Kit de développement de drone d'assemblage CQ230 - Raspberry Pi 4B Pixhawk Ardupilot Kit de drone de bricolage programmable industriel open source avec support anti-collision
Kit de développement de drone d'assemblage CQ230 - Raspberry Pi 4B Pixhawk Ardupilot Kit de drone de bricolage programmable industriel open source avec support anti-collision
RCDrone
Impossible de charger la disponibilité du service de retrait
Aperçu
Le kit de développement de drone d'assemblage CQ230 est un kit compact et open source Drone à faire soi-même plateforme propulsée par le Raspberry Pi 4B et Pixhawk Contrôleur de vol. Doté d'un empattement de 230 mm, d'un cadre anti-collision et d'un système d'alimentation 4S (16,8 V), ce drone est idéal pour apprendre et expérimenter des fonctionnalités programmables open source. La plate-forme est entièrement équipée pour des tâches telles que la navigation par points de cheminement, la surveillance des données et la diffusion vidéo en temps réel, ce qui en fait un excellent choix pour les développeurs et les débutants.
Caractéristiques principales
- Conception compacte:Avec une taille de 360 mm x 360 mm x 300 mm, le drone est idéal pour les petits espaces.
- Support anti-collision:Le cadre anti-collision entièrement en fibre de carbone garantit durabilité et protection.
- Intégration du Raspberry Pi 4B:Amélioré avec Ubuntu 20.04 pour un fonctionnement et un développement fluides.
- Cadre Open Source: Alimenté par Ardupilot, prenant en charge Dronekit, MAVLink et ROS.
- Programmable Tâches:Capable de navigation autonome, de surveillance des données en temps réel et de traitement visuel.
- Navigation par points de cheminement: Définissez des itinéraires avec une précision basée sur le GPS.
- Transmission de données en temps réel:Transfert de données via WiFi vers des stations terrestres.
- Navigation visuelle:Systèmes à double caméra pour une navigation intérieure précise et l'évitement des obstacles.
- Commandes programmables:Utilisez Dronekit-Python pour créer des commandes de vol personnalisées.
- Simulation de système:Combinez la simulation SITL pour des tests de fonctionnalités transparents.
Caractéristiques
| Paramètre | Détails |
|---|---|
| Modèle | CQ230 |
| Empattement | 230 mm |
| Batterie | 4S (16,8 V) |
| Durée du vol | 7 minutes |
| Capacité de charge utile | 200g |
| Résistance au vent | Niveau 3-4 |
| Vitesse maximale | 20 km/h |
| Altitude de vol maximale | 120 m |
| Précision de positionnement | 2-3 m (GPS) |
| Poids | 612g |
| Portée de la télécommande | 700 m |
Emballer
Version de base
- Contrôleur de vol Pixhawk 2.4.8 ×1
- GPS M8N ×1
- Module d'alimentation Ledi MINI PIX ×1
- Télémétrie WiFi CUAV ×1
- Contrôleur de vitesse 30 A × 4
- Hélice 5045 ×4
- Cadre CQ230 × 1
- Chargeur d'équilibre A400 × 1
- Batterie 4S 2300mAh ×1
- Moteur 2205 ×4
- Télécommande FS-i6 ×1
- Alarme sonore BB ×1
- Module de flux optique MF-01 × 1
Version visuelle
- Pixhawk 2.4.Compagnie de vol 8contrôleur ×1
- GPS M8N ×1
- Module d'alimentation Ledi MINI PIX ×1
- Caméra CS ×1
- Contrôleur de vitesse 30 A × 4
- Hélice 5045 ×4
- Cadre CQ230 × 1
- Alarme sonore BB ×1
- Module de flux optique MF-01 × 1
- Chargeur d'équilibre A400 × 1
- Batterie 4S 2300mAh ×1
- Moteur 2205 ×4
- Télécommande FS-i6 ×1
- Ordinateur de bord Raspi 4B-4G ×1 Set
- Caméra visuelle T265 ×1
Applications
- Livraison:Transportez efficacement des objets légers.
- Développement éducatif:Idéal pour les étudiants et les chercheurs souhaitant explorer les systèmes de drones.
- Traitement visuel:Utilisez OpenCV pour le streaming et l'analyse vidéo avancés.
- Expériences de navigation:Expérimentez le vol autonome basé sur le GPS et le suivi de position.
Notes complémentaires
- Le système comprend Ubuntu 20.04 pour une interface de programmation améliorée.
- L'écosystème robuste d'Ardupilot garantit l'évolutivité et la polyvalence des applications de drones.
- Un kit d'apprentissage complet avec des tutoriels fournis pour les débutants et les professionnels.
Détails
Système de drone open source CQ230

Pixhawk : système matériel pour drone
Utilise le contrôleur Pixhawk 2.4.8, équipé du nouveau processeur standard 32 bits STM32F427 et associé au baromètre 5611. Il s'agit d'un contrôleur open source économique doté de riches options d'interface.

ArduPilot : système logiciel pour drone
Le système logiciel du drone, essentiellement le micrologiciel de contrôle, utilise le projet open source largement adopté ArduPilot.
(ArduPilot fournit un système logiciel de pilote automatique open source avancé, complet et fiable.)
Il peut contrôler tous les systèmes de drones imaginables. Pour ceux qui aiment la technologie, les drones et l'exploration, la compréhension d'ArduPilot vous fera découvrir un monde fascinant et engageant.

ArduPilot a été installé dans plus d'un million de systèmes de drones dans le monde. Équipé d'outils avancés d'enregistrement, d'analyse et de simulation de données, il s'agit d'un système de pilotage automatique entièrement testé et fiable. Il est également utilisé par de grandes organisations et entreprises telles que la NASA, Intel, Insitu, Boeing et de nombreux instituts et universités du monde entier pour les tests et le développement.

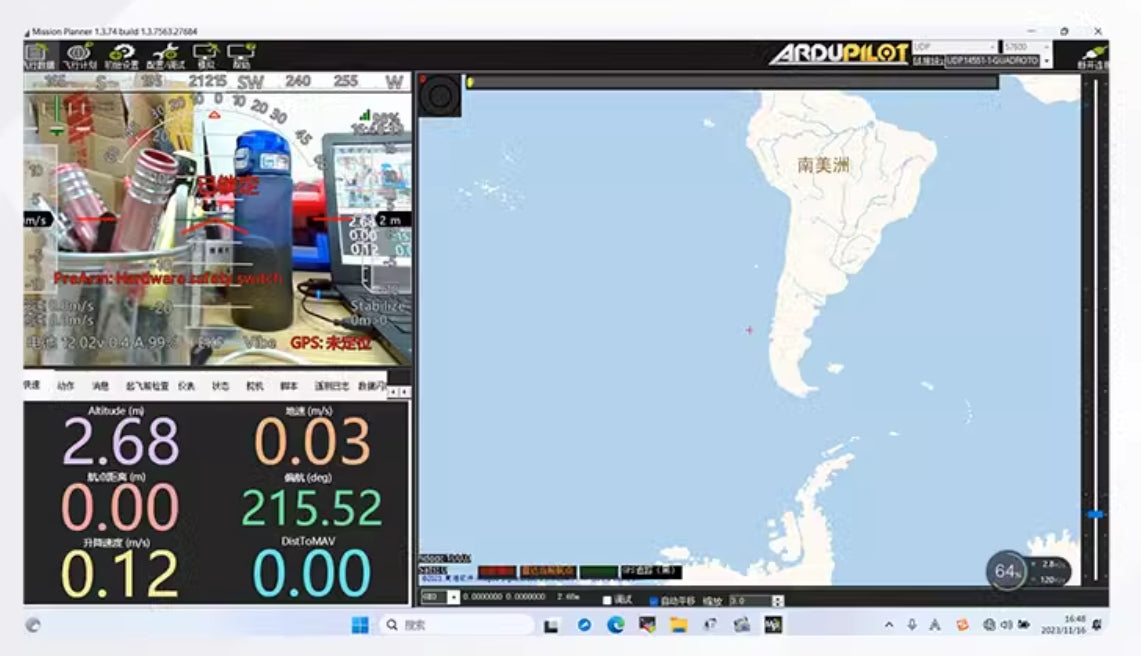
Planificateur de mission Station de contrôle au sol
Caractéristiques:
- Outils de réglage et de configuration des paramètres des drones ;
- Définissez des trajectoires de vol sur des cartes, permettant aux drones de suivre automatiquement des itinéraires prédéfinis ;
- Sélectionnez les commandes de mission dans les menus déroulants pour contrôler le drone ;
- Télécharger et analyser les journaux ;
- Réaliser des simulations à l'aide du système SITL (Software In The Loop) ;
- D'autres fonctionnalités attendent votre découverte, et les possibilités ne s'arrêtent pas là...


| Fonctionnalités prédéfinies | Version de base | Version visuelle |
|---|
| Dessin au trait | ✓ | ✓ |
| Maintien de l'altitude, vol stationnaire, stabilisation | ✓ | ✓ |
| Retour à la maison, retour en toute sécurité | ✓ | ✓ |
| Atterrissage, atterrissage avec batterie faible | ✓ | ✓ |
| Positionnement GPS extérieur et vol d'itinéraire | ✓ | ✓ |
| Dronekit - Contrôle programmable Python | ✓ | ✓ |
| Télémétrie WiFi pour la transmission de données en temps réel (portée d'environ 5 m) | ✗ | ✓ |
| Positionnement du flux optique en intérieur, fixation de l'altitude par laser | ✓ | ✓ |
| Navigation de positionnement visuel double en intérieur, points d'ancrage MP, vol d'itinéraire, atterrissage précis avec reconnaissance de code QR | ✗ | ✓ |
Adapté au vol en intérieur
Conception compacte avec des dimensions de 360 mm × 360 mm × 300 mm, idéale pour les opérations dans des espaces restreints.

Cadre en fibre de carbone, solide et résistant aux chutes

La conception de l'anneau anti-collision protège efficacement le moteur et les pales de l'hélice pour assurer la sécurité du vol ;

Extensibilité améliorée pour le développement fonctionnel multi-scénarios
Basé sur le modèle de base, le système ajoute Raspberry Pi 4B et a intégré le système Raspberry Pi. Ce système comprend :
- Ubuntu 20.04 (système d'exploitation open source avec interface graphique)
- Kit de drones en Python (une bibliothèque Python pour programmer le contrôle des drones à l'aide de Dronekit)
- Lien Pymav (une implémentation Python du protocole MAVLink, permettant le contrôle programmable des drones à l'aide de Pymavlink)
- ROS (Système d'exploitation du robot)
- Mavros (un protocole de communication pour contrôler les drones via ROS)
- Gstreamer (transmission en streaming vidéo à faible latence)
- Routeur Mavlink (distribue les données du contrôleur de vol MAVLink à différents points de terminaison)
- OpenCV (bibliothèque de logiciels open source pour le traitement de la vision par ordinateur)

Sur la base du système ci-dessus, le drone peut réaliser :
- Contrôle de drone programmable avec Dronekit-Python
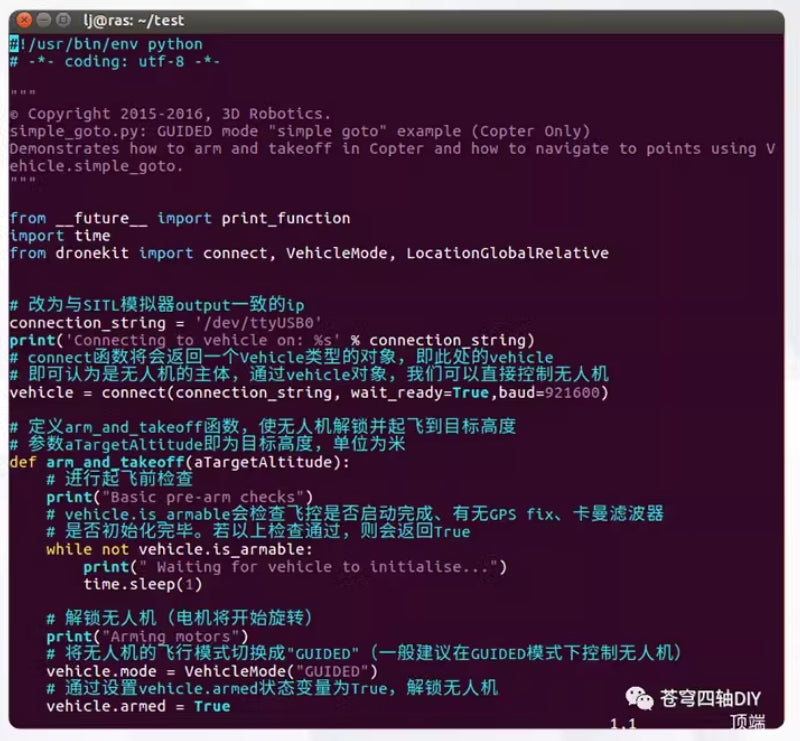
2. OUVRIR le CV Traitement visuel
Ajout d'une caméra CSI, permettant la transmission d'images et le post-traitement :
- Les flux visuels peuvent être capturés à l'aide de Raspberry Pi et traités avec des outils comme OpenCV.
- Les flux vidéo HD en temps réel peuvent également être retransmis vers un PC pour traitement ou envoyés vers un appareil mobile pour examen.

3. Transmission vidéo HD en temps réel
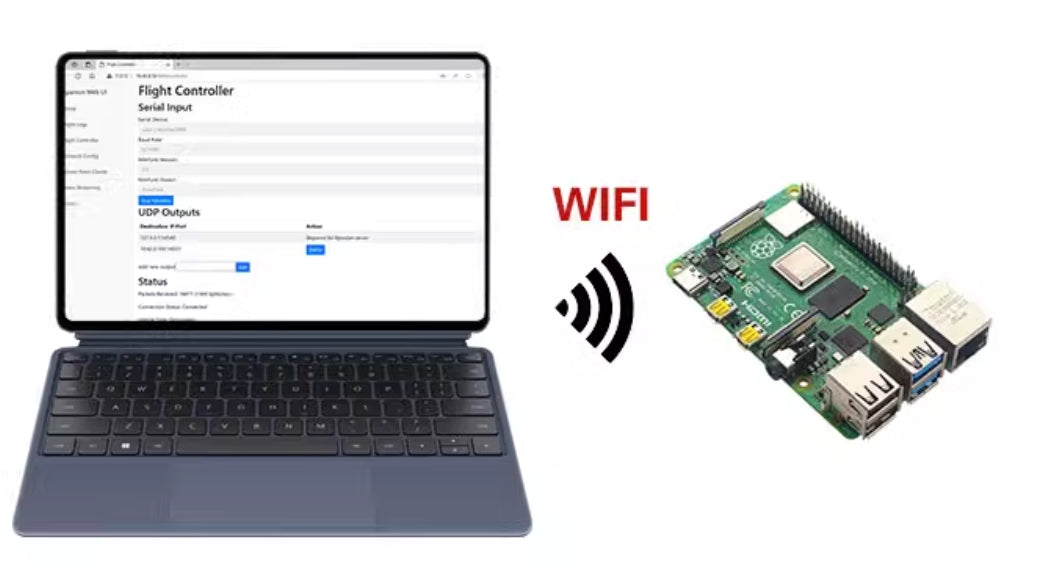
4.Surveillance des données de la station terrestre
La communication et la transmission d'images entre le réseau WiFi et la station terrestre PC (MP) peuvent être réalisées sans nécessiter de modules de transmission supplémentaires. Une fois le PC connecté au point d'accès WiFi du 4B, la transmission de données et d'images peut être initiée en accédant à 10.42.0.10:3000 via un navigateur Web.
5. Développement de fonctionnalités supplémentaires et vérification d'algorithmes basés sur le système open source ci-dessus
Tutoriels de support de la version visuelle :
En plus des tutoriels de la version de base, des tutoriels d'introduction au traitement visuel du Raspberry Pi sont également fournis.