












شتابسنج، ژیروسکوپ و قطبنمای دیجیتال ۹ محوره WitMotion WT901C-485 (RS485/RS232/TTL)، دقت زاویه ۰.۰۵ درجه، AHRS با فرکانس ۰.۲ تا ۲۰۰ هرتز
شتابسنج، ژیروسکوپ و قطبنمای دیجیتال ۹ محوره WitMotion WT901C-485 (RS485/RS232/TTL)، دقت زاویه ۰.۰۵ درجه، AHRS با فرکانس ۰.۲ تا ۲۰۰ هرتز
RCDrone
در دسترس بودن پیکاپ بارگیری نشد
مروری بر محصول
WitMotion WT901C-485 یک IMU AHRS 9 محوره جمع و جور است که بر اساس یک مجموعه حسگر کلاس MPU9250 (شتابسنج + ژیروسکوپ + مغناطیسسنج) و الگوریتم ادغام/کالمن WitMotion ساخته شده است. این دستگاه خروجیهای زاویه، شتاب، سرعت زاویهای، میدان مغناطیسی و کواترنیون را با دقت استاتیک XY 0.05° (دینامیک 0.1°) و نرخ بهروزرسانی قابل تنظیم 0.2–200 Hz ارائه میدهد. چندین رابط فیزیکی (RS485/RS232 Modbus & TTL UART) و دامنههای ورودی وسیع، WT901C-485 را به راحتی با Arduino/STM32/MCUs، کامپیوترها و کنترلرهای صنعتی یکپارچه میکند. نرمافزار رسمی ویندوز (MiniIMU.exe) نمودارهای زمان واقعی، دمو 3D، ثبت/صادرات داده و کالیبراسیون مغناطیسی بصری را فراهم میکند.
ویژگیهای کلیدی
-
خروجیهای 9 محوره: زاویه (Roll/Pitch/Yaw)، شتاب/ژیروسکوپ/مغناطیس 3 محوره، کواترنیون.
-
ثبات و دقت بالا:& XY 0.05° ایستا، 0.1° دینامیک; ثبات شتاب 0.01 g.
-
ورودی/خروجی انعطافپذیر: TTL / RS232 / RS485 (Modbus); baud 4,800–230,400 (پیشفرض 9,600).
-
نرخ قابل تنظیم: 0.2–200 Hz (پیشفرض 10 Hz).
-
منبع وسیع: TTL 3.3–5 V، RS232/RS485 5–36 V; <25 mA معمولی.
-
ابزارها &و SDKها: برنامه ویندوز، برنامه اندروید، درایورهای CH340/CP2102، کد نمونه برای C/C++/STM32/Arduino/Matlab.
-
کالیبراسیون مغناطیسی &و دمو 3D برای راهاندازی اولیه؛ نمودارهای زنده و صادرات TXT.
-
طراحی صنعتی: –40~85 °C، 51×36×15 میلیمتر، نصب عمودی یا افقی.
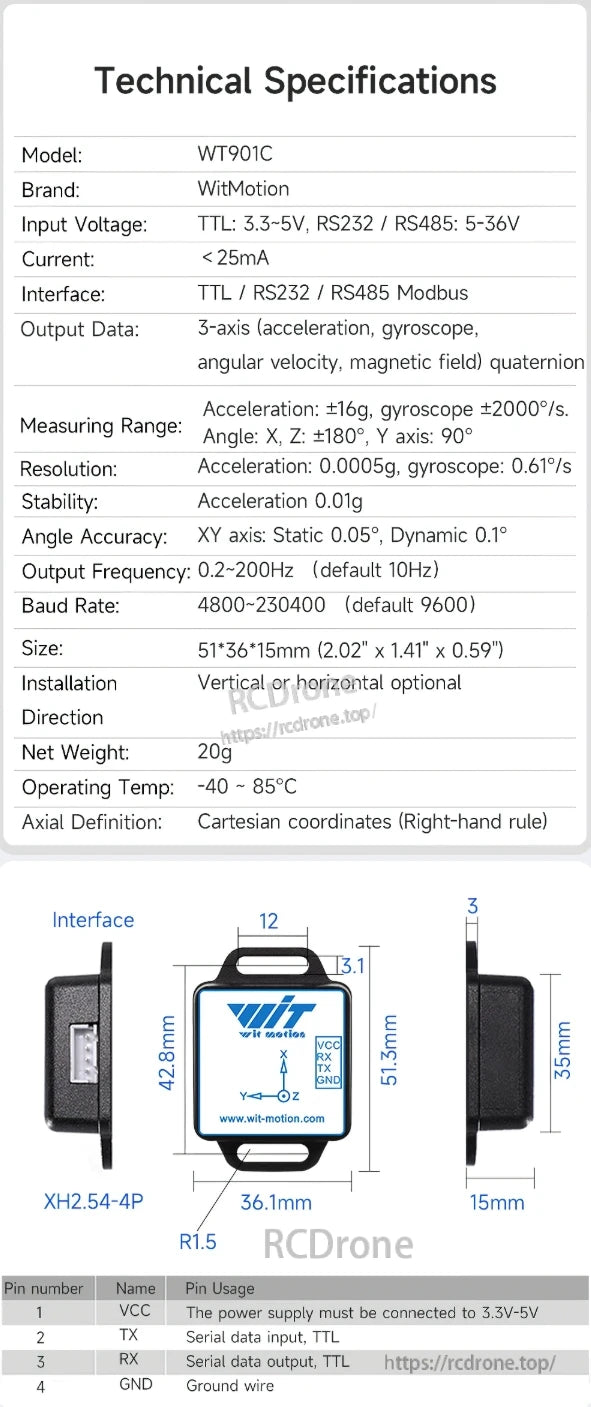
مشخصات فنی
| مورد | مشخصات |
|---|---|
| مدل | WT901C (نوع WT901C-485) |
| رابطها | TTL / RS232 / RS485 (Modbus) |
| ولتاژ ورودی | TTL: 3.3–5 V; RS232/RS485: 5–36 V |
| جریان | < 25 mA |
| دادههای خروجی | شتاب، سرعت زاویهای، میدان مغناطیسی، زاویه، کواترنیون |
| محدودههای اندازهگیری | شتاب ±16 g، ژیروسکوپ ±2000 °/s; زاویه: X,Z ±180°، Y 90° |
| دقت | شتاب 0.0005 g، ژیروسکوپ 0.61 °/s |
| ثبات | شتاب 0.01 g |
| دقت زاویه | XY ایستا 0.05°، پویا 0.1° |
| فرکانس خروجی | 0.2–200 هرتز (پیشفرض 10 هرتز) |
| نرخ Baud | 4,800–230,400 (پیشفرض 9,600) |
| اندازه / وزن | 51×36×15 میلیمتر, 20 گرم |
| دمای عملیاتی | –40 ~ 85 درجه سانتیگراد |
| محورها | کارتیزین، قاعده دست راست |
| نصب | عمودی یا افقی |
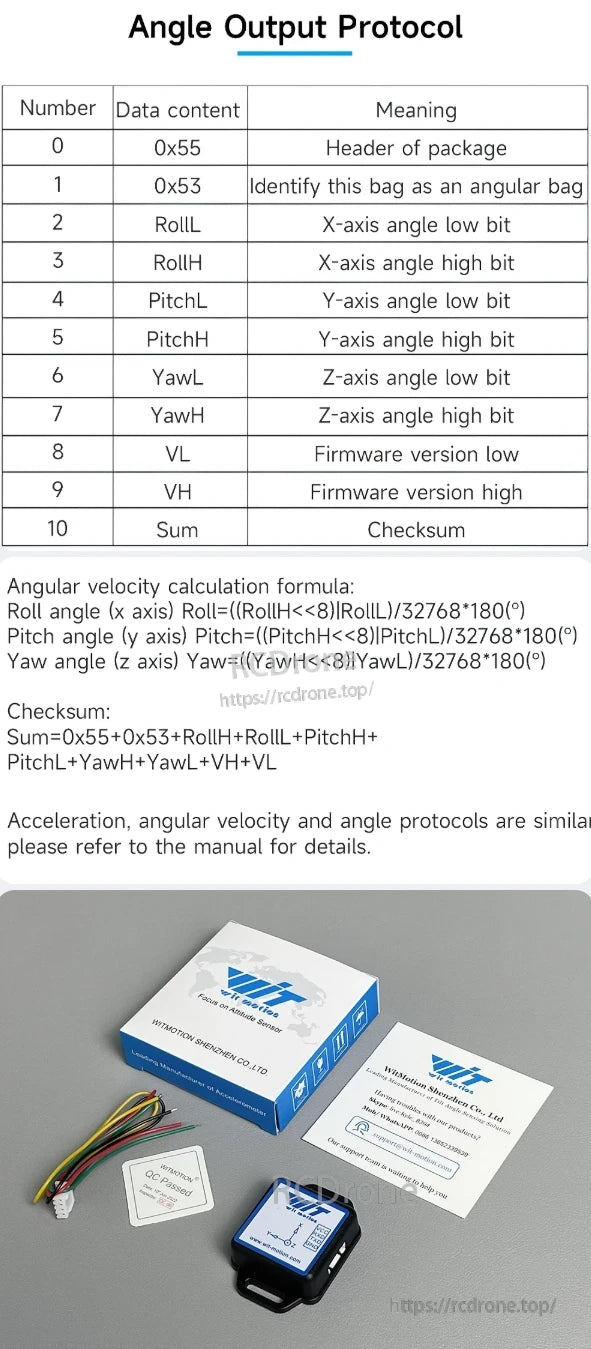
فریم زاویه (0x55 0x53) – پروتکل خروجی
| ایندکس بایت | محتوا | معنی |
|---|---|---|
| 0 | 0x55 | هدر بسته |
| 1 | 0x53 | شناسه فریم “زاویه” |
| 2–3 | RollL/RollH | زاویه محور X (کم/زیاد) |
| 4–5 | PitchL/PitchH | زاویه محور Y (کم/زیاد) |
| 6–7 | YawL/YawH | زاویه محور Z (کم/زیاد) |
| 8 | VL | نسخه فریمور پایین |
| 9 | VH | نسخه فریمور بالا |
| 10 | جمع | چکسام |
کدگذاری زاویه
Roll (°) = ((RollH << 8) | RollL) / 32768 × 180
Pitch (°) = ((PitchH << 8) | PitchL) / 32768 × 180
Yaw (°) = ((YawH << 8) | YawL) / 32768 × 180
چکسوم
جمع = 0x55 + 0x53 + RollL + RollH + PitchL + PitchH + YawL + YawH + VL + VH.
(فریمهای شتاب و سرعت زاویهای از همان سبک چیدمان پیروی میکنند—به راهنما مراجعه کنید.)
ابعاد &و کانکتور
اندازه محفظه: 51 × 36 × 15 میلیمتر (ارتفاع × عرض × عمق)، با گوشههای نصب؛ وزن ≈ 20 گرم.
کانکتور: XH2.54-4P (هدری روی سنسور).
پیناوت (نسخه TTL)
| پین | نام | توضیحات |
|---|---|---|
| 1 | VCC | ورودی برق 3.3–5 V |
| 2 | TX | ورودی داده سری، سطح TTL |
| 3 | RX | خروجی داده سری، سطح TTL |
| 4 | GND | زمین |
یادداشتها: برای ادغام مستقیم با MCU از سطوح TTL استفاده کنید. انواع RS232/RS485 از سطوح ولتاژ و استانداردهای سیمکشی مربوطه خود استفاده میکنند.
نرمافزار &و ابزارها
-
MiniIMU.exe (ویندوز): پیکربندی (الگوریتم، جهت نصب، دامنهها، پهنای باند)، نمودارهای زمان واقعی، نمای خام/هگز، ضبط داده و صادرات TXT.
-
دموی 3D: تجسم جهتگیری در زمان واقعی (منبع موجود است).
-
کالیبراسیون مغناطیسی بصری: جادوگر تطبیق بیضی برای حذف انحراف (برای استفاده اول توصیه میشود).
-
درایورها &و کد: درایورهای CH340/CP2102؛ نمونههایی برای STM32، آردوینو، C/C++، متلب; برنامه اندروید؛ ویدیوهای نمایشی PC/تلفن.
کاربردهای معمولی
خودکارسازی و رباتیک، سکوهای تراز، نظارت بر زاویه شیب، نظارت بر لرزش، الکترونیک مصرفی، یکپارچهسازی سیستم IoT، آزمایش صنعتی، هدستهای VR/AR.
جزئیات

IMU AHRS مقرون به صرفه با دقت 0.05° در محورهای X و Y. شامل حسگرهای انحراف، لرزش، وضعیت با استفاده از الگوریتم ادغام WitMotion. شامل توابع شتاب، ژیروسکوپ، زاویه، مغناطیسی، فیلتر کالمن و کواترنیون.
سنسور IMU WitMotion WT901C دارای شتابسنج 3 محوره، ژیروسکوپ، سرعت زاویهای و حسگر میدان مغناطیسی است. این سنسور از رابطهای TTL/RS232/RS485 پشتیبانی میکند، دارای دامنه شتاب ±16g، ژیروسکوپ ±2000°/s، دقت زاویه استاتیک 0.05° و عملکرد در دمای بین -40°C تا 85°C است.

سنسور IMU WitMotion WT901C امکاناتی برای اتوماسیون، هدستهای VR، تراز کردن و نظارت بر لرزش ارائه میدهد. کاربردها شامل الکترونیک مصرفی، ادغام IoT، آزمایشهای صنعتی و AR/VR است. نرمافزار رایگان ارائه شده، اندازهگیری وضعیت کاربرپسند با دادههای زاویهای در زمان واقعی را فراهم میکند.
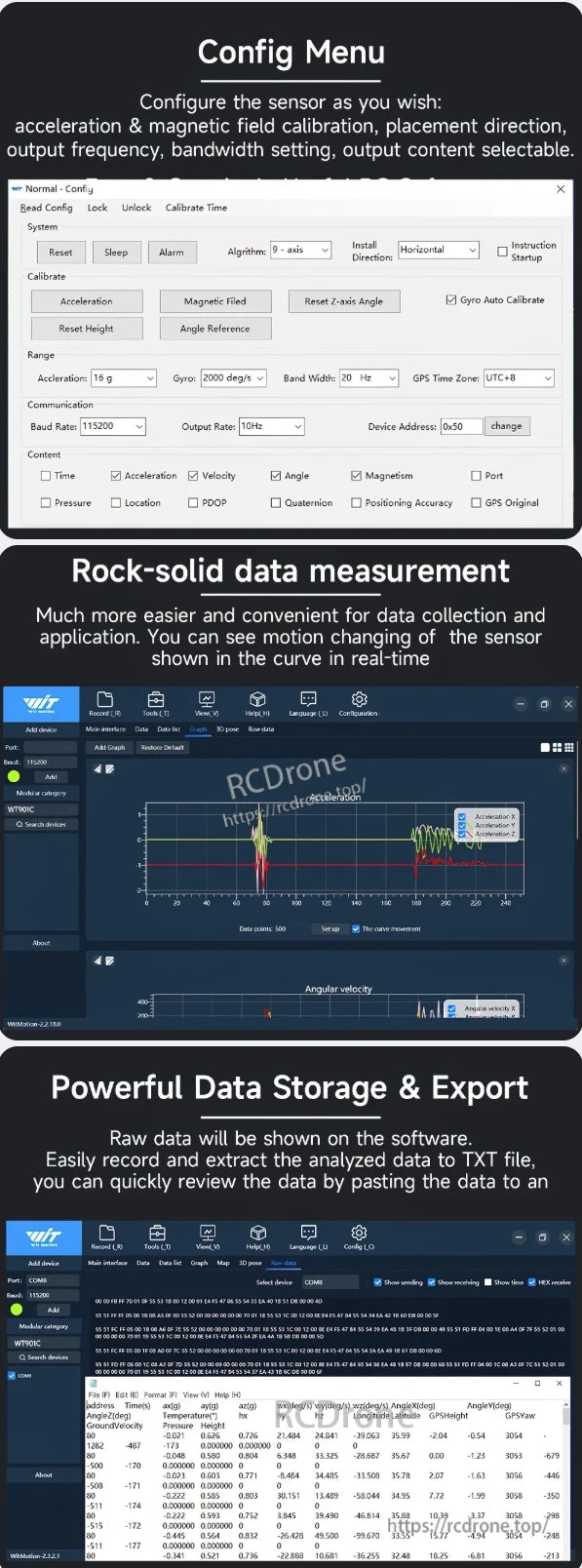
سنسور IMU WitMotion WT901C تنظیمات قابل پیکربندی برای شتاب، میدان مغناطیسی و جهتیابی ارائه میدهد. این سنسور تجسم دادههای زمان واقعی، اندازهگیری قوی و پشتیبانی از ذخیرهسازی/صادرات دادهها در فرمت TXT برای تحلیل را فراهم میکند.
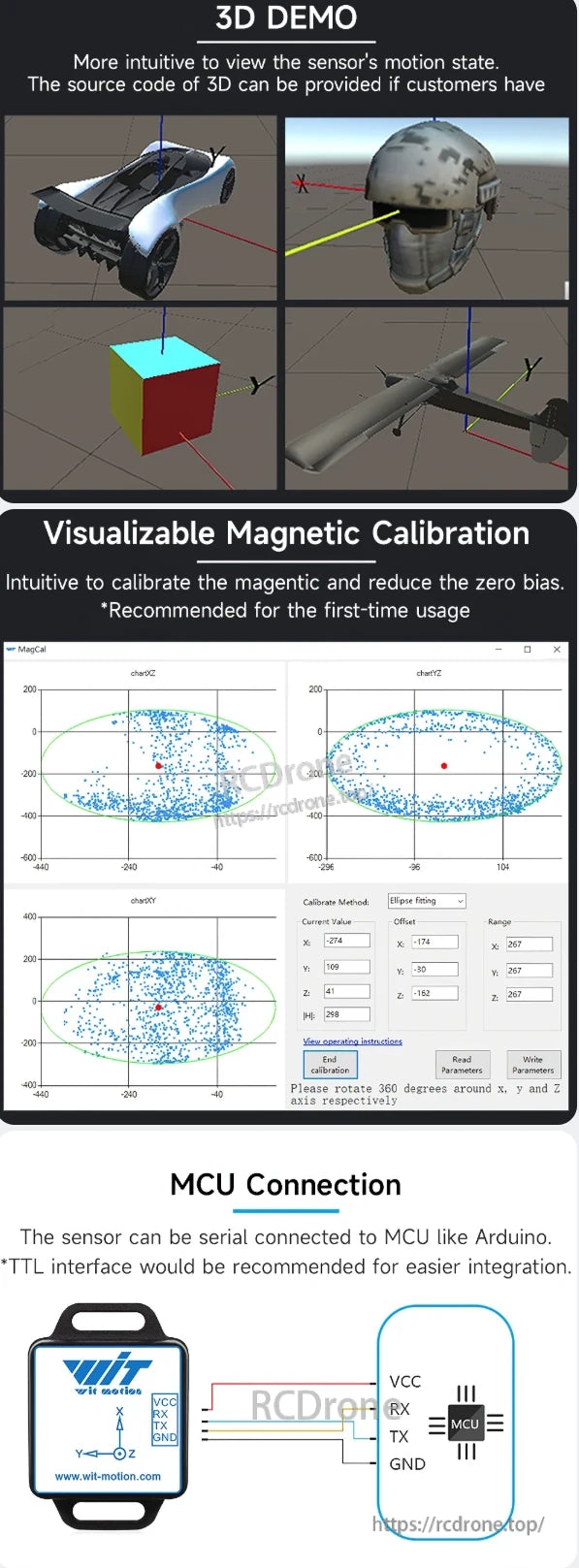
دموی 3D حرکت حسگر را با مدلهای خودرو، کلاه ایمنی، مکعب و پهپاد به تصویر میکشد. رابط کالیبراسیون مغناطیسی امکان تنظیم شهودی را فراهم میکند. جزئیات اتصال MCU شامل رابط TTL برای Arduino است، با پینهای VCC، RX، TX، GND برچسبگذاری شده.

کیتهای توسعه شامل نرمافزار رایگان ویندوز، درایورها، راهنماها و کدهای نمونه برای STM32، Arduino، C++، MATLAB هستند. شامل PDFها، ویدیوهای دمویی و پشتیبانی از برنامه اندروید برای حسگر IMU WT901C است.
جزئیات پروتکل خروجی زاویه حسگر IMU WT901C: ساختار داده، محاسبات زاویهای، فرمول چکسام، بستهبندی. شامل زوایای رول، پیچ، یاو، نسخه فریمور و چکسام است.
Related Collections












