نمایش دادههای وضعیت (چرخش/غلت/زاویه، سرعت زاویهای، شتاب خطی).
html
مشخصات
رابط &و عملکرد
| مورد | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| رابط / پروتکل | RS485 / Modbus | RS485 / Modbus |
| نرخ Baud | 4,800–230,400 bps | 4,800–230,400 bps |
| دادههای خروجی | شتابسنجی 3 محور، سرعت زاویهای، زاویه، کواترنیون | یکسان |
| فرکانس نمونهبرداری | تا 200 هرتز (درخواست–پاسخ) | تا 200 هرتز |
| دقت زاویه XY | 0.1° | 0. 1° |
| دقت زاویه Z (خطای چرخش ۳۶۰°) | 0.1° | 0.15° |
| محدوده شتاب / دقت | ±4 g / 0.0001 g/LSB | همان |
| محدوده ژیروسکوپ / دقت | ±250 °/s / 0.0122 (°/s)/LSB | همان |
| محدوده زاویه / دقت | XZ: ±180°; Y: ±90° / 0.0059° | همان |
| بیثباتی انحراف ژیروسکوپ (XY / Z) | 5°/ساعت / 2°/ساعت | 5°/ساعت / 5°/ساعت |
| ضریب دما (XYZ) | 0.002°/°C | 0.002°/°C |
برق، مکانیک &و محیط
-
ولتاژ تامین: 9–36 V; جریان عملیاتی: ≈ 8 mA (12 V)
-
ابعاد: 55 × 36.8 × 24 mm; طول کابل: 1 متر
-
محافظت: IP67
-
دمای کار: -40~80 °C (نوع جدول همچنین نشان میدهد -40~85 °C)
-
نصب: فقط نصب افقی
-
زنجیرهای: تا 32 واحد بر روی RS485
حوزههای کاربرد
AGV/AMR و رباتهای متحرک، پهپادها/UAVها، وسایل نقلیه لجستیک بدون سرنشین و ماژولهای ادراک رانندگی خودران.
نامگذاری مدل &و انتخاب
-
HWT601-AGV-485 – دقت بالاتر محور Z (0.1°) و ناپایداری کمتری در انحراف Z (2°/h).
html -
WT601-AGV-485 – مشخصات استاندارد محور Z (0.15°, 5°/h).
HWT601 را زمانی که دقت در هدینگ Z حیاتی است انتخاب کنید.
جزئیات

حسگر وضعیت 6 محوره با دقت بالا با شتابسنج 3 محوره، سرعت زاویهای، زاویه و کواترنیون. دارای الگوریتم هدینگ AGV، حفاظت IP67، فیلتر کالمن، بهدستآوری خودکار انحراف و پشتیبانی از نرمافزار PC.
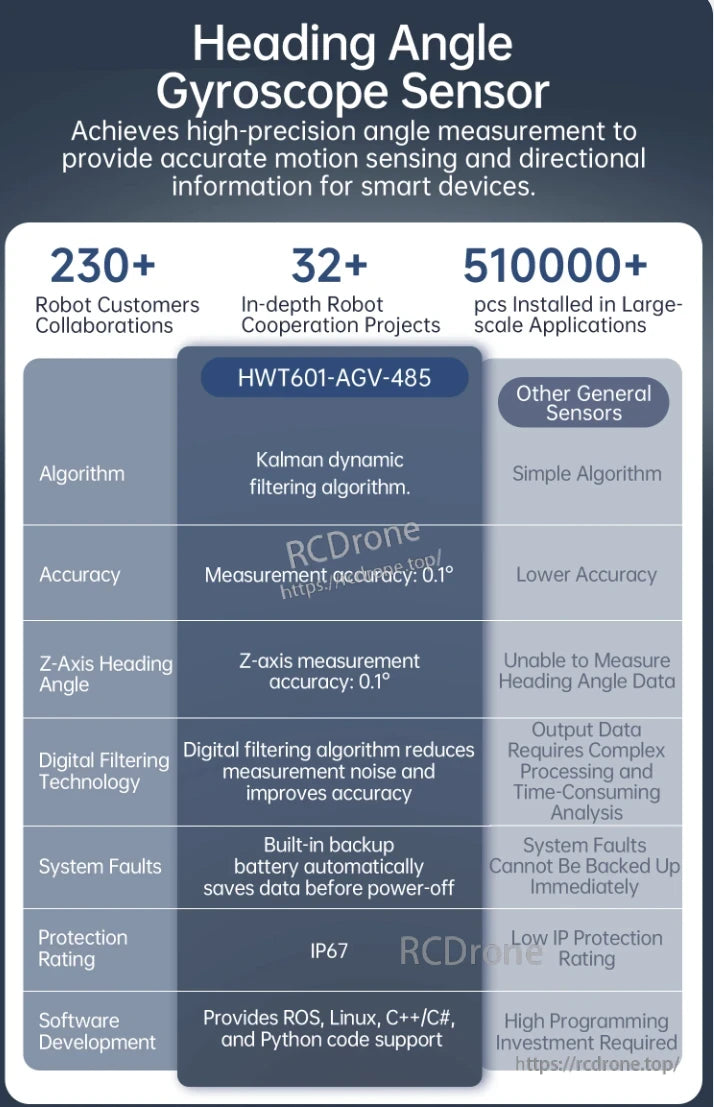
حسگر ژیروسکوپ زاویه هد HWT601-AGV-485 اندازهگیری زاویه با دقت بالا را با فیلتر کالمن، دقت 0.1°، کاهش نویز دیجیتال، حفاظت IP67 ارائه میدهد و از ROS، Linux، C++ و Python پشتیبانی میکند. بیش از 230 همکاری ربات و بیش از 510,000 نصب.
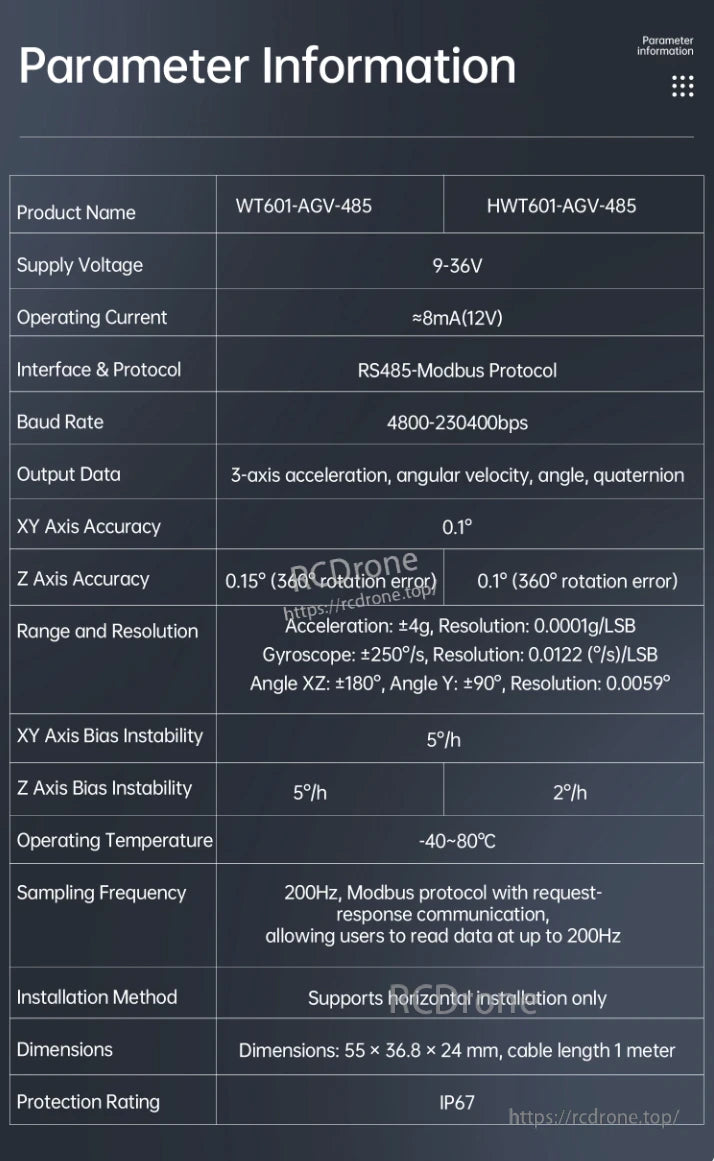
IMU مدل HWT601-AGV دارای منبع تغذیه 9-36V، RS485-Modbus، نمونهبرداری 200Hz، شتابسنج ±4g، ژیروسکوپ ±250°/s و درجه IP67 است و در دمای -40 تا 80 درجه سانتیگراد کار میکند. این دستگاه دادههای دقیق و با وضوح بالا در سه محور ارائه میدهد.
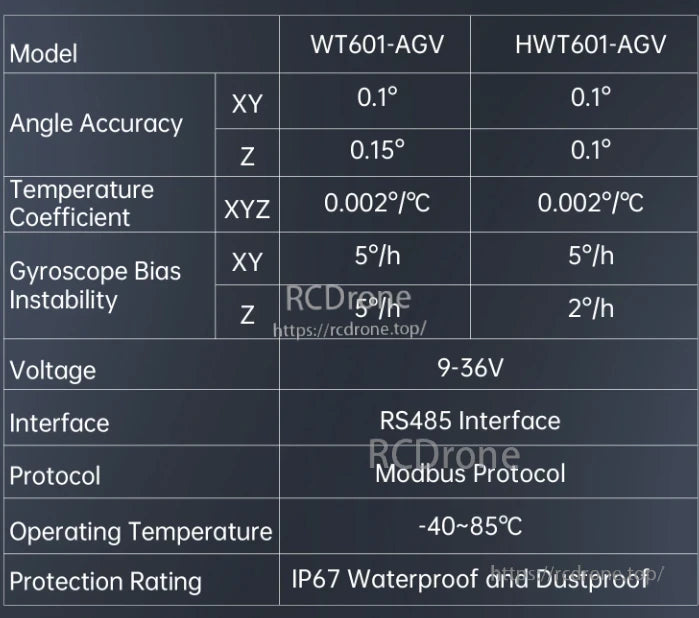
IMU مدل HWT601-AGV دقت زاویه 0.1° را در محورهای XY و Z با ضریب دما 0.002°/°C در محورهای XYZ ارائه میدهد. ناپایداری انحراف ژیروسکوپ 5°/h (XY) و 2°/h (Z) است. این دستگاه در ولتاژ 9–36V کار میکند، از RS485 با Modbus استفاده میکند و در دماهای -40 تا 85 درجه سانتیگراد عمل میکند. با درجه IP67، این دستگاه حفاظت در برابر آب و گرد و غبار را فراهم میکند. مدل WT601-AGV مشخصات مشابهی دارد اما دقت محور Z آن 0.15° و ناپایداری انحراف محور Z آن 5°/h است. هر دو مدل عملکرد قابل اعتمادی را در محیطهای چالشبرانگیز تضمین میکنند.
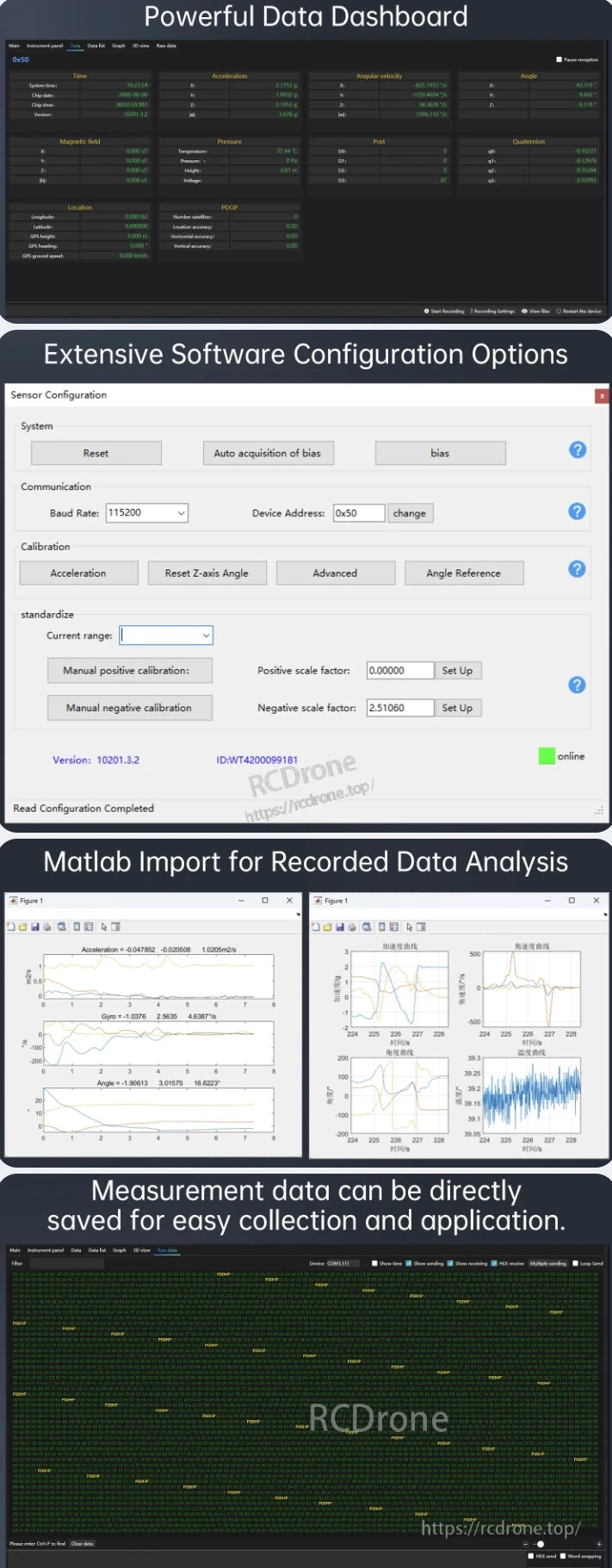
داشبورد داده قدرتمند با خوانشهای حسگر در زمان واقعی، پیکربندی نرمافزار گسترده، واردات MATLAB برای تحلیل و ذخیرهسازی مستقیم دادهها برای جمعآوری و کاربرد آسان.
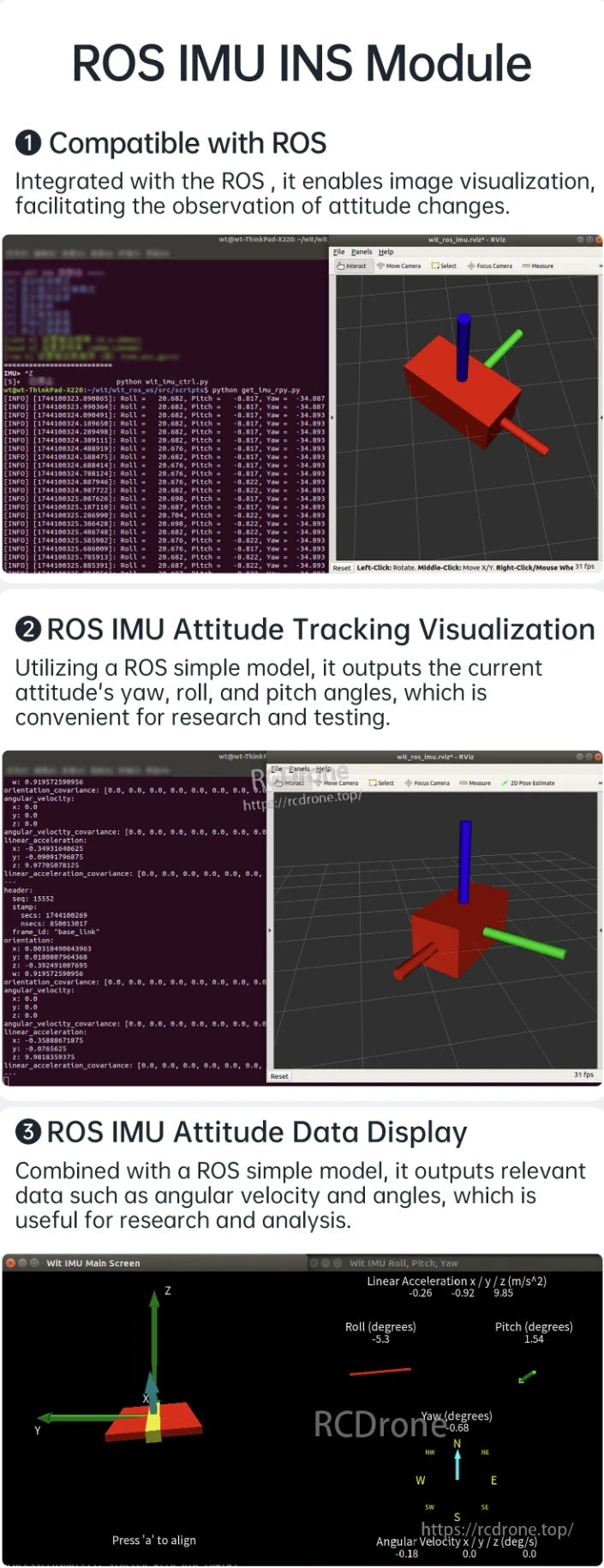
ماژول ROS IMU INS سازگاری با ROS را ارائه میدهد، ردیابی وضعیت را بصریسازی میکند و رول، پیچ، یاو، سرعت زاویهای و شتاب خطی را بهصورت بلادرنگ برای تحقیق و تحلیل نمایش میدهد.
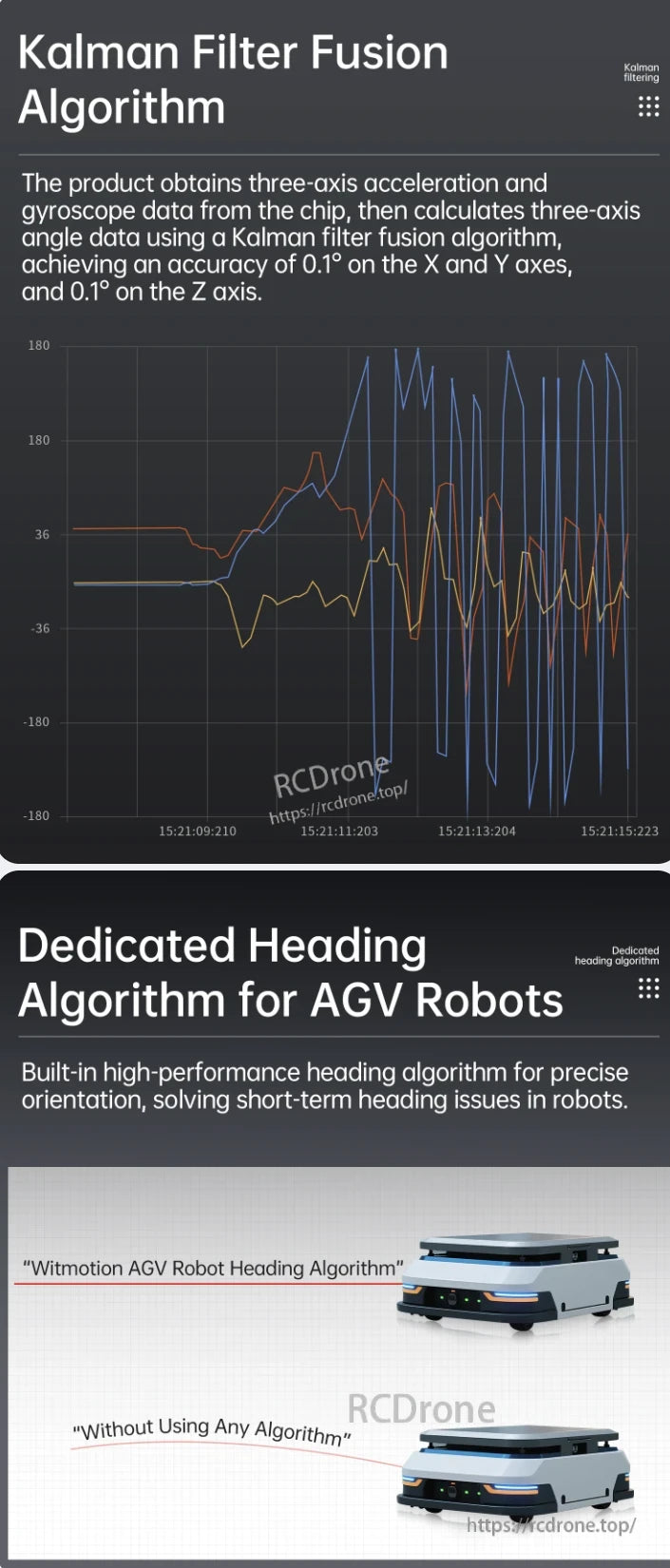
WitMotion HWT601 AGV IMU دادههای دقیق زاویهای 3 محور را با دقت 0.1° با استفاده از ادغام فیلتر کالمن ارائه میدهد. الگوریتم هدینگ اختصاصی آن اطمینان حاصل میکند که جهتگیری ربات پایدار است و بهطور قابل توجهی عملکرد را در مقایسه با سیستمهای بدون چنین الگوریتمهایی بهبود میبخشد.
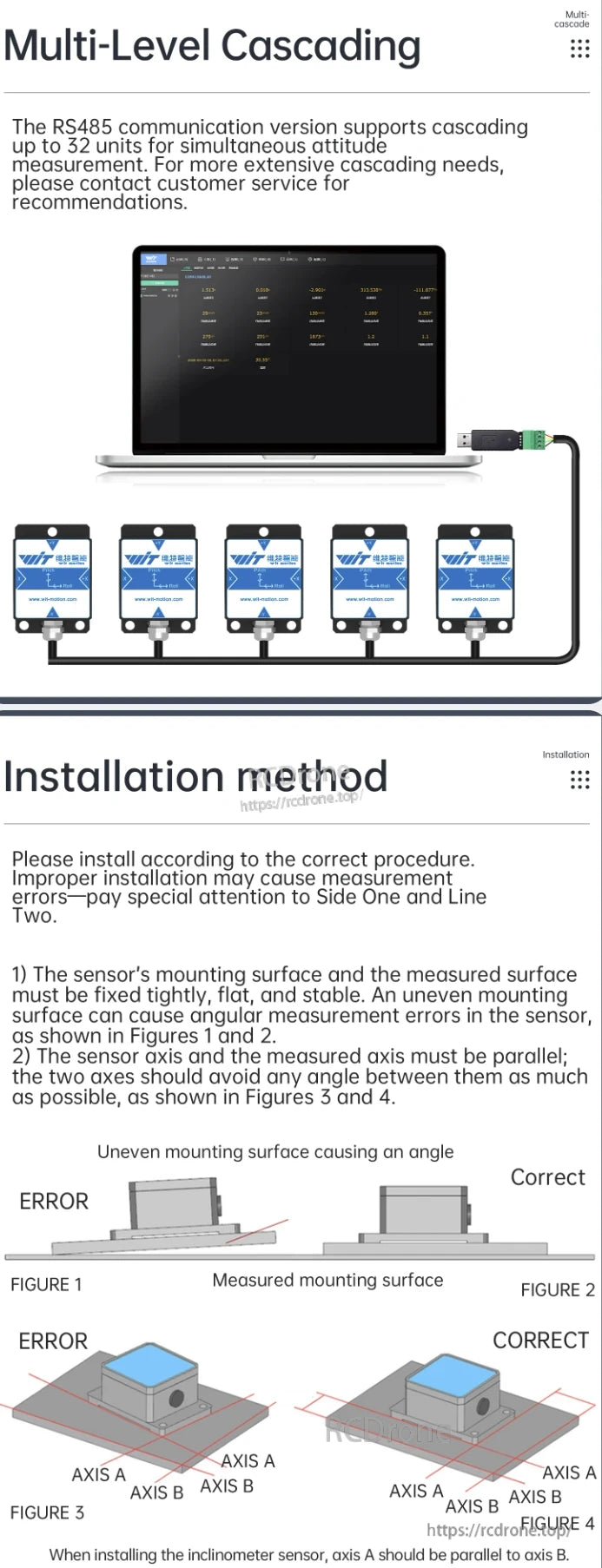
WitMotion HWT601 AGV IMU از حداکثر 32 واحد متوالی از طریق RS485 برای اندازهگیری وضعیت پشتیبانی میکند. اطمینان حاصل کنید که نصب بهصورت صاف و پایدار و محورهای همراستا برای دقت انجام شود.
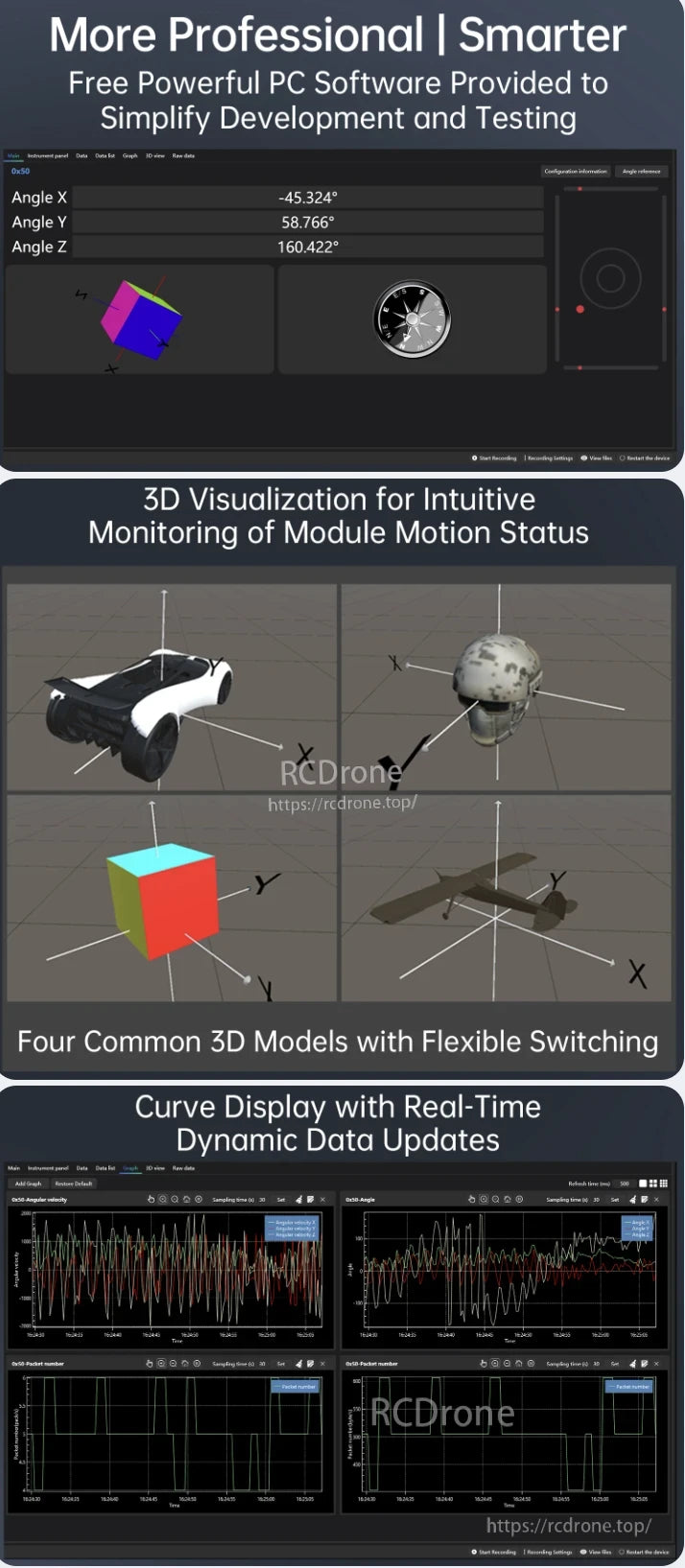
نرمافزار حرفهای PC برای WitMotion HWT601 AGV IMU بصریسازی 3D بلادرنگ، نظارت بر زاویه و نمایش منحنیهای دینامیک را ارائه میدهد.ویژگیها شامل ردیابی حرکتی شهودی، تغییر مدل انعطافپذیر و بهروزرسانی دادههای زنده برای توسعه و آزمایش کارآمد است.
مدارک پشتیبانی شامل برنامههای نمونه برای STM32، Arduino، 51 UART، Windows C++ و Matlab است تا به توسعهدهندگان کمک کند محصول را با استفاده از آموزشها و نمونههای کد به کار ببرند.
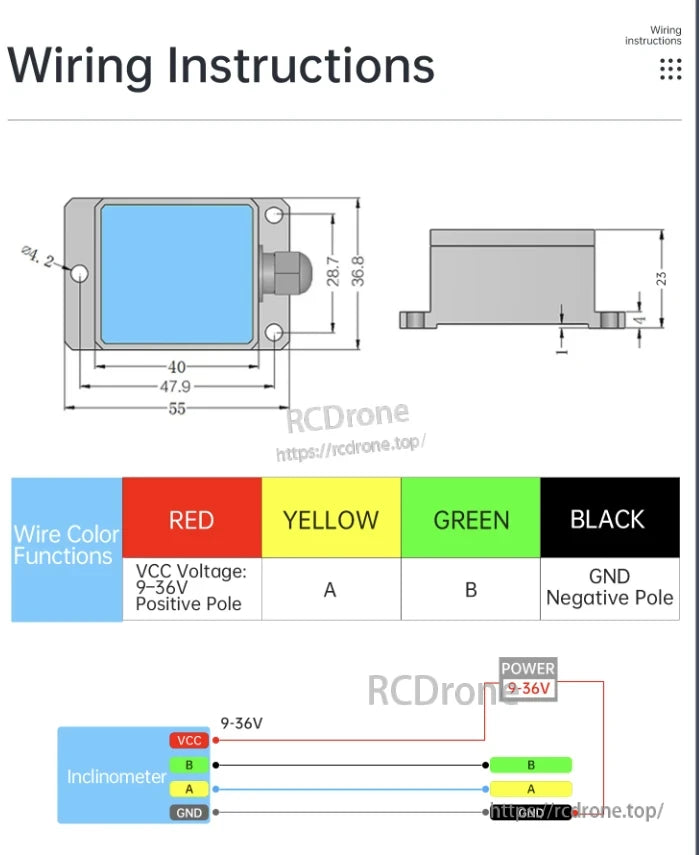
راهنمای سیمکشی WitMotion HWT601 AGV IMU: قرمز (9-36V)، زرد (A)، سبز (B)، سیاه (GND). ابعاد و نمودار اتصال ارائه شده است.

WitMotion HWT601 AGV IMU برای پهپادها، رانندگی خودکار، رباتهای متحرک و وسایل نقلیه لجستیک بدون سرنشین.
Related Collections








