سنسور زاویه دو محوره WitMotion WT1-IMU (شتابسنج + شیبسنج)، ولتاژ ۳.۳ تا ۵ ولت TTL، دقت ۰.۵ درجه، خروجی ۲۰ هرتز
سنسور زاویه دو محوره WitMotion WT1-IMU (شتابسنج + شیبسنج)، ولتاژ ۳.۳ تا ۵ ولت TTL، دقت ۰.۵ درجه، خروجی ۲۰ هرتز
WitMotion
در دسترس بودن پیکاپ بارگیری نشد
مروری بر محصول
WitMotion WT1-IMU یک حسگر زاویه دو محوره با هزینه بسیار مقرون به صرفه است که دادههای شتابسنج/ژیرسکوپ/مغناطیسسنج را با استفاده از الگوریتم مبتنی بر فیلتر کالمن ترکیب میکند تا زاویه X/Y را به صورت آنی ارائه دهد. این ماژول از 3.3–5 V تغذیه میشود، از طریق TTL serial ارتباط برقرار میکند و بر روی یک PCB با سوراخهای استامپ طلاکاری شده فشرده ساخته شده است تا ادغام SMT آسان باشد. دقت زاویه معمولی ±0.5° (X & Y) با نرخ بازگشت پیشفرض 20 Hz است. نرمافزار رسمی PC داشبوردها، کالیبراسیون، ثبت و صادرات را فراهم میکند؛ SDK/نمونهها از MATLAB، Python، Raspberry Pi، STM32، ROS، Arduino و C/C# پشتیبانی میکنند.
ویژگیهای کلیدی
-
خروجی زاویه دو محوره (X, Y) برای اندازهگیری وضعیت/شیب
-
فیلتر کالمن + الگوریتم ادغام WitMotion برای ثبات بالا
-
تأمین: 3.3–5 V, TTL UART; LDO embedded
-
دقت: ±0.5° (X & Y)
-
محدوده زاویه: X ±180°, Y ±90°
-
نرخ بازگشت پیشفرض: 20 Hz (قابل تنظیم در نرمافزار)
-
مصرف جریان: معمولاً ~5 mA، <10 mA
-
جمع و جور 15.24 × 15.24 میلیمتر ماژول؛ سوراخهای مهر طلا
-
نرمافزار رایگان PC: داشبورد، کالیبراسیون، تنظیمات پهنای باند/بُود، ضبط داده &و پخش، صادرات به TXT/BIN/PLAY/XLS
-
لوازم جانبی/تجهیزات: آداپتور USB به TTL اختیاری و تجهیز تستسوز برای راهاندازی آسان
مشخصات
| مورد | مقدار |
|---|---|
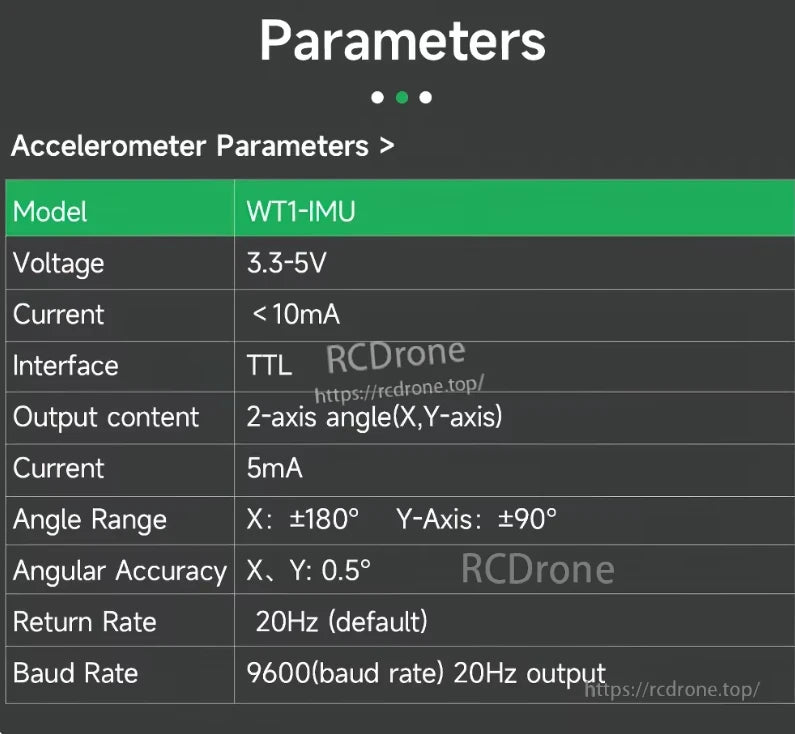
| مدل | WT1-IMU |
| ولتاژ | 3.3–5 V |
| رابط | TTL UART |
| محتوای خروجی | زاویه 2 محور (X, Y) |
| دامنه زاویه | X: ±180°؛ Y: ±90° |
| دقت زاویه | X/Y: ±0.5° |
| نرخ بازگشت پیشفرض | 20 هرتز |
| نرخ Baud | 9600 (خروجی 20 هرتز بهطور پیشفرض) |
| جریان | معمولاً 5 میلیآمپر؛ <10 میلیآمپر |
ابعاد &و محور
| اندازه (میلیمتر) | مقدار |
|---|---|
| A | 15.24 |
| B | 15.24 |
| C | 2.54 |
| D | 12.7 |
| E (ارتفاع) | 2 |
تعریف محور: X به سمت راست، Y به سمت بالا، Z به سمت خارج از برد؛ چرخش طبق قاعده دست راست انجام میشود.
پین اوت (۱۲ پین سوراخ تمبر)
| شماره | پین | عملکرد |
|---|---|---|
| 1 | D0 | NC (رزرو شده) |
| 2 | VCC | 3.3–5 ولت ورودی |
| 3 | RX | دادههای سری ورودی (TTL) |
| 4 | TX | دادههای سری خروجی (TTL) |
| 5 | GND | زمین |
| 6 | SWIM | رابط داده SWIM |
| 7 | D3 | NC (رزرو شده) |
| 8 | GND | زمین |
| 9 | SDA | NC (رزرو شده) |
| 10 | SCL | NC (رزرو شده) |
| 11 | VCC | 3.3–5 ولت ورودی |
| 12 | D2 | NC (رزرو شده) |
اتصال MCU: TTL سریال; اتصال متقابل TX↔RX (MCU-TX → WT1-IMU RX، MCU-RX → WT1-IMU TX)، VCC و GND مشترک.
نرمافزار &و توسعه
-
داشبورد: نمای زنده از زاویه، شتاب، سرعت زاویهای، میدان مغناطیسی، کواترن یون و غیره.
-
منوی تنظیمات: شتاب &و کالیبراسیون مغناطیسی، جهت قرارگیری، فرکانس/عرض باند خروجی، نرخ باود، حالت خواب.
-
ضبط/صادرات: به سرعت ثبت و صادر کنید به TXT/BIN/PLAY یا در Excel (XLS) بچسبانید.
html -
ابزارها: نمونهها/SDKها برای MATLAB، پایتون، Raspberry Pi، STM32، ROS، آردوینو، C/C#.
-
تجهیزات آزمایشی اختیاری برای فلش کردن/راهاندازی آسان.
کاربردهای معمولی
نمایشگر سر-mounted، ردیابی حرکت، رباتیک، AGV/UGV، رانندگی بدون سرنشین، نظارت بر وضعیت معدن/برج/صنعتی، تجهیزات اتوماسیون، تحقیق و توسعه هواپیماهای سرنشیندار R&D، نظارت بر ایمنی و مزارع هوشمند/اتوماسیون شده.
جزئیات

حسگر زاویه دو محوره، مقرون به صرفه، پایدار، با الگوریتم فیلتر کالمن، دارای گواهی ISO9001.
WT1-IMU شتابسنج در ولتاژ 3.3-5V کار میکند، <10mA جریان، رابط TTL. زاویههای دو محوره (X: ±180°، Y: ±90°) با دقت 0.5° را خروجی میدهد. نرخ بازگشت پیشفرض 20Hz، نرخ Baud 9600.
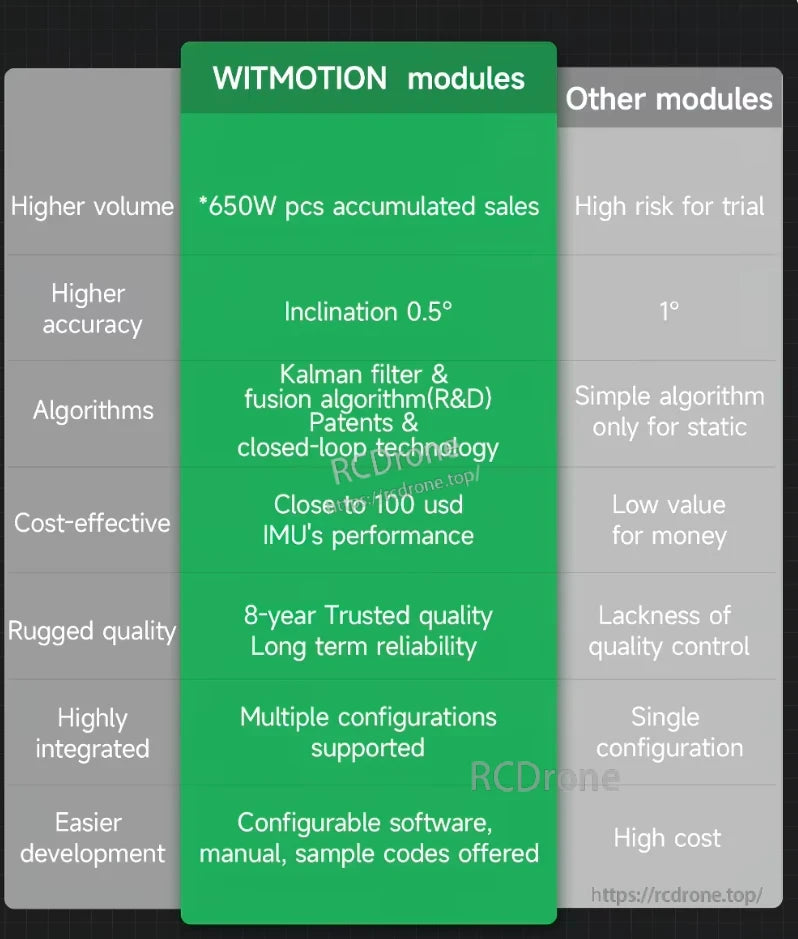
ماژولهای WitMotion با طراحی مقاوم، پیکربندیهای متعدد و توسعه آسان، حجم بالا، دقت و صرفهجویی در هزینه را ارائه میدهند. این ماژولها شامل فروش 650W، انحراف 0.5°، فیلتر کالمن، فناوری حلقه بسته و نرمافزار قابل پیکربندی هستند. سایر ماژولها عملکرد پایینتری دارند، ویژگیهای کمتری ارائه میدهند و ریسک بالاتری دارند.
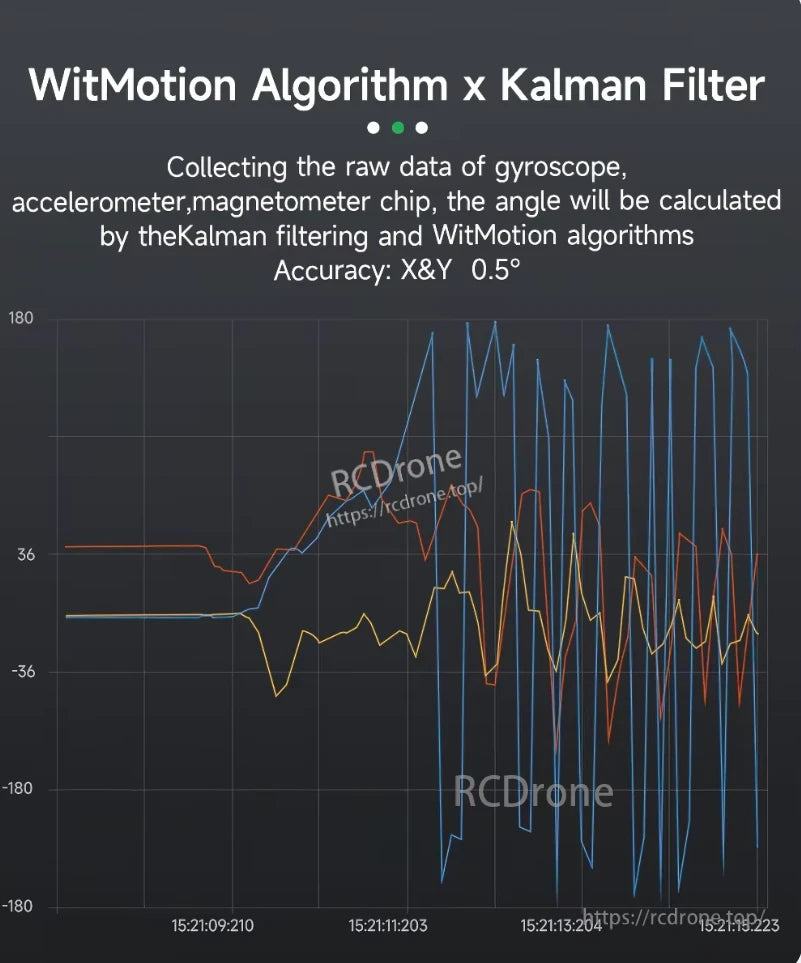
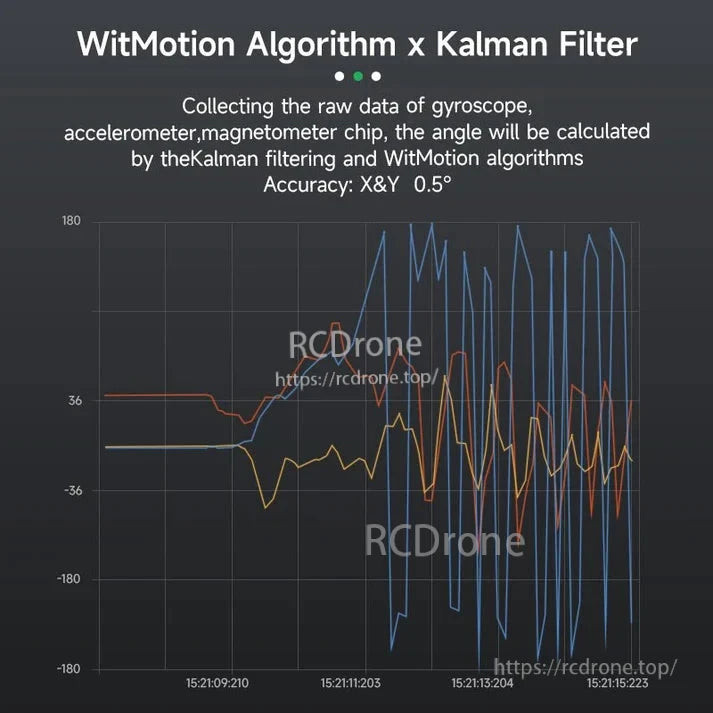
الگوریتم WitMotion x فیلتر کالمن. دادههای خام را از ژیروسکوپ، شتابسنج و مغناطیسسنج جمعآوری میکند. زاویه را با استفاده از فیلتر کالمن و الگوریتمهای WitMotion محاسبه میکند. دقت: X&Y 0.5°.
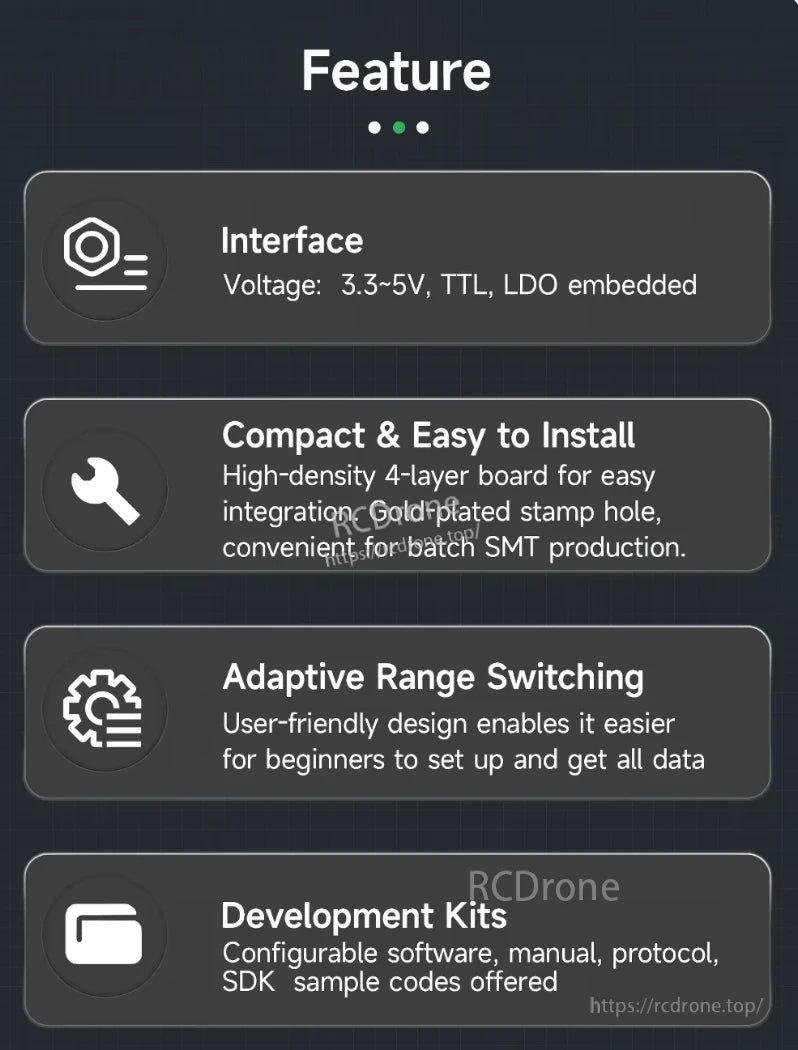
رابط: 3.3~5V، TTL، LDO داخلی. جمع و جور & نصب آسان با برد 4 لایه با چگالی بالا و سوراخهای طلاکاری شده. سوئیچینگ دامنه تطبیقی برای مبتدیان. کیتهای توسعه شامل نرمافزار، راهنما، پروتکل، SDK و کدهای نمونه هستند.
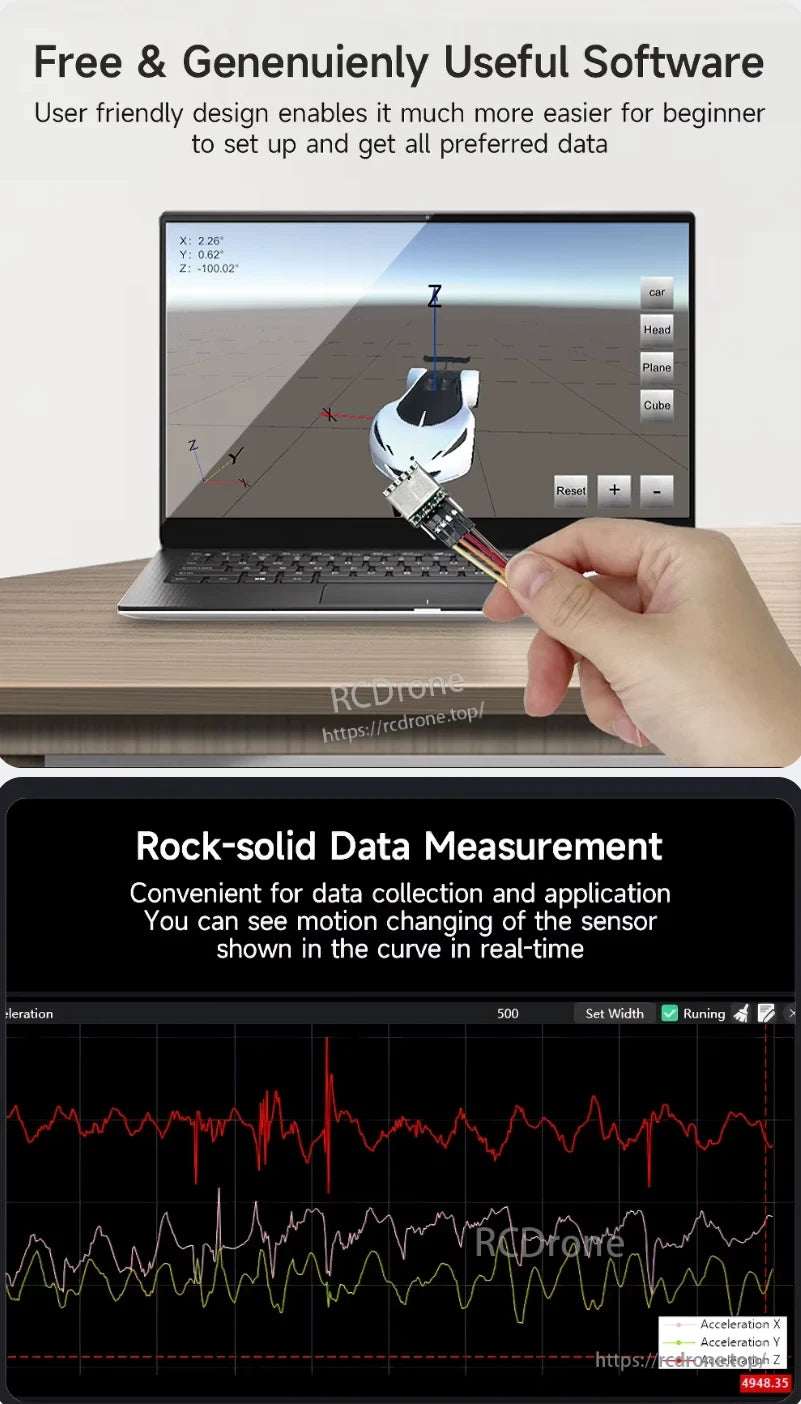
نرمافزار رایگان و واقعاً مفید با طراحی کاربرپسند برای راهاندازی آسان و بازیابی دادهها ارائه میشود. ردیابی حرکت در زمان واقعی با اندازهگیری دادههای محکم تغییرات شتاب را در محورهای X، Y و Z از طریق منحنیهای دینامیک نمایش میدهد.
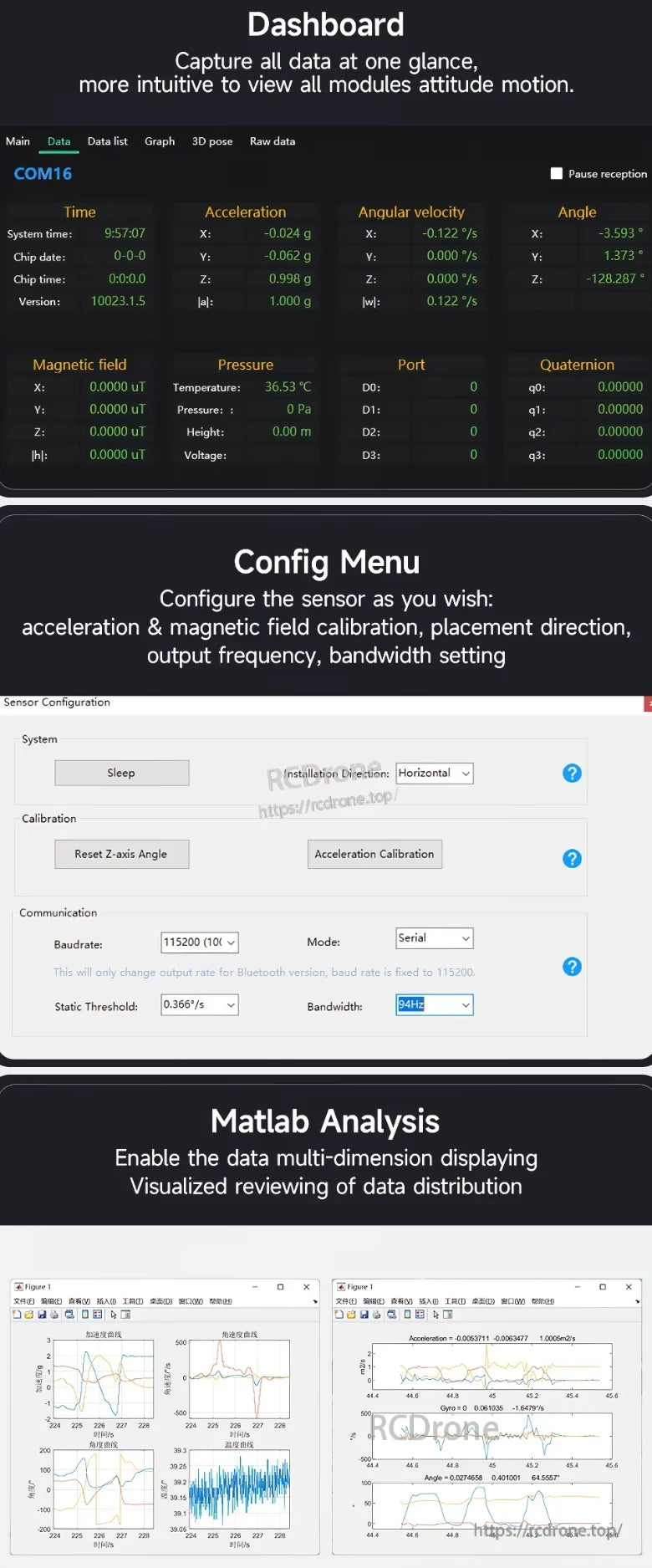
داشبورد دادههای حسگر در زمان واقعی را شامل شتاب، سرعت زاویهای، زاویه، میدان مغناطیسی، فشار و کواترن را نمایش میدهد. منوی پیکربندی امکان کالیبراسیون، جهت نصب، نرخ باود و تنظیمات پهنای باند را فراهم میکند. تحلیل متلب امکان تجسم دادههای چندبعدی را فراهم میآورد.
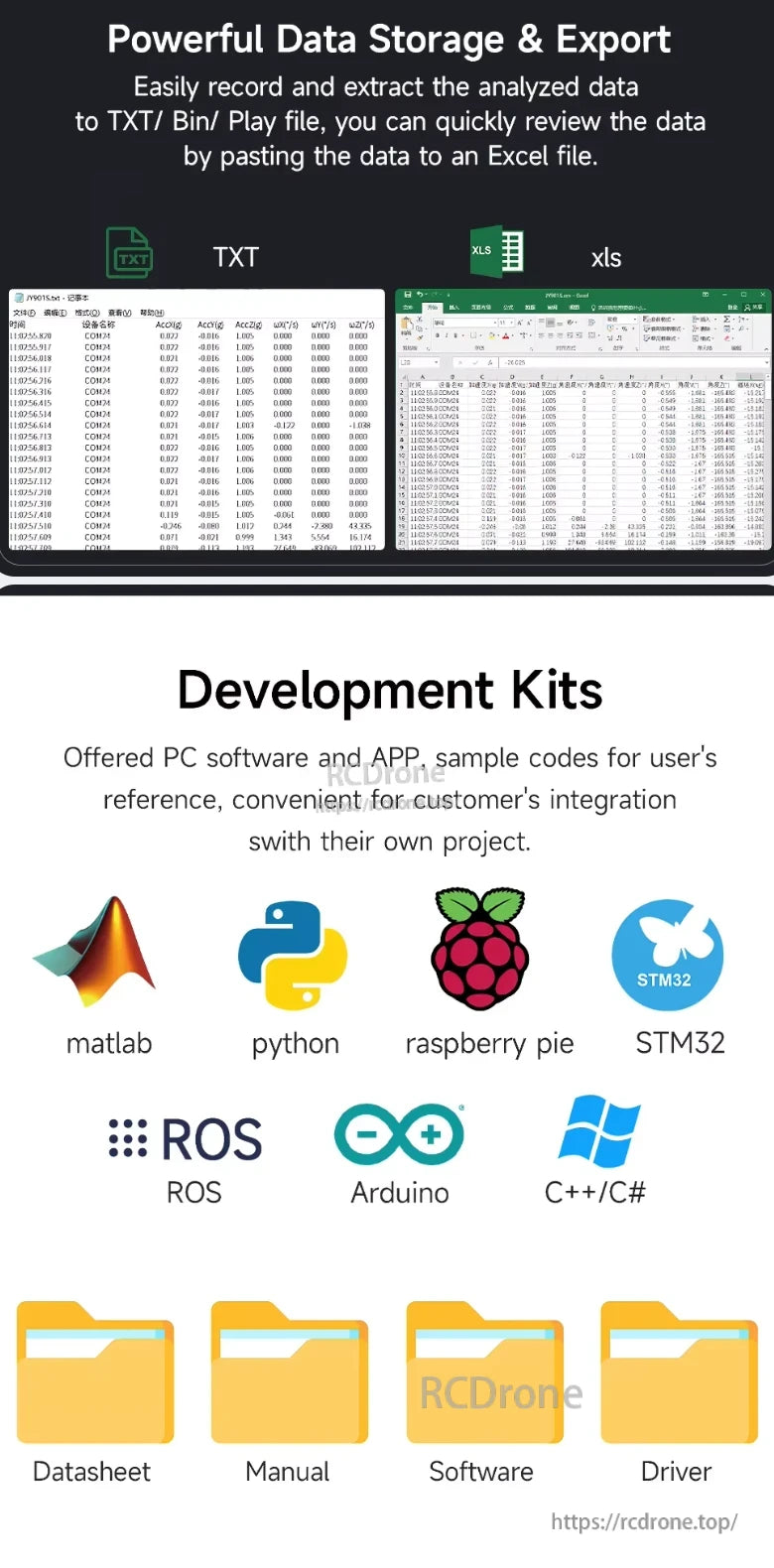
ذخیرهسازی دادههای قدرتمند و صادرات به فایلهای TXT، BIN یا Play؛ سازگار با MATLAB، Python، Raspberry Pi، STM32، ROS، Arduino، C++/C#. شامل برگه داده، راهنما، نرمافزار و درایور برای ادغام آسان.
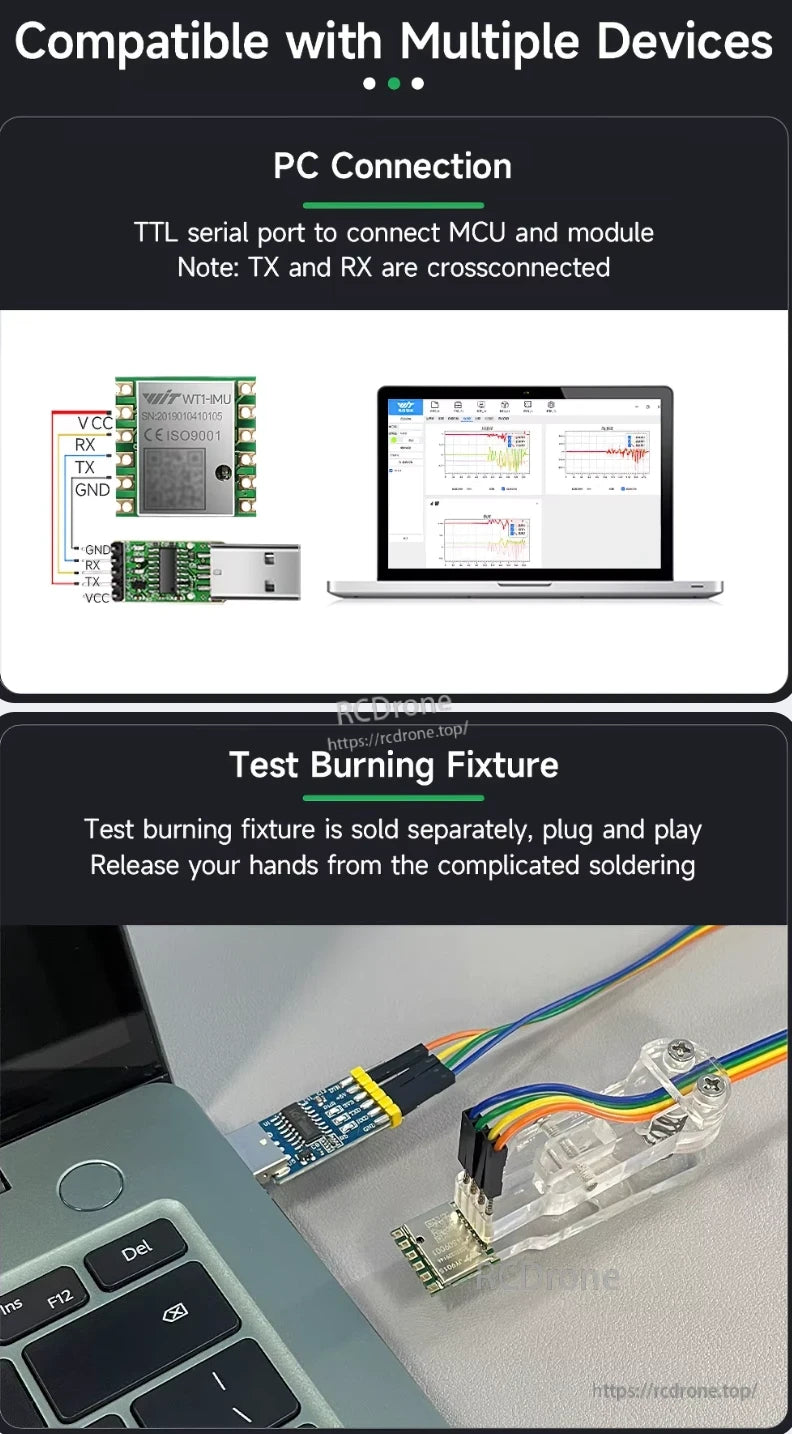
WitMotion WT1-IMU از اتصال به کامپیوتر از طریق پورت سریال TTL با TX و RX متقاطع پشتیبانی میکند.سازگار با چندین دستگاه. تست فیکسچر سوزاندن به صورت جداگانه فروخته میشود، اتصال و استفاده آسان بدون لحیمکاری.
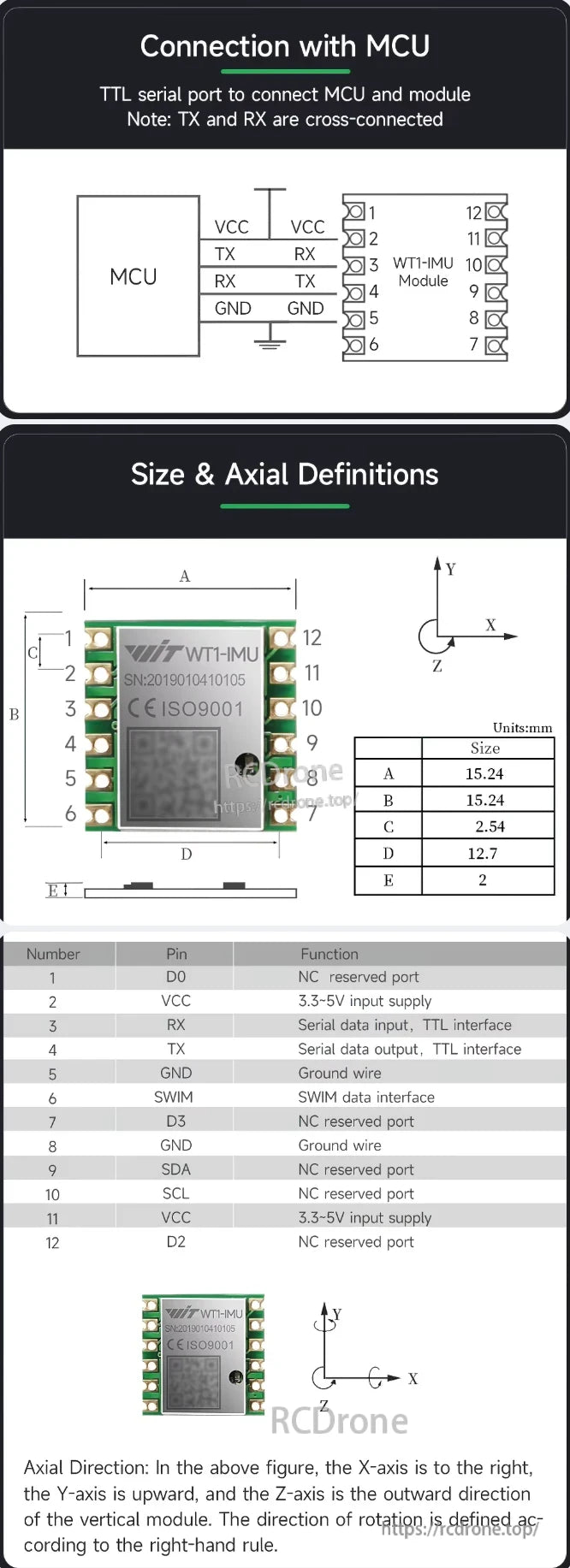
سنسور زاویه دو محوره WitMotion WT1-IMU اتصال سری TTL، چیدمان 12 پین، اندازه جمع و جور 15.24×15.24×2.54 میلیمتر، محورهای قانون دست راست را ارائه میدهد و شامل پینهای VCC، GND، TX، RX، SWIM، SDA، SCL است.

کاربردهای سنسور IMU: معدن، کشاورزی، رباتیک، برجها، اتوماسیون، پهپادها، ردیابی، نظارت.