








ماژول GPS GNSS RTK WitMotion WTRTK-M ZED-F9P، موقعیتیابی تفاضلی سانتیمتری برای پهپاد/خودرو، پشتیبانی از GPS/GLONASS/Galileo/BeiDou، رابط UART TTL، فرمت NMEA/UBX/RTCM
ماژول GPS GNSS RTK WitMotion WTRTK-M ZED-F9P، موقعیتیابی تفاضلی سانتیمتری برای پهپاد/خودرو، پشتیبانی از GPS/GLONASS/Galileo/BeiDou، رابط UART TTL، فرمت NMEA/UBX/RTCM
WitMotion
در دسترس بودن پیکاپ بارگیری نشد
Overview
ماژول WTRTK-M یک ماژول موقعیتیابی تفاضلی RTK با دقت بالا است که بر اساس موتور GNSS u-blox ZED-F9P ساخته شده است. این ماژول به طور همزمان GPS، GLONASS، Galileo، BeiDou و QZSS را ردیابی کرده و پس از اصلاح RTK دقتی در سطح سانتیمتر ارائه میدهد. این ماژول دریافت دو فرکانسه، خروجی بلادرنگ 5 هرتز برای برنامههای نقشهبرداری/خودکار و یک ابزار PC برای پیکربندی یککلیدی ایستگاههای موبایل/پایه و تجسم مسیر فراهم میکند. فناوریهای ضد تداخل و کالیبراسیون به افزایش ثبات و امنیت دادهها کمک میکنند.
ویژگیهای کلیدی
-
RTK در سطح سانتیمتر: جریان کار موبایل/پایه با همگرایی سریع.
-
چند منظوره، دو فرکانسه: GPS L1/L2; GLONASS G1/G2; BeiDou B1/B2; Galileo E1/E5b; QZSS L1/L2.
-
حساسیت بالا &و شروع سریع: 184 کانال؛ شروع سرد 24 ثانیه، شروع داغ 2 ثانیه، بازیابی 2 ثانیه؛ همگرایی ≤10 ثانیه.
-
عملکرد زمان/جهت: 1PPS RMS 30 نانوثانیه (99% 60 نانوثانیه)؛ دقت جهت 0.4° (دینامیک 0.3°).
-
پروتکلهای غنی: NMEA, UBX, RTCM 3.3; فاز حامل (RAWX) پشتیبانی میشود.
-
نرخ قابل تنظیم &و 1 PPS: 0.25–20 هرتز بهروزرسانی (پیشفرض 1 هرتز)؛ پالس دوم 0.25 هرتز–10 مگاهرتز (دوره پیشفرض 1 ثانیه، سطح بالا ~100 نانوثانیه).
-
دوگانه UART (TTL) و گزینههای آنتن SMA-K / IPEX; نرمافزار PC برای مشاهده مسیرها و تنظیمات دستگاه.
-
صحنههای کاربردی: نقشهبرداری/نقشهکشی UAV، تراکتورهای خودران/AGV، ناوبری خودرو با دقت بالا، رباتیک.
چگونه RTK کار میکند (خلاصه)
یک ایستگاه پایه خطای اندازهگیری ماهوارهای را نسبت به موقعیت شناخته شدهاش محاسبه کرده و دادههای تفاضلی RTCM را پخش میکند. ایستگاه متحرک این اصلاحات را اعمال میکند تا به موقعیتیابی در زمان واقعی با دقت سانتیمتر دست یابد.
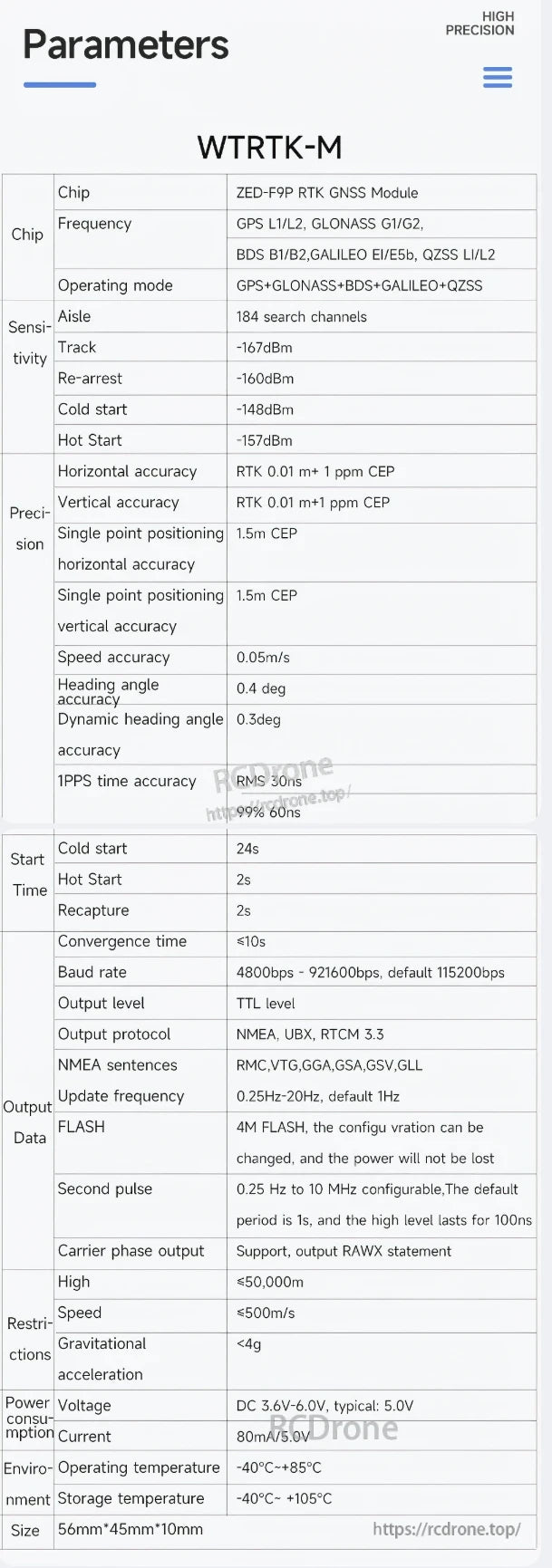
htmlمشخصات اصلی
| مورد | مشخصات |
|---|---|
| چیپ GNSS | ماژول RTK GNSS ZED-F9P |
| مجموعهها/باندها | GPS L1/L2، GLONASS G1/G2، BeiDou B1/B2، Galileo E1/E5b، QZSS L1/L2 |
| کانالها | 184 کانال جستجو |
| حساسیت | ردیابی -167 dBm; بازیابی مجدد -160 dBm; شروع سرد -148 dBm; شروع داغ -157 dBm |
| دقت RTK (CEP) | افقی/عمودی: 0.01 متر + 1 ppm CEP |
| دقت نقطهای (CEP) | افقی 1.5 متر، عمودی 1. 5 m |
| دقت سرعت | 0.05 m/s |
| دقت جهت | 0.4° (پویا 0.3°) |
| دقت زمان 1PPS | RMS 30 ns, 99% 60 ns |
| شروع/دوبارهگیری | سرد 24 ثانیه, داغ 2 ثانیه, دوبارهگیری 2 ثانیه; همگرایی ≤10 ثانیه |
| نرخ Baud | 4 800–921 600 bps (پیشفرض 115 200 bps) |
| سطح الکتریکی | TTL |
| پروتکلها | NMEA, UBX, RTCM 3.3; جملات NMEA: RMC/VTG/GGA/GSA/GSV/GLL |
| نرخ بهروزرسانی | 0.25–20 هرتز (پیشفرض 1 هرتز); توجه: نرخهای بسیار بالا بار سری را افزایش میدهند—نگهدارید ≤ 5 هرتز برای قابلیت اطمینان |
| فلش داخلی | 4 مگابایت، پیکربندی را پس از خاموش شدن حفظ میکند |
| فاز حامل | خروجی RAWX پشتیبانی میشود |
| محدودیتها | ارتفاع ≤ 50,000 متر; سرعت ≤ 500 متر/ثانیه; شتاب < 4 g |
| منبع | DC 3.6–6.0 ولت (معمولی 5.0 V), ≈ 80 mA @ 5 V |
| عملکرد / ذخیره سازی | -40 °C تا +85 °C / -40 °C تا +105 °C |
| ابعاد | 56 × 45 × 10 mm (نقشههای جلو ~46 mm ارتفاع) |
رابطها &و نشانگرها
آنتن: SMA-K (با گزینه IPEX).
پورتهای UART (TTL، هر کدام 4 پین):
-
P1 (راست) – VI (3.6–6.0 V، 5 V دریافت)، G (GND)، T1 (TX)، R1 (RX).
-
P2 (چپ) – VO (3.6–6.0 V، 5 V دریافت)، G (GND)، T2 (TX)، R2 (RX).
html
P2 برای ورودی/خروجی RTCM استفاده میشود؛ P1 دادههای NMEA را خروجی میدهد. VCC های P1/P2 به صورت داخلی متصل هستند—قدرت از هر یک.
LEDها
-
PWR: قرمز روشن = برق متصل است.
-
TX1/TX2: سبز چشمک میزند = پورت دارای خروجی داده است.
-
PPS: خاموش قبل از تثبیت؛ آبی چشمک میزند بعد از موقعیتیابی 3D.
-
RTK: خاموش زمانی که در RTK نیست؛ آبی چشمک میزند در RTK Float; روشن در RTK Fixed.
اتصال &و نرمافزار
-
تنظیمات سیمی: آنتن را به SMA متصل کنید؛ UART1 را به کامپیوتر متصل کنید تا دادههای موقعیت را مشاهده کنید.
html -
پایه/موبایل: یک ماژول را به عنوان پایه تنظیم کنید (خروجی RTCM)؛ موبایل RTCM را مصرف میکند تا RTK را به دست آورد—موبایل میتواند به طور مستقیم به عنوان یک روور RTK پس از دریافت اصلاحات استفاده شود.
-
نرمافزار PC: تجسم مسیر، مشاهده دادهها و پیکربندی یککلیدی پایه/روور.
یادداشتها
-
سرعت پیشفرض 115 200 bps است. اگر فرکانس خروجی را افزایش دهید، سرعت را به طور متناسب افزایش دهید تا از سرریز جلوگیری شود (نرخ بالای عملی ≤ 5 Hz در لینکهای استاندارد).
-
توسعه سفارشی پشتیبانی میشود.
جزئیات
ماژول GPS موقعیتیابی تفاضلی با دقت بالا و دقت در سطح سانتیمتر. از GPS، GLONASS، Galileo، BeiDou پشتیبانی میکند. گیرنده چندباندی، فناوری RTK، PPS، TX1، TX2، USR، RTK، نشانگرهای PWR.
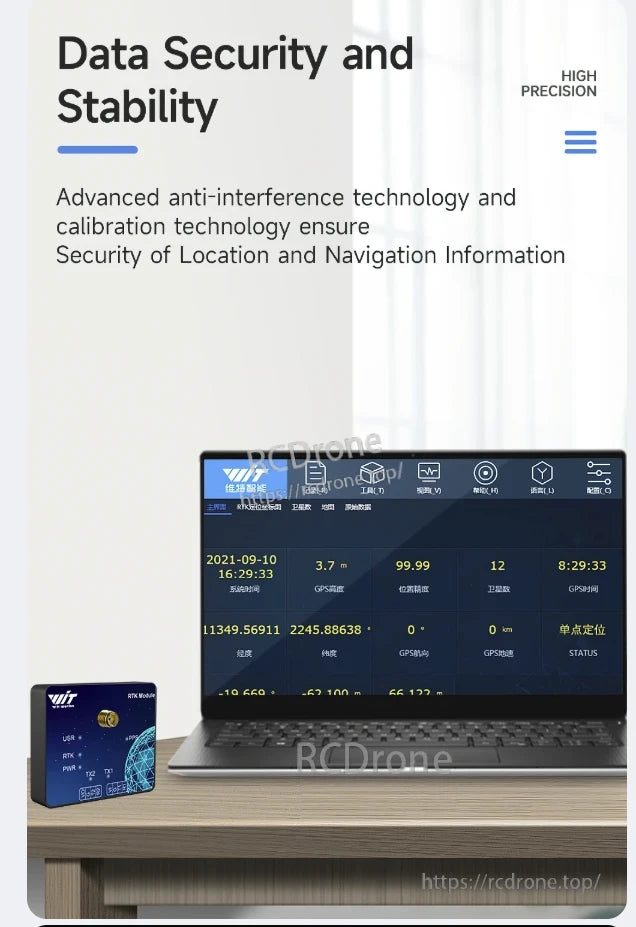
WitMotion WTRTK-M ZED-F9P RTK GNSS GPS با فناوری پیشرفته ضد تداخل و کالیبراسیون، امنیت و ثبات دادههای با دقت بالا را برای اطلاعات قابل اعتماد مکانیابی و ناوبری تضمین میکند.
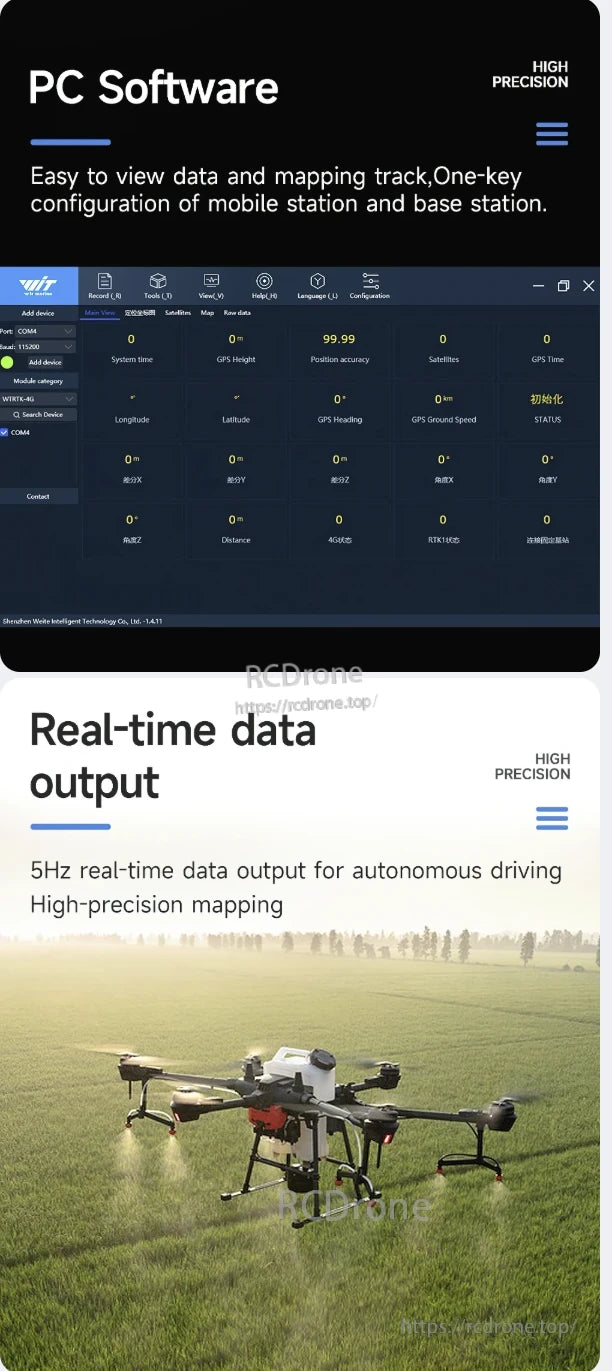
نرمافزار RTK GNSS GPS با دقت بالا و خروجی دادههای 5Hz به صورت بلادرنگ برای رانندگی خودکار و نقشهبرداری. از تنظیم یکدکمهای، ردیابی ماهواره، موقعیتیابی دقیق و تلمتری دقیق پشتیبانی میکند.
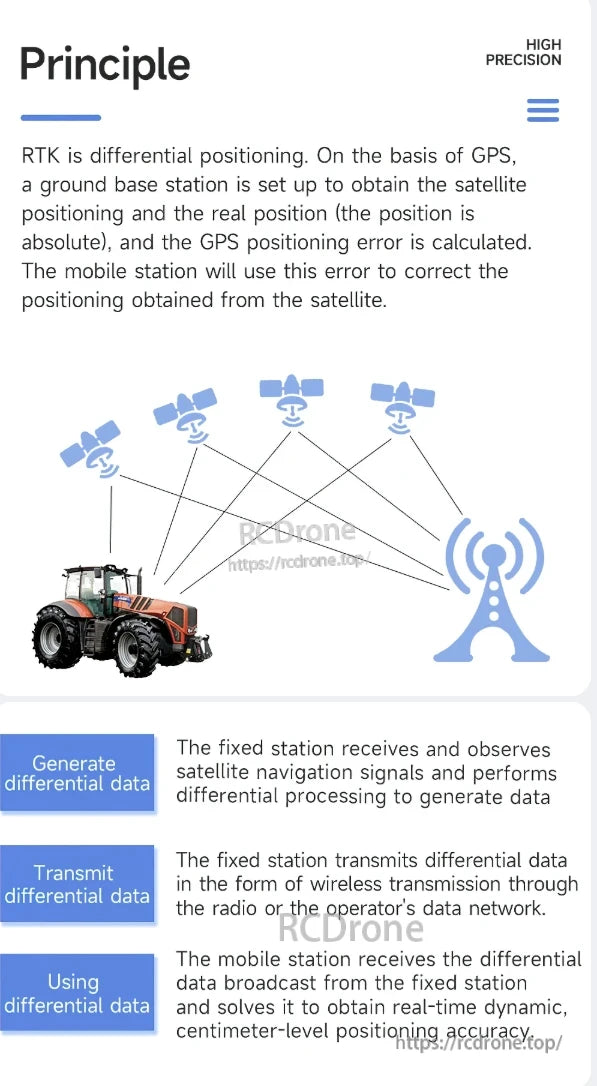
RTK از موقعیتیابی تفاضلی با GPS استفاده میکند. یک ایستگاه ثابت خطاهای موقعیتیابی ماهوارهای را محاسبه کرده و اصلاحات را به صورت بیسیم به یک ایستگاه متحرک ارسال میکند و دقت بلادرنگ در سطح سانتیمتر را برای ناوبری دقیق امکانپذیر میسازد.
WTRTK-M دارای ماژول RTK GNSS ZED-F9P با پشتیبانی از چندین صورت فلکی و دقت بالا (0.01m)، زمانهای شروع سریع، پروتکلهای متعدد و عملکرد در دمای -40 درجه سانتیگراد تا +85 درجه سانتیگراد.


نقشه اتصال سیمی برای ماژول RTK WitMotion: تنظیمات ایستگاه پایه/متحرک، آنتنهای SMA، اتصالات UART1 به کامپیوتر. شامل نرمافزار، راهنما، ویدیو و منابع پروتکل.
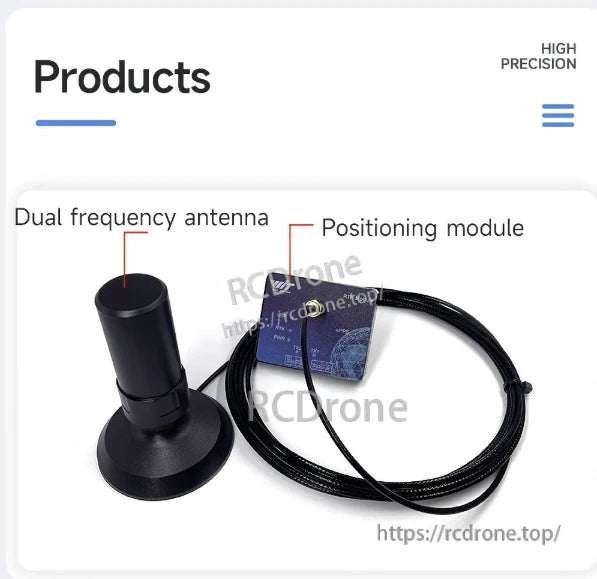
آنتن دو فرکانسه و ماژول موقعیتیابی برای GNSS GPS با دقت بالا
Related Collections








