






برد کنترل میکرو ROS مدل Yahboom YB-EET01-V2.0 برای رزبری پای ۵ ربات، ESP32-S3، ROS2
برد کنترل میکرو ROS مدل Yahboom YB-EET01-V2.0 برای رزبری پای ۵ ربات، ESP32-S3، ROS2
Yahboom
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
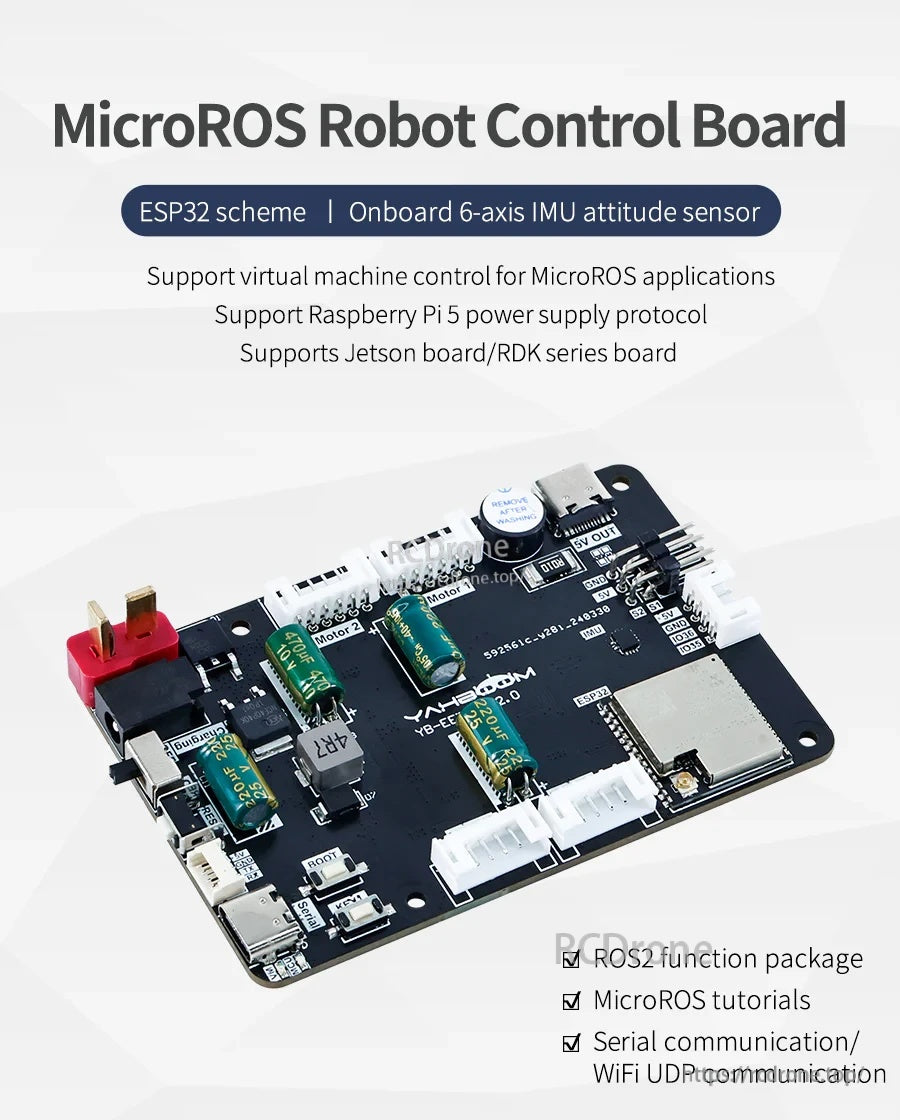
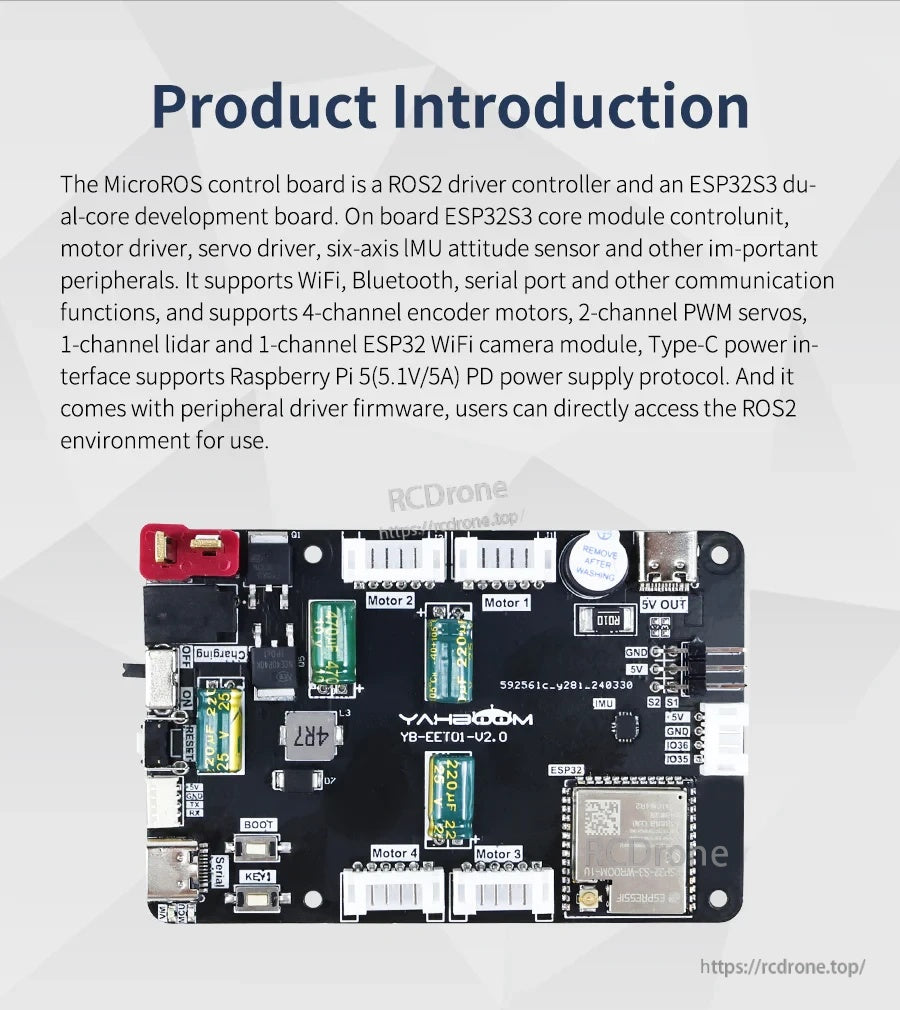
این برد کنترل Micro ROS (برد کنترل ربات MicroROS) یک برد گسترش کنترل ربات Raspberry Pi 5 است که برای پروژههای رباتیک ROS2 طراحی شده است. این برد یک پردازنده همکار ESP32-S3، درایو موتور انکودر 4 کاناله، خروجیهای سروو PWM 2 کاناله، یک رابط سری لیزر لیدار و یک سنسور وضعیت IMU 6 محوره داخلی را ادغام میکند. فریمور MicroROS قبل از ارسال برای ارتباط با دستگاههای دارای ROS2 پیشنصب شده است.
ویژگیهای کلیدی
- پردازنده همکار ESP32-S3 برای MicroROS: از توسعه MicroROS پشتیبانی میکند و میتواند در حالت LAN WiFi-UDP یا حالت ارتباط سریال استفاده شود.
- پشتیبانی از منبع تغذیه PD Raspberry Pi 5: رابط تغذیه Type-C از پروتکل منبع تغذیه PD Raspberry Pi 5 (5.1V/5A) پشتیبانی میکند.
- ادغام ورودی/خروجی ربات: درایو موتور 4 کاناله با اندازهگیری سرعت انکودر، دو رابط سروو PWM، رابط ارتباط لیدار، بوق، نشانگرهای LED و دکمههای سفارشی.
- روشهای ارتباطی متعدد: WiFi-UDP و پورت سریال؛ همچنین از ارتباط WiFi، بلوتوث و I2C پشتیبانی میکند.
- توجه به سیمکشی لیدار و موتور: تجهیزات لیدار/موتور باید با رابط و توالی خط برد مطابقت داشته باشد؛ لیدار MS200 و موتور 310 توصیه میشود.
- نسخه ROS: فقط از ROS2 پشتیبانی میکند (نه ROS1). شامل بسته عملکرد ROS2 و آموزشهای MicroROS است.
- آنتن خارجی شامل: آنتن تقویتکننده خارجی برای افزایش قابلیت اطمینان سیگنال بیسیم برای ارتباط WiFi و بلوتوث (رابط نسل اول IPEX).
مشخصات
| نوع محصول | برد کنترل Micro ROS / برد کنترل گسترش ربات Raspberry Pi 5 |
| علامتگذاری برد (مدل) | YB-EET01-V2.0 |
| پشتیبانی ROS | ROS2 |
| MicroROS | پشتیبانی |
| حالتهای ارتباطی | WiFi-UDP (LAN)، پورت سریال |
| ارتباطات دیگر | WiFi، بلوتوث، I2C |
| درایو موتور | موتور x4 (4-channel)، اندازهگیری سرعت انکودر x4؛ پشتیبانی از کنترل سرعت PID |
| خروجیهای سروو | رابط سروو PWM x2 |
| رابط لیدار | رابط سری لیزر لیدار x1 |
| پورت UART | UART یک کاناله (میتواند ماژول دوربین WiFi / ماژول دوربین WiFi ESP32 را متصل کند) |
| IMU | حسگر وضعیت IMU 6 محوره (شتابسنج 3 محوره + ژیروسکوپ 3 محوره) |
| سرعت ارتباط IMU I2C | 400KHz |
| نرخ خواندن دادههای IMU | 400Hz |
| GPIO سفارشی | GPIO سفارشی x2 |
| شاخصها & هشدارها | چراغ نشانگر LED x2، بوق |
| ولتاژ موتور پیشنهادی | 7.4V |
| رابط قدرت | نوع-C؛ از Raspberry Pi 5 (5.1V/5A) پروتکل منبع تغذیه PD |
| رابط آنتن | رابط آنتن نسل اول IPEX |
ماژول ESP32 (داخلی)
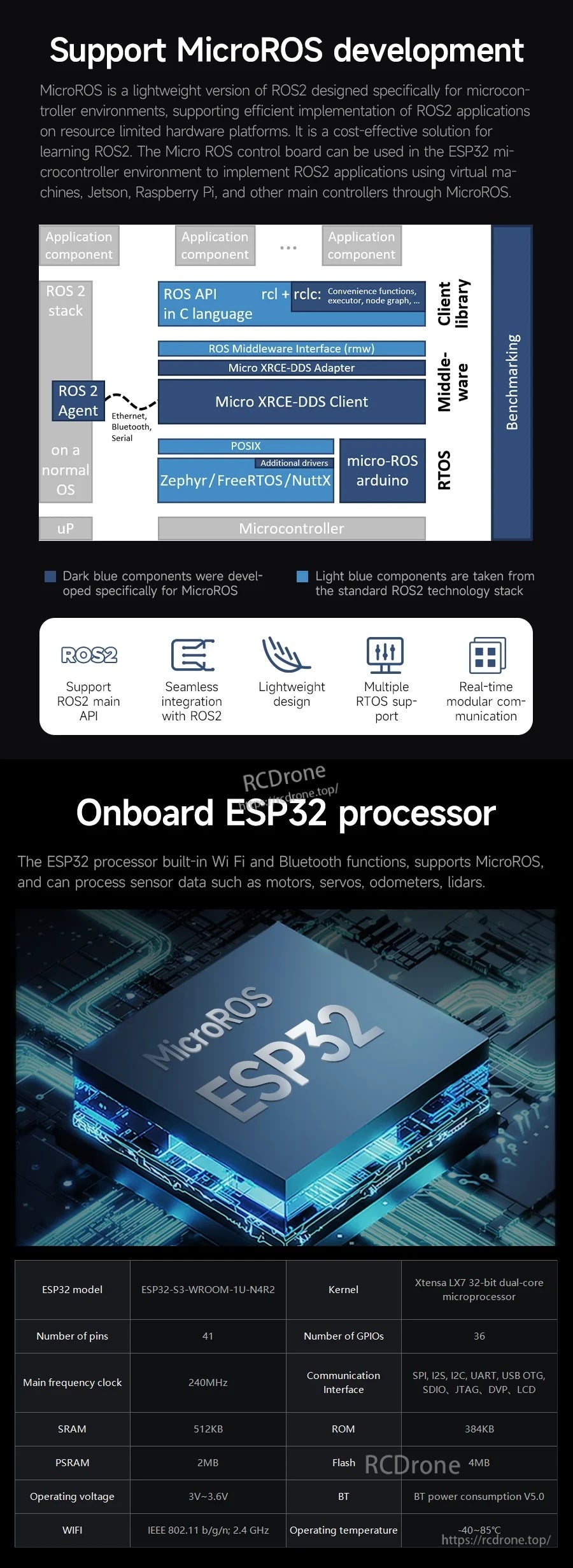
| مدل ESP32 | ESP32-S3-WROOM-1U-N4R2 |
| هسته | میکروپروسسور دو هستهای 32 بیتی Xtensa LX7 |
| ساعت فرکانس اصلی | 240MHz |
| تعداد پینها | 41 |
| تعداد GPIOها | 36 |
| رابط ارتباطی | SPI، I2S، I2C، UART، USB OTG، SDIO، JTAG، DVP، LCD |
| SRAM | 512KB |
| ROM | 384KB |
| PSRAM | 2MB |
| فلش | 4MB |
| ولتاژ عملیاتی | 3V~3.6V |
| WiFi | IEEE 802.11 b/g/n; 2.4 GHz |
| Bluetooth | V5.0 |
| دمای عملیاتی | -40~85C |
ترتیب خطوط رابط (طبق برچسب)
| کانکتور لیدار | MX1.25MM-4P |
| ترتیب پین لیدار | 5V, GND, TX, RX |
| کانکتور موتور | PH2.0MM-6P |
| ترتیب خط رابط موتور | H1B, H1A, 3V3, GND, M1-, M1+ |
کاربردها
- حالت ارتباط از راه دور: ماشین مجازی PC از طریق WiFi-UDP در LAN برای توسعه برنامههای ربات ROS ارتباط برقرار میکند.
- حالت اتصال برد توسعه: برد Raspberry Pi 5 / سری RDK / سری Jetson از طریق ارتباط سریالی برای توسعه برنامههای رباتیک ROS متصل میشود.
- حالت ESP32: میتواند به عنوان یک برد توسعه ESP32 برای رباتهای ROS استفاده شود.
برای سوالات مربوط به سازگاری و سیمکشی قبل از خرید، با [email protected] or تماس بگیرید https://rcdrone.top/.
راهنماها
جزئیات

پلتفرمهای رباتی سری Yahboom ROS را کشف کنید که میتوانند بر اساس سختافزار کنترل سازگار ROS2 ساخته شوند.

یک خودروی رباتی Raspberry Pi 5 بسازید که با ROS2 برای وظایفی مانند نقشهبرداری SLAM و ناوبری ارتباط برقرار کند.
مدل YB-EET01-V2.0 یک پردازنده همکار ESP32-S3 و IMU 6 محوره داخلی را برای ارتباط MicroROS با ROS2 ادغام میکند.

گزینههای ارتباطی WiFi-UDP و سریال به همراه رابطهای موتور، انکودر، IMU و لیدار پشتیبانی میشوند.
فریمور MicroROS از پیش نصب شده به اتصال برد کنترل به محیط ROS2 با حداقل تنظیمات کمک میکند.
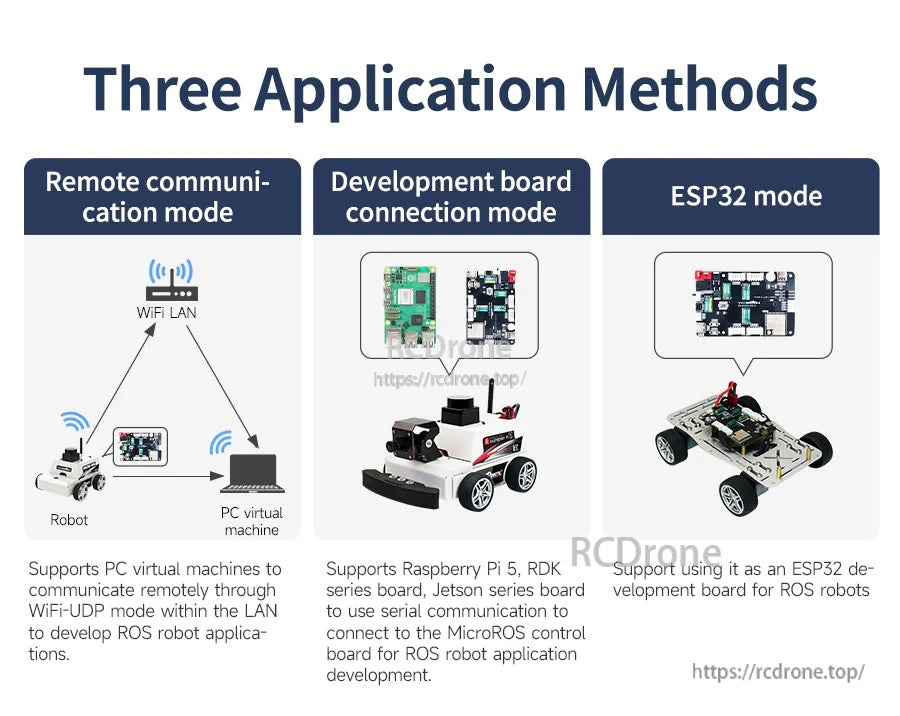
بین ارتباط از راه دور WiFi LAN، اتصال مستقیم به برد توسعه، یا استفاده از حالت ESP32 برای پروژههای ROS انتخاب کنید.
پردازش onboard ESP32-S3 توسعه MicroROS و اتصال انعطافپذیر برای برنامههای رباتیک ROS2 را امکانپذیر میسازد.
پشتیبانی کامل از سیستم ROS2 تأکید شده است، با مستندات مربوطه و منابع پشتیبانی فنی.

ارتباط از راه دور از طریق WiFi-UDP میتواند با یک ماشین مجازی PC، Raspberry Pi، یا تنظیمات مبتنی بر Jetson استفاده شود.
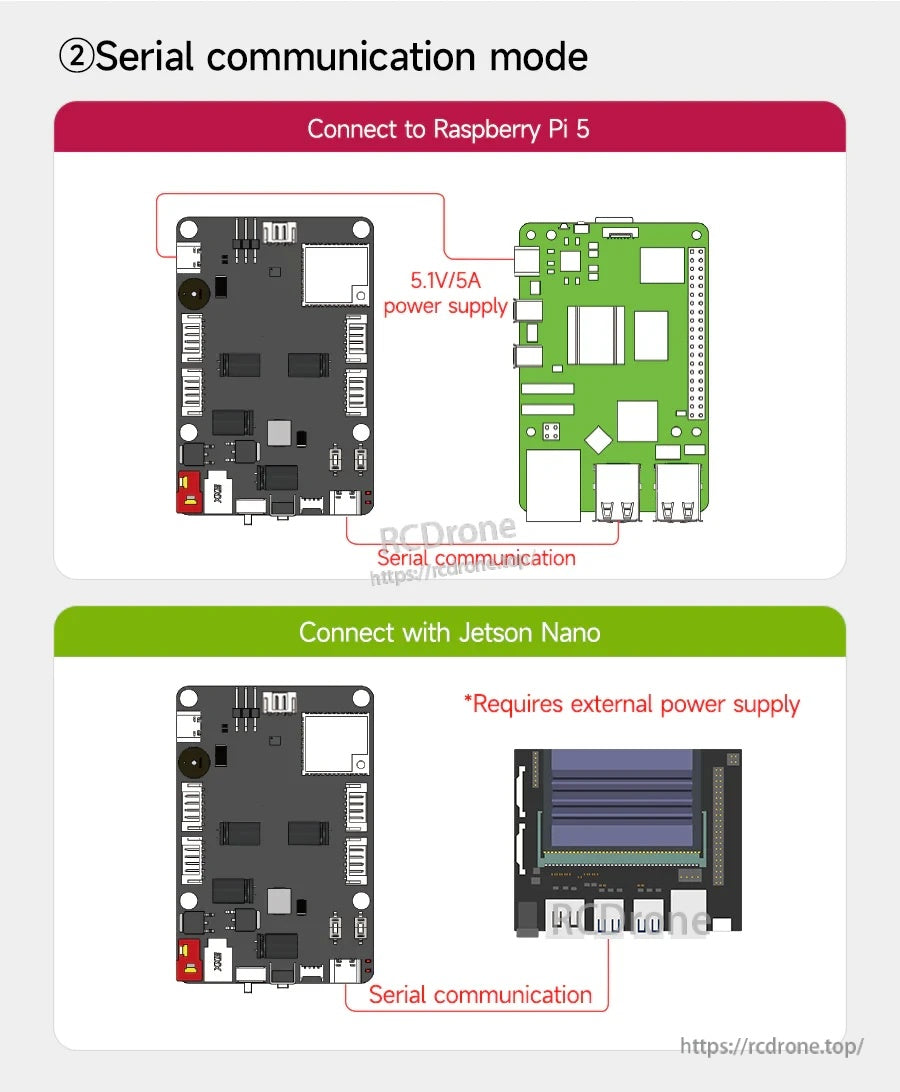
حالت سریال گزینهای برای اتصال مستقیم به Raspberry Pi 5 فراهم میکند، با یادداشت قدرت خارجی جداگانه برای Jetson Nano.
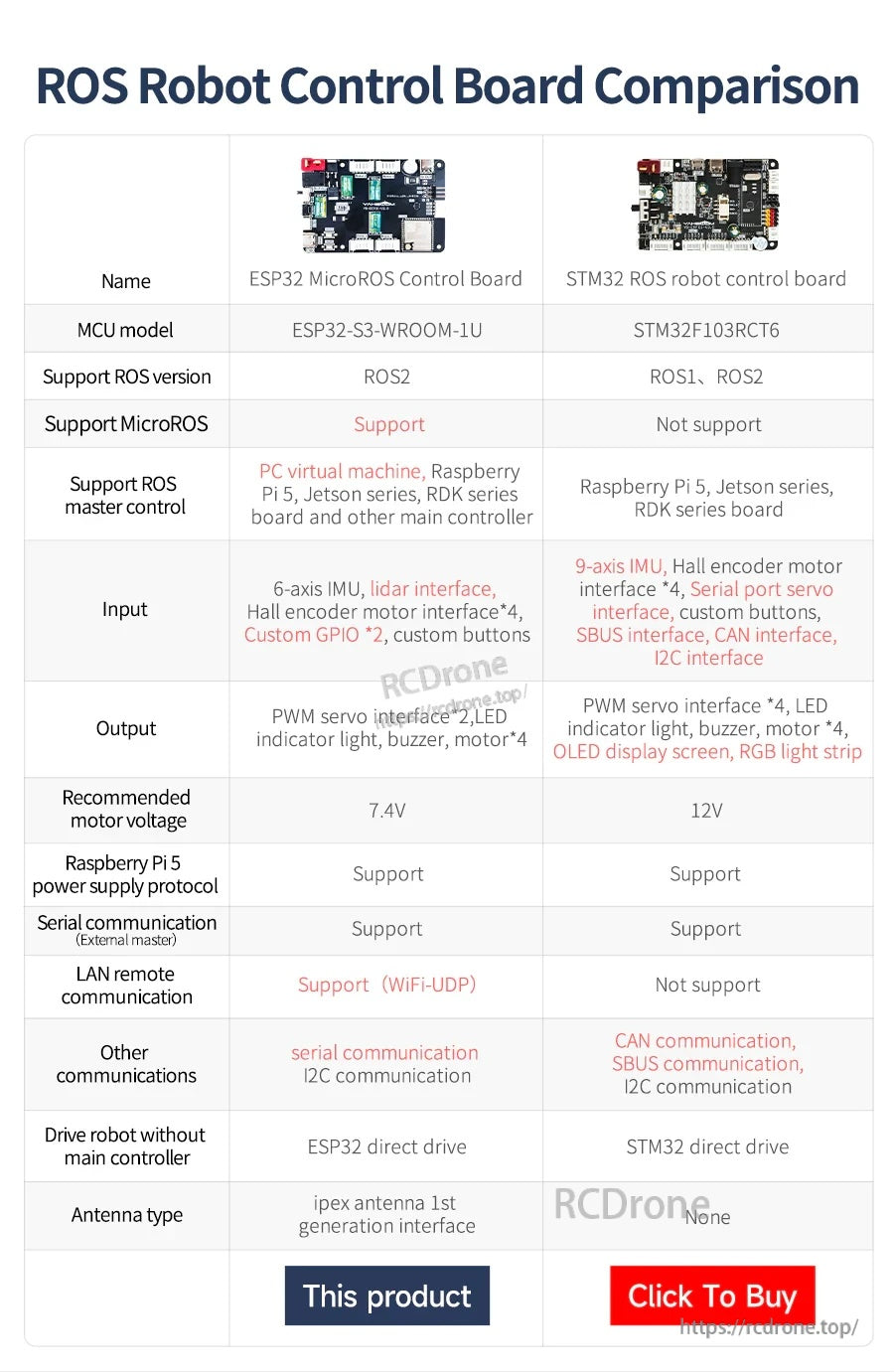
یک مقایسه کنار هم به روشن شدن تفاوتها در پشتیبانی از ROS، رابطها و روشهای ارتباطی کمک میکند.
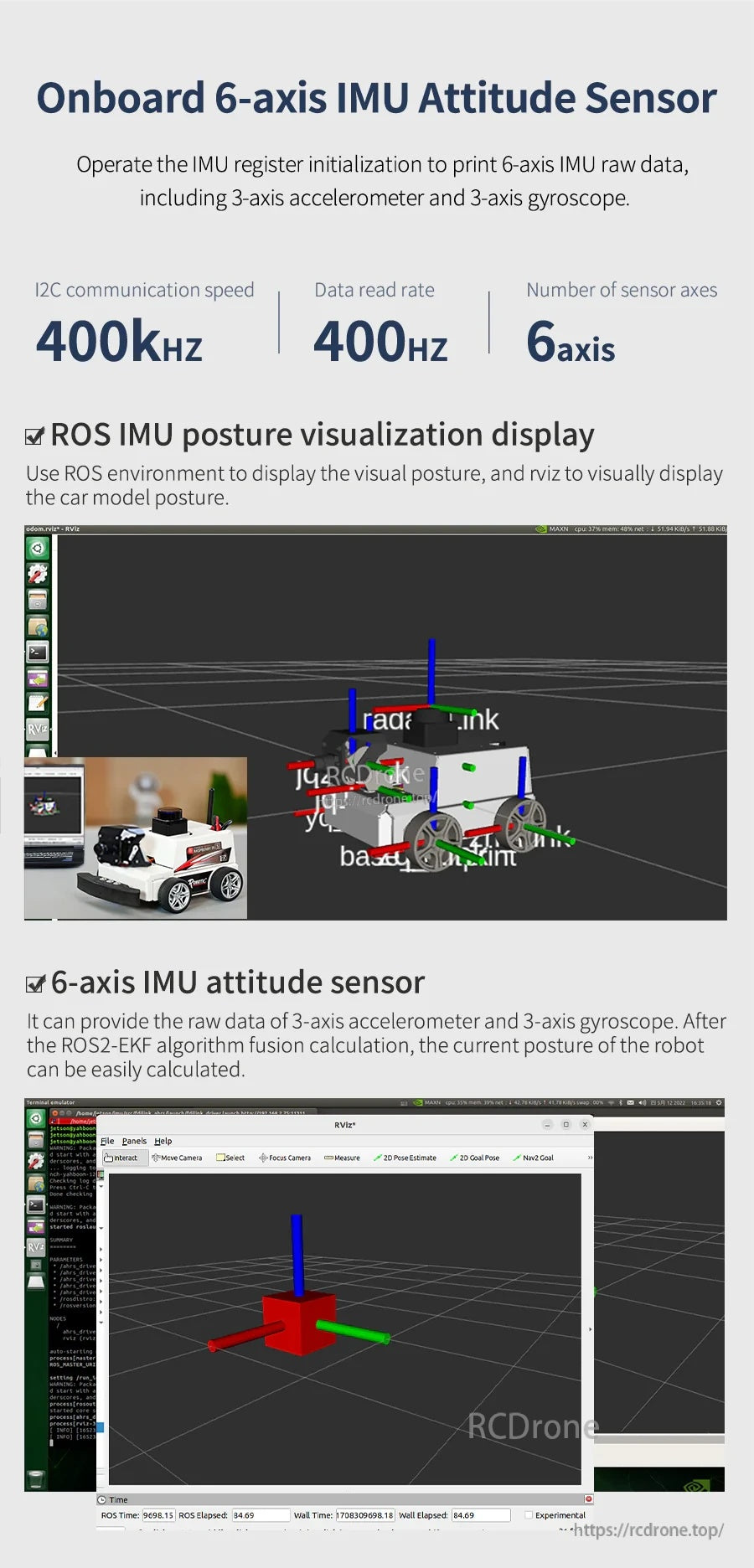
IMU شش محوره داخلی از ارتباط I2C با سرعت بالا و بهروزرسانیهای مکرر داده برای تجسم وضعیت در ROS پشتیبانی میکند.
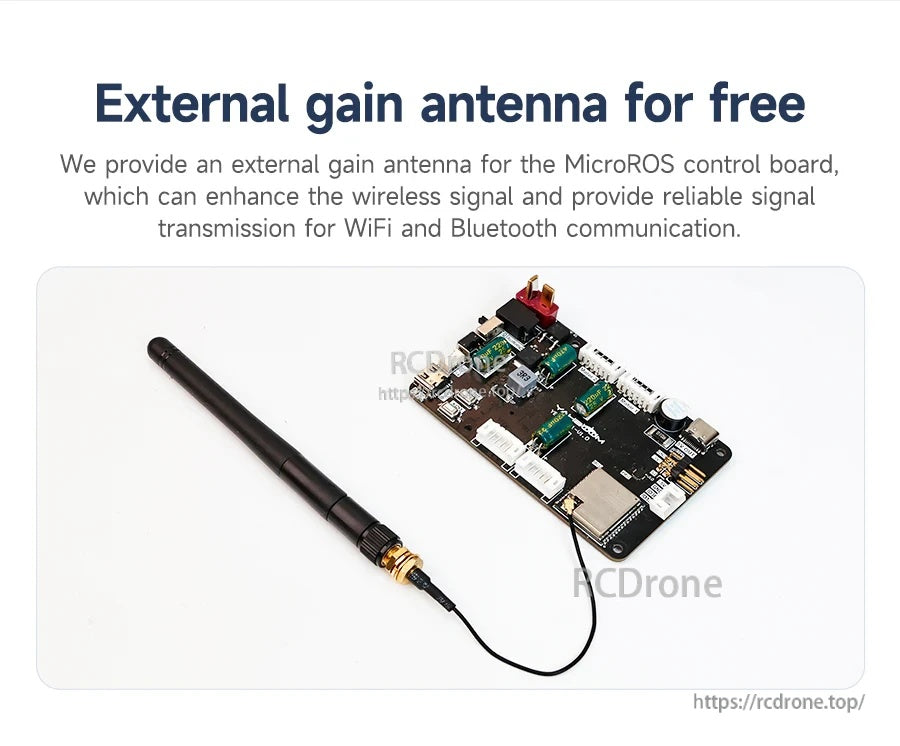
یک آنتن تقویتکننده خارجی برای بهبود قابلیت اطمینان بیسیم برای ارتباط WiFi و Bluetooth گنجانده شده است.
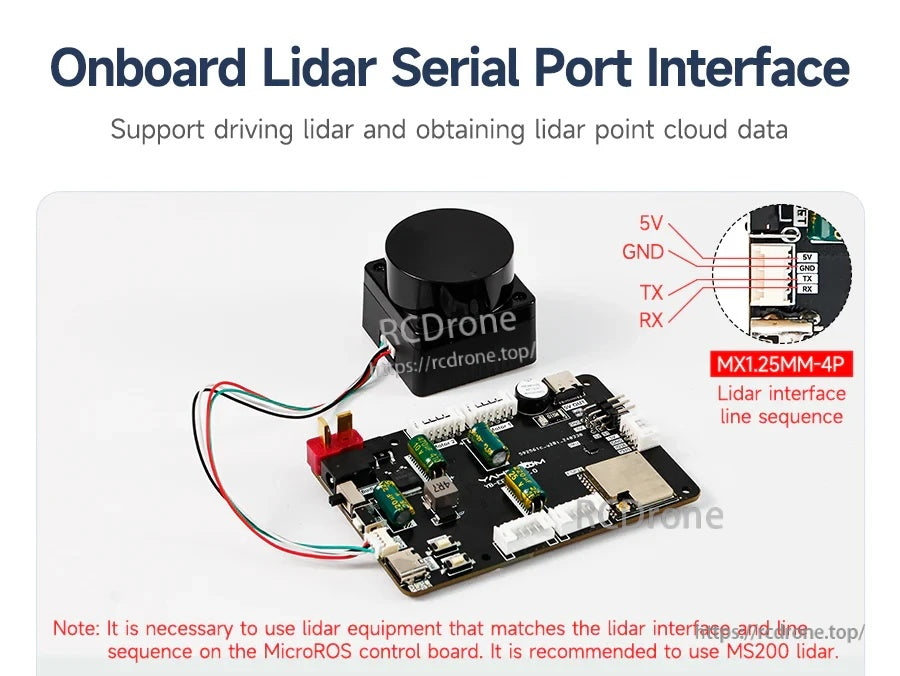
یک رابط سری لیزر لایدار اختصاصی با توالی پین واضح به سادهسازی ادغام لایدار برای رباتهای ROS2 کمک میکند.
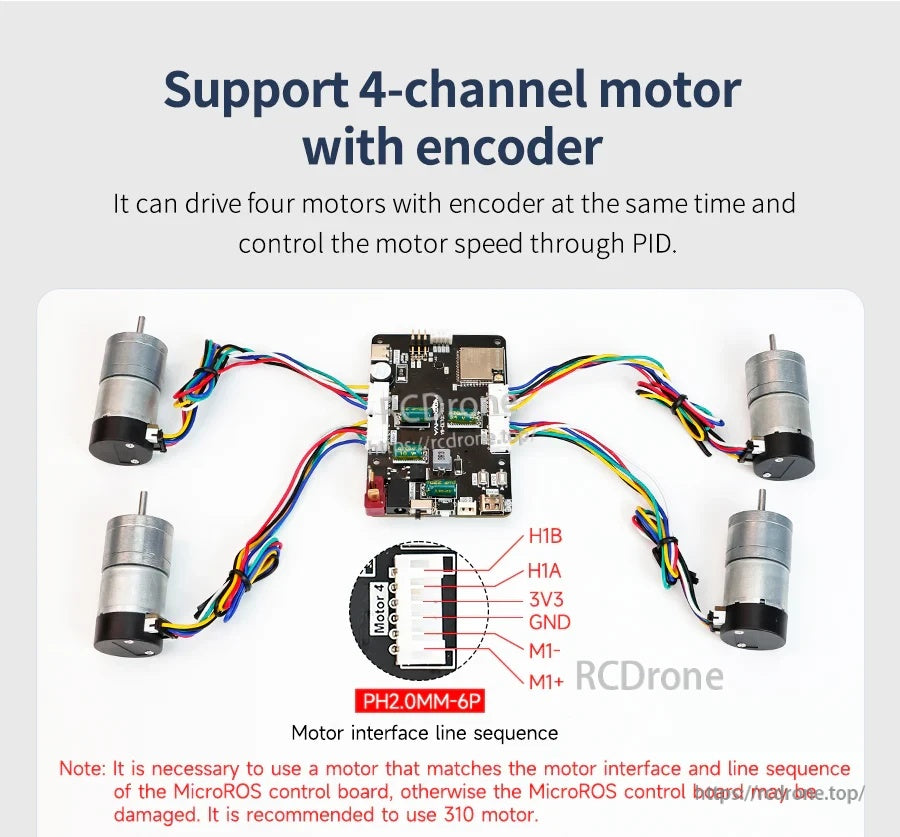
تا چهار موتور انکودر را راهاندازی کنید و سیمکشی را با توالی کانکتور برچسبگذاری شده برای کنترل پایدار همراستا نگه دارید.


دو خروجی سرو PWM 5V از ماژولهای معمولی سروو مانند گیمبالهای کوچک پشتیبانی میکند.


برد کنترل میکرو ROS2 از طریق رابط GPIO داخلی خود به ماژول دوربین WiFi ESP32 متصل میشود تا ادغام دوربین انجام شود.

ماژول دوربین WiFi ROS2 به عنوان یک افزودنی اختیاری برای ساخت رباتهای سازگار با Raspberry Pi در دسترس است.

برد کنترل YB-EET01-V2.0 شامل یک سیستم تأمین برق 5.1V/5A با حفاظت در برابر معکوس، اتصال کوتاه و اضافه بار است.
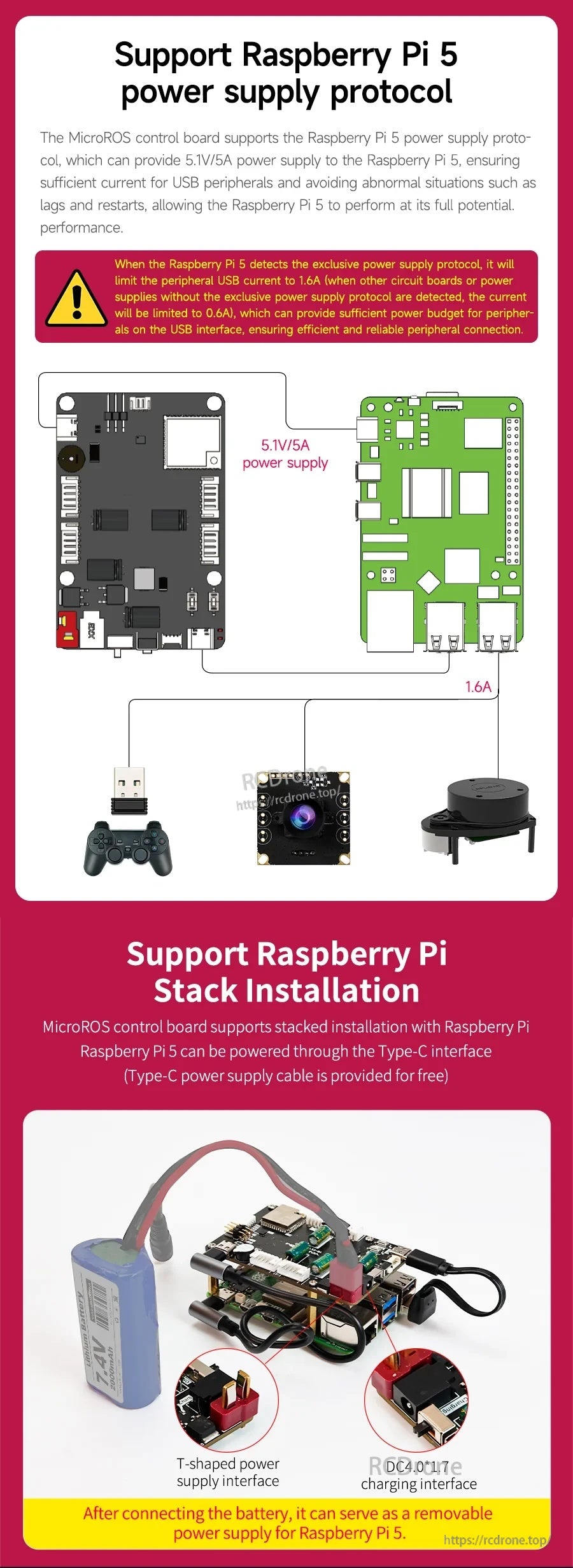
برد کنترل میکرو ROS Yahboom از پروتکل تأمین برق Raspberry Pi 5 و یک طراحی قابل انباشته با ورودی برق 5V/5A پشتیبانی میکند.

مواد و کدهای متن باز از روالهای توسعه Micro ROS2 مانند رانندگی موتور، کنترل سروو PWM و خواندن حسگر پشتیبانی میکنند.
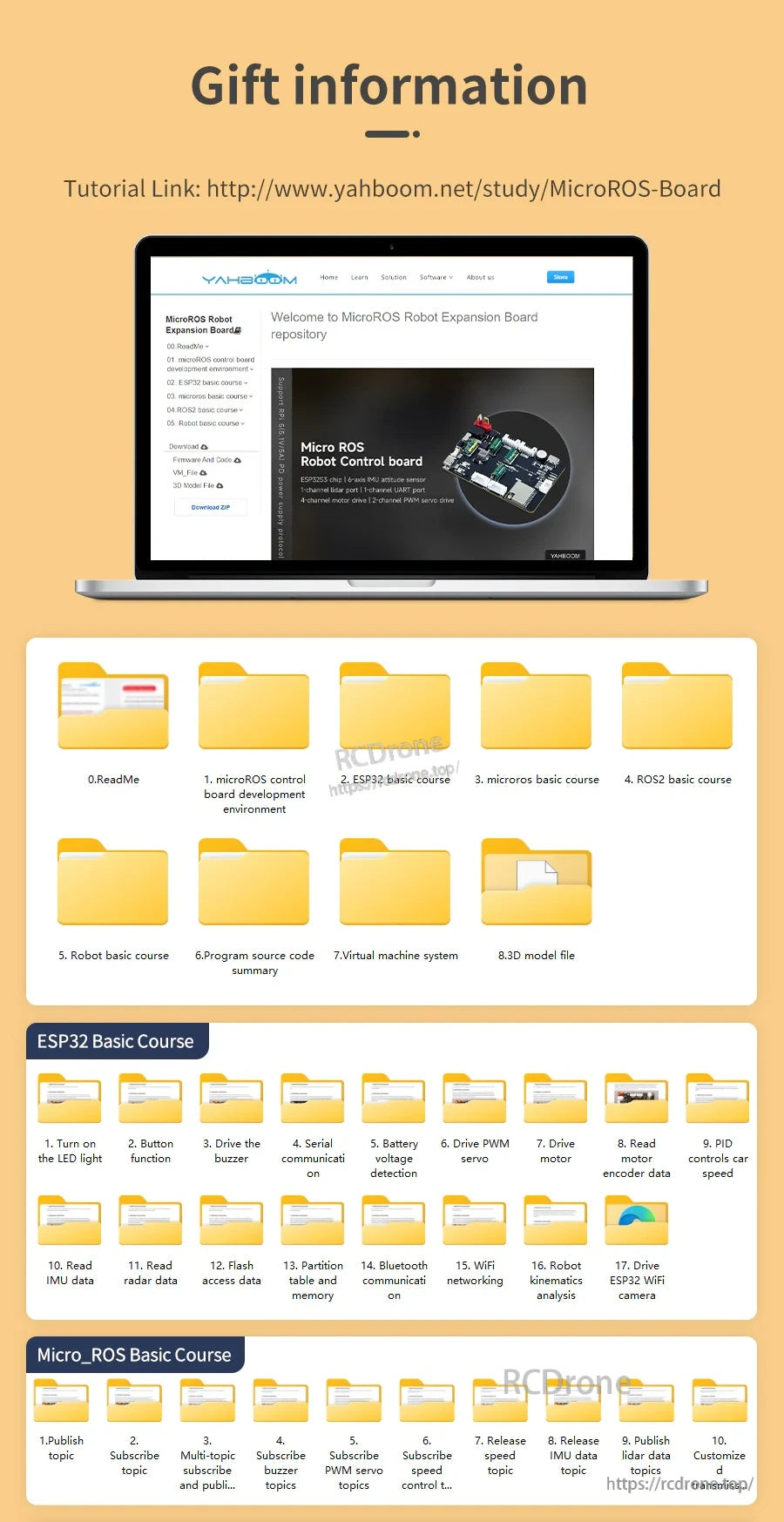
Yahboom یک لینک آموزشی و فایلهای دوره قابل دانلود برای مبانی ESP32 و micro-ROS ارائه میدهد تا از راهاندازی و یادگیری پشتیبانی کند.
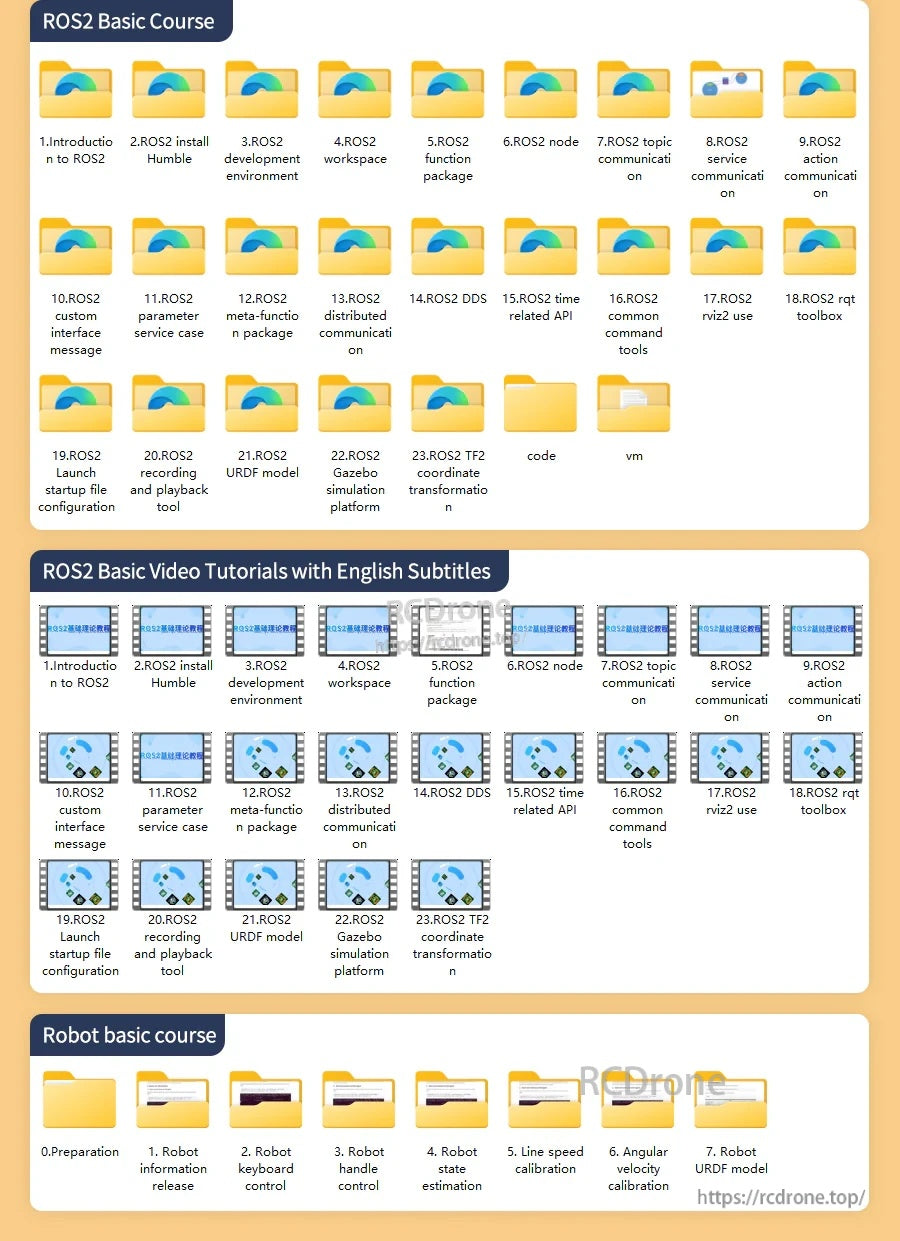
فایلهای دوره پایه ROS2، ویدیوهای آموزشی با زیرنویس انگلیسی و یک دوره مبانی رباتیک منابع یادگیری ساختاریافتهای برای پروژههای ROS2 فراهم میکنند.

Yahboom YB-EET01-V2.0 برد کنترل میکرو ROS در ساخت خودروهای رباتیک میکرو ROS و Raspberry Pi 5 برای پروژههای مبتنی بر ROS2 استفاده میشود.
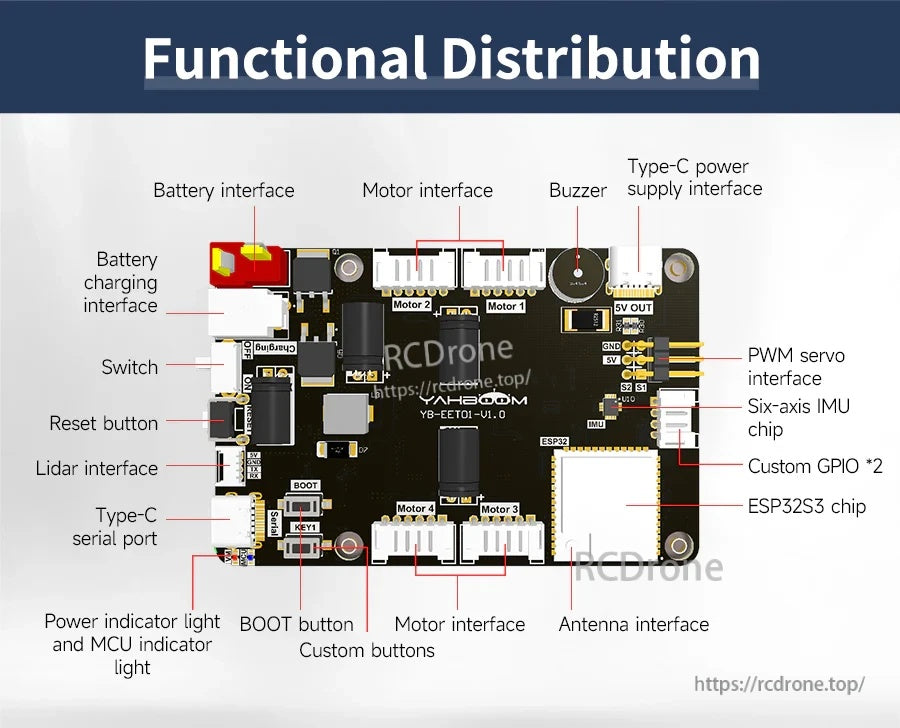
برد YB-EET01-V2.0 اتصالات برچسبگذاری شدهای برای شارژ باتری، خروجیهای موتور، USB-C قدرت/سریال، سرووهای PWM، LiDAR و ماژول ESP32-S3 ارائه میدهد.
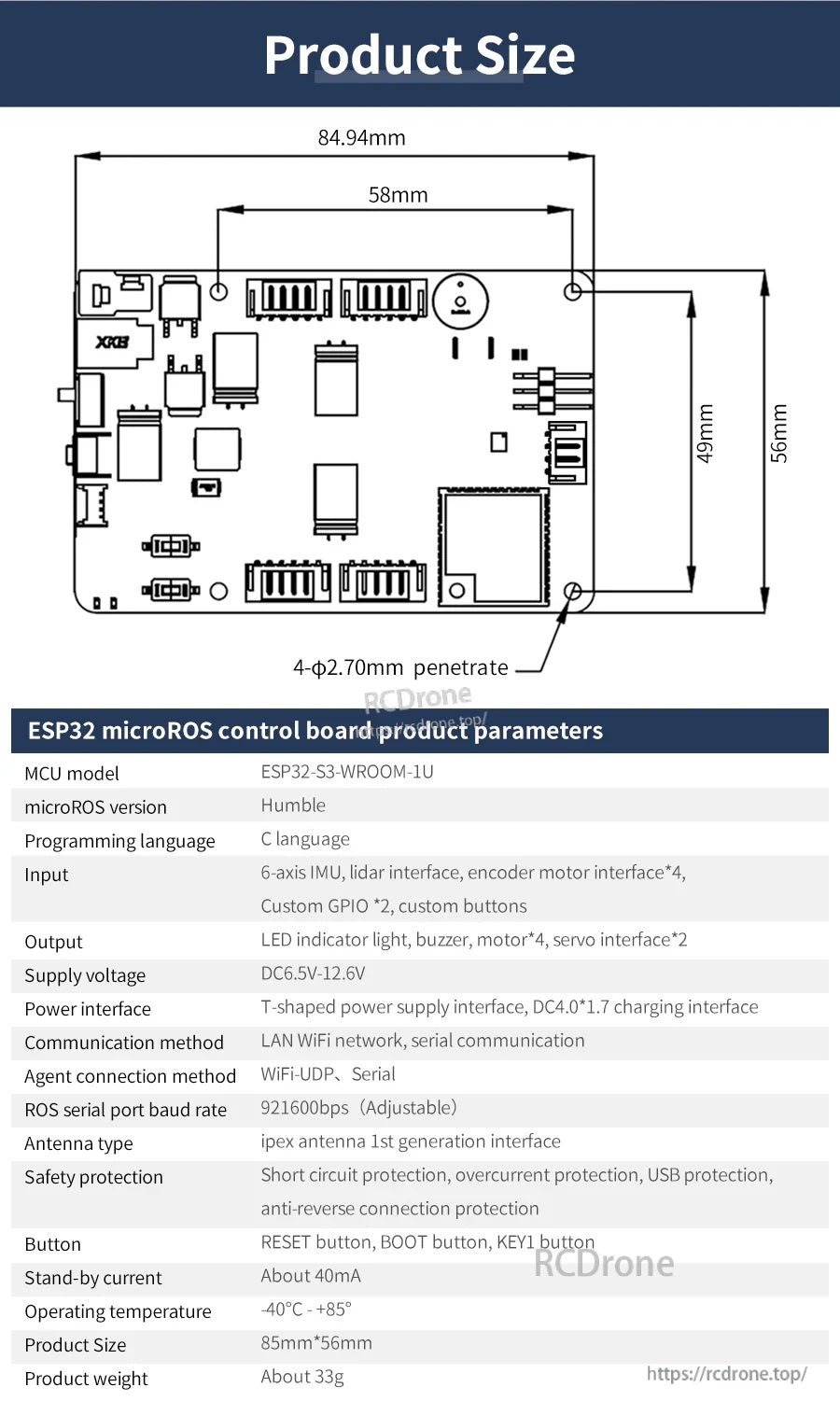
برد کنترل میکرو-ROS ESP32-S3 حدود 85×56 میلیمتر اندازه دارد و شامل اتصالات برچسبگذاری شده برای موتور، سروو و رابطهای حسگر به همراه دکمههای RESET/BOOT است.

بسته شامل برد کنترل ربات میکروROS ESP32 به همراه یک کابل داده USB‑C، یک کابل قدرت Type‑C دو سر، یک آنتن و سختافزار نصب است.
Related Collections






