Contrôleur de vol pilote automatique Holybro Pixhawk 5X
Contrôleur de vol pilote automatique Holybro Pixhawk 5X
HolyBro
Impossible de charger la disponibilité du service de retrait
Le Pixhawk® 5X est la dernière mise à jour de la famille à succès de Pixhawk® contrôleurs de vol, basés sur la norme ouverte Pixhawk® FMUv5X et la norme de bus de pilote automatique Pixhawk®. Il est livré avec le dernier pilote automatique PX4® préinstallé, à triple redondance, à température contrôlée et à domaine de capteur isolé, offrant des performances et une fiabilité incroyables.
À l'intérieur du Pixhawk® 5X, vous pouvez trouver un STM32F7 basé sur STMicroelectronics®, associé à la technologie de capteur de Bosch®, InvenSense®, vous offrant flexibilité et fiabilité pour contrôler tout véhicule autonome, adapté aux applications académiques et commerciales. Le microcontrôleur F7 du Pixhawk® 5X dispose de 2 Mo de mémoire flash et de 512 Ko de RAM. Le pilote automatique PX4 profite de la puissance et de la RAM accrues. Grâce à la puissance de traitement mise à jour, les développeurs peuvent être plus productifs et efficaces dans leur travail de développement, ce qui permet de réaliser des algorithmes et des modèles complexes.
La norme ouverte FMUv5X intègre des IMU hautes performances et à faible bruit, conçues pour une meilleure stabilisation. IMU triplement redondant et baromètre doublement redondant sur des bus séparés. Lorsque le pilote automatique PX4 détecte une défaillance d'un capteur, le système bascule de manière transparente vers un autre pour maintenir la fiabilité du contrôle de vol.
Un LDO indépendant alimente chaque ensemble de capteurs avec un contrôle de puissance indépendant. Des isolations antivibratoires nouvellement conçues pour filtrer les vibrations à haute fréquence et réduire le bruit afin de garantir des lectures précises, permettant aux véhicules d'atteindre de meilleures performances de vol globales. Le bus de capteur externe (SPI5) dispose de deux lignes de sélection de puce et de signaux prêts à recevoir des données pour des capteurs supplémentaires et une charge utile avec interface SPI, et avec un PHY Ethernet Microchip intégré (LAN8742AI-CZ-TR), la communication à haut débit avec les ordinateurs de mission via Ethernet est désormais prise en charge. Deux ports de surveillance de batterie intelligents (SMBus), prise en charge du module d'alimentation SMBus INA226.
Le Pixhawk® 5X est parfait pour les développeurs des laboratoires de recherche d'entreprise, des startups, des universitaires (recherche, professeurs, étudiants) et des applications commerciales. Le Pixhawk 5X est compatible avec les deux PX4 Pilote automatique & Micrologiciel Ardupilot.
Note:
- Le Pixhawk 5X nécessite le protocole I2C pour les données de tension et de courant du module d'alimentation tel que PM02D, les modules d'alimentation analogiques (PM02, PM06, PM07) ne sont pas compatibles avec Pixhawk 5X. Tableau comparatif des modules d'alimentation
- Il est livré avec le firmware PX4 par défaut. L'utilisateur peut également utiliser le firmware Ardupilot en flashant le firmware via Mission Planner ou QGroundControl.
Points clés de la conception
- Contrôleur de vol modulaire : IMU, FMU et système de base séparés connectés par un connecteur de bus de pilote automatique Pixhawk® à 100 broches et 50 broches, conçu pour des systèmes flexibles et personnalisables
- Redondance : 3 capteurs IMU et 2 capteurs barométriques sur des bus séparés, permettant un fonctionnement parallèle et continu même en cas de panne matérielle
- Domaines de redondance triple : domaines de capteurs complètement isolés avec des bus séparés et un contrôle de puissance séparé
- Système d'isolation des vibrations pour filtrer les vibrations à haute fréquence et réduire le bruit afin de garantir des lectures précises
- Interface Ethernet pour l'intégration d'ordinateurs de mission à haut débit
- Étalonnage automatique du capteur éliminant les variations de signaux et de température
- Les IMU sont contrôlées en température par des résistances chauffantes intégrées, permettant une température de fonctionnement optimale des IMU
Spécifications techniques
- Processeur FMU : STM32F765
- Arm® Cortex®-M7 32 bits, 216 MHz, 2 Mo de mémoire, 512 Ko de RAM
- Processeur d'E/S : STM32F100
- Arm® Cortex®-M3 32 bits, 24 MHz, 8 Ko de SRAM
- Capteurs embarqués
- Accélérateur/Gyro : ICM-20649 (monté en dur)
- Accélérateur/Gyro : ICM-42688P (montage souple)
- Accélérateur/Gyro : ICM-20602 ou BMI088 (Montage souple)
- Mag: BMM150
- Baromètre : 2x BMP388
Données électriques
- Tension nominale :
- Tension d'entrée maximale : 6 V
- Entrée d'alimentation USB : 4,75~5,25 V
- Entrée du rail servo : 0~36 V
Interfaces
- 16- Sorties servo PWM
- Entrée R/C pour Spektrum / DSM
- Entrée R/C dédiée pour entrée PPM et S.Bus
- Entrée analogique / PWM RSSI dédiée et S.Sortie de bus
- 4 ports série à usage général
- 3 avec contrôle de débit complet
- 1 avec limite de courant séparée de 1 A
- 1 avec I2C et ligne GPIO supplémentaire pour lecteur NFC externe
- 2 ports GPS
- 1 port GPS complet plus interrupteur de sécurité
- 1 port GPS de base
- 1 port I2C
- 1 port Ethernet
- Applications sans transformateur
- 100 Mbps
- 1 bus SPI
- 2 lignes de sélection de puces
- 2 lignes prêtes à l'emploi
- 1 ligne SPI SYNC
- 1 ligne de réinitialisation SPI
- 2 bus CAN pour périphérique CAN
- Le bus CAN dispose de commandes silencieuses individuelles ou d'un contrôle ESC RX-MUX
- 2 ports d'entrée d'alimentation avec SMBus
- 1 port AD et E/S
- 2 entrées analogiques supplémentaires
- 1 entrée PWM/Capture
- 2 lignes de débogage et GPIO dédiées
Données mécaniques
- Dimensions
- Module de contrôleur de vol : 38,8 x 31,8 x 14,6 mm
- Mini plinthe : 43,4 x 72,8 x 14,2 mm
- Plinthe standard v1 : 52,4 x 103,4 x 16,7 mm
- Plinthe standard v2A : 40,2 x 92,3 x 18,4 mm
- Plinthe standard v2B : 40,2 x 98,3 x 16,9 mm
- Poids
- Module de contrôleur de vol : 23 g
- Mini plinthe : 26.8g
- Plinthe standard v1 : 51 g
- Plinthe standard v2A : 58 g
- Plinthe standard v2B : 58 g
Le SKU 11045 comprend :
- Module de contrôleur de vol Pixhawk 5X
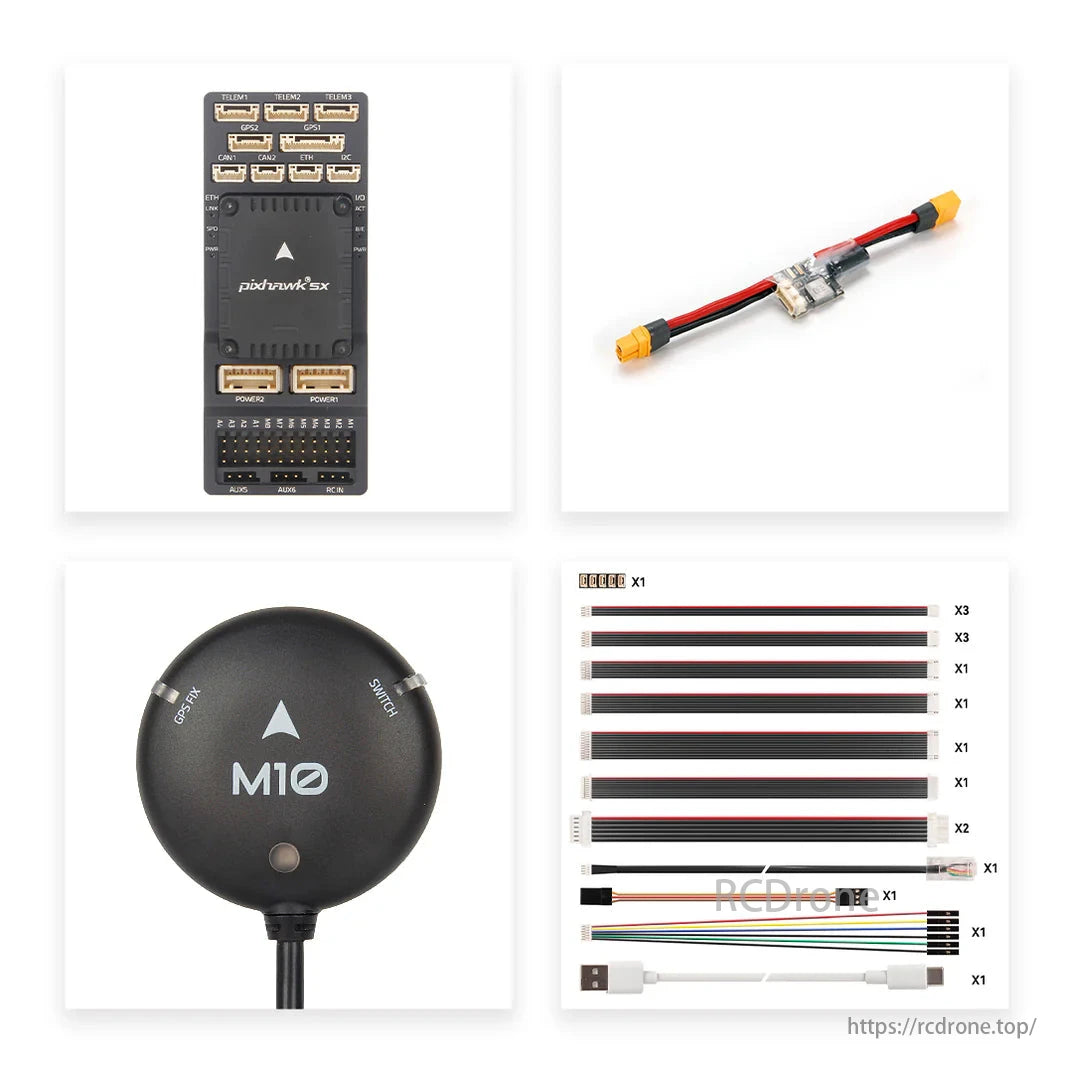
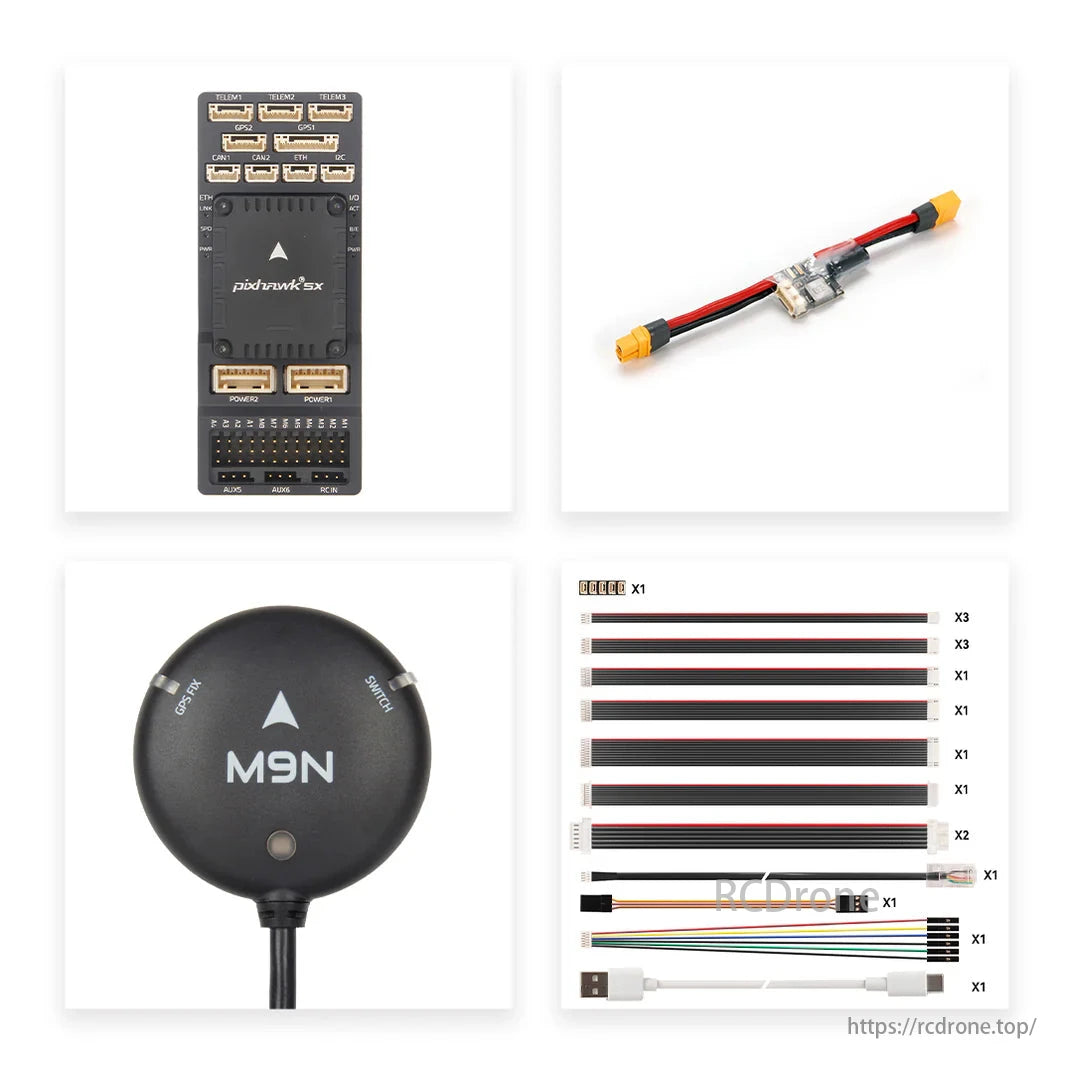
Le SKU 20307/SKU 20320/SKU20310 comprend :
- Module de contrôleur de vol Pixhawk 6X
- Plinthe standard v2A/v2B ou mini plinthe
- Module d'alimentation haute tension PM02D
- Jeu de câbles
- Module de contrôleur de vol Pixhawk 6X
- Plinthe standard v2A/v2B ou mini plinthe
- Module d'alimentation haute tension PM02D
- Jeu de câbles
- M9N/M10 GPS
Le Pixhawk mini, le Pixhawk Baseboard v1 et deux variantes du Pixhawk Baseboard v2 (v2A et v2B) sont présentés avec leurs dimensions. Le mini mesure 43,4 x 72,8 mm, le v1 mesure 52 x 101,90 mm, le v2A mesure 40,2 x 92,3 mm et le v2B mesure 40,2 x 98,3 mm.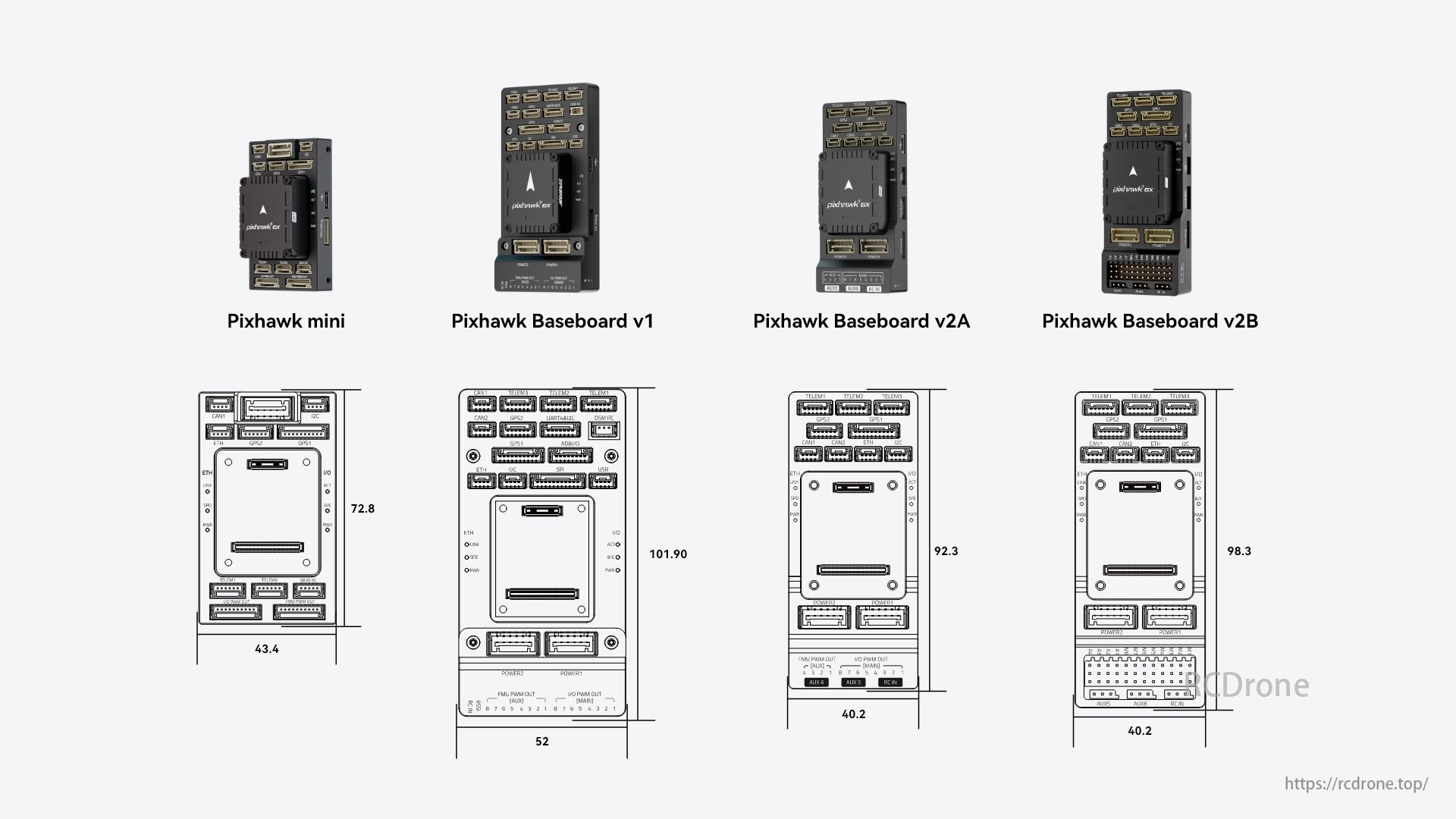
Guide d'échantillons de câblage

Le schéma Holybro Pixhawk 5X comprend le GPS primaire et secondaire, les ports UART4 et I2C, CAN1 et 2, le récepteur DSM RC, la radio de télémétrie, la caméra IP HD FPV, la batterie, le module d'alimentation, les ESC et une carte de distribution d'alimentation.
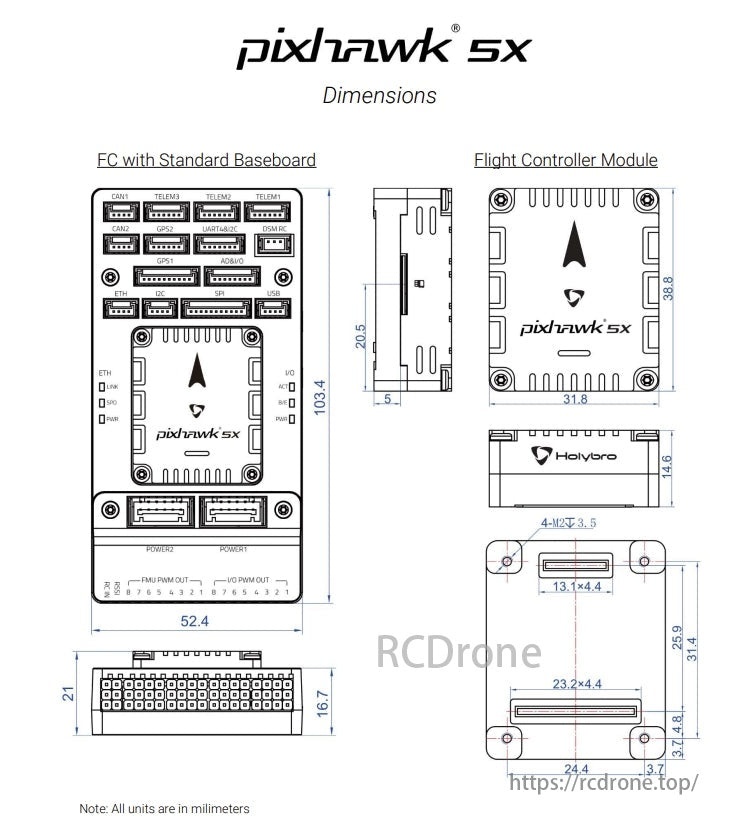
Les dimensions du Pixhawk SX incluent un module de contrôleur de vol et un FC avec une carte de base standard. Le module mesure 31,8 x 38,8 mm, tandis que la carte de base mesure 103,4 x 52,4 mm. Toutes les unités sont en millimètres.

Dimensions standard de la carte mère : 103,4 x 58 x 10,7 mm, avec divers ports et connecteurs, notamment des entrées USB, Ethernet et d'alimentation.


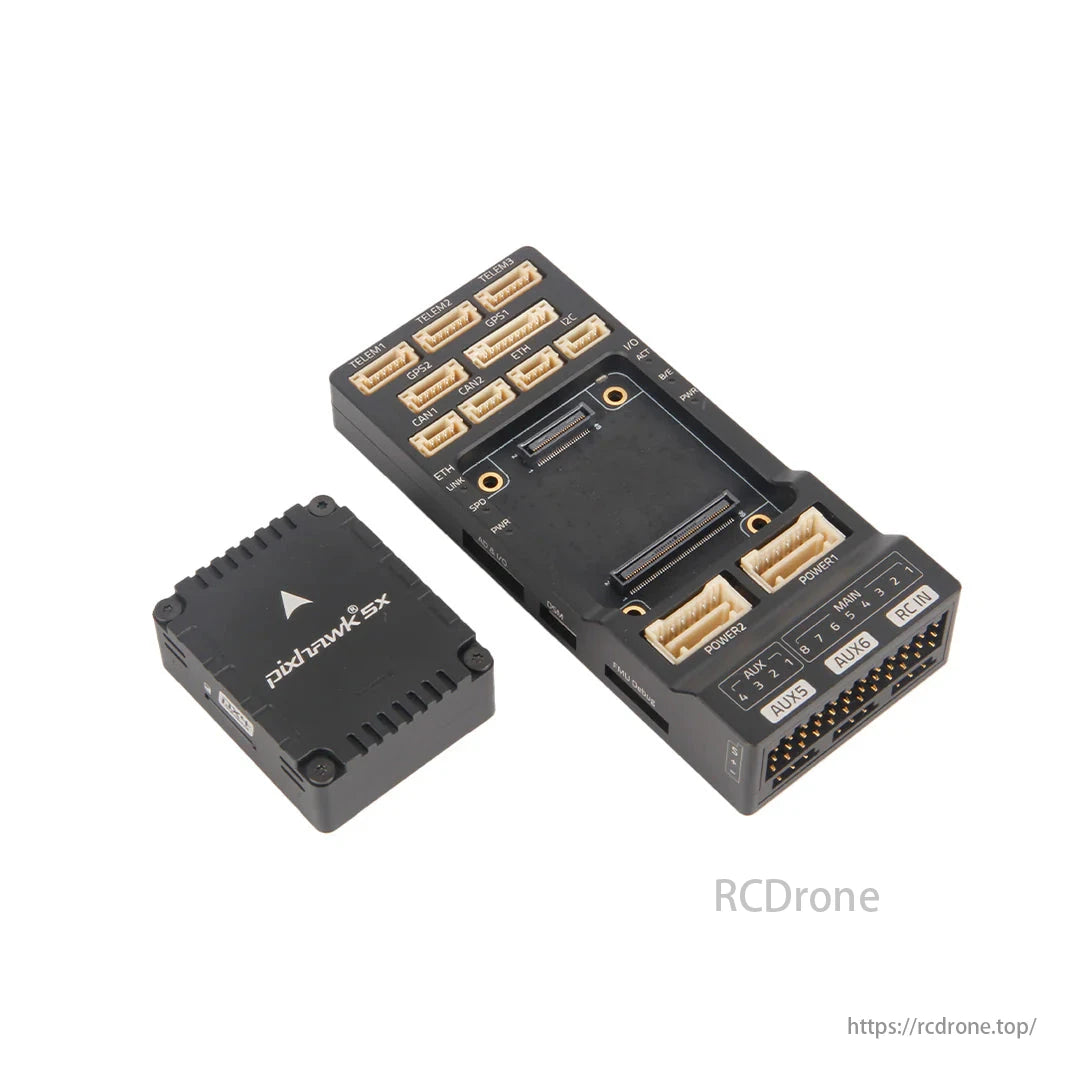
Contrôleur de vol Pixhawk 5X avec ports TELEM1-3, GPS1-2, CAN1-2, ETH, I2C, POWER1-2, AUX5-6 et RC IN.
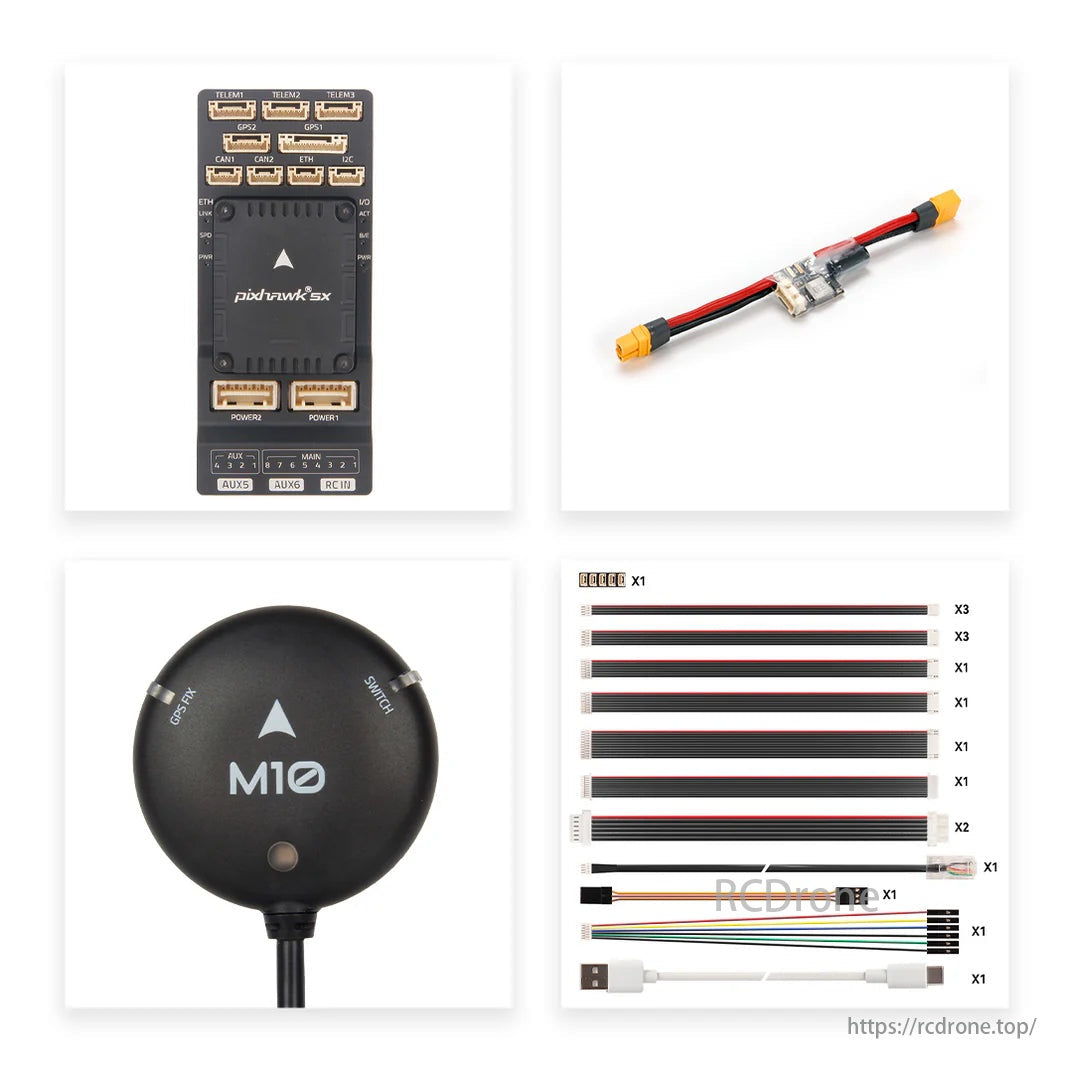
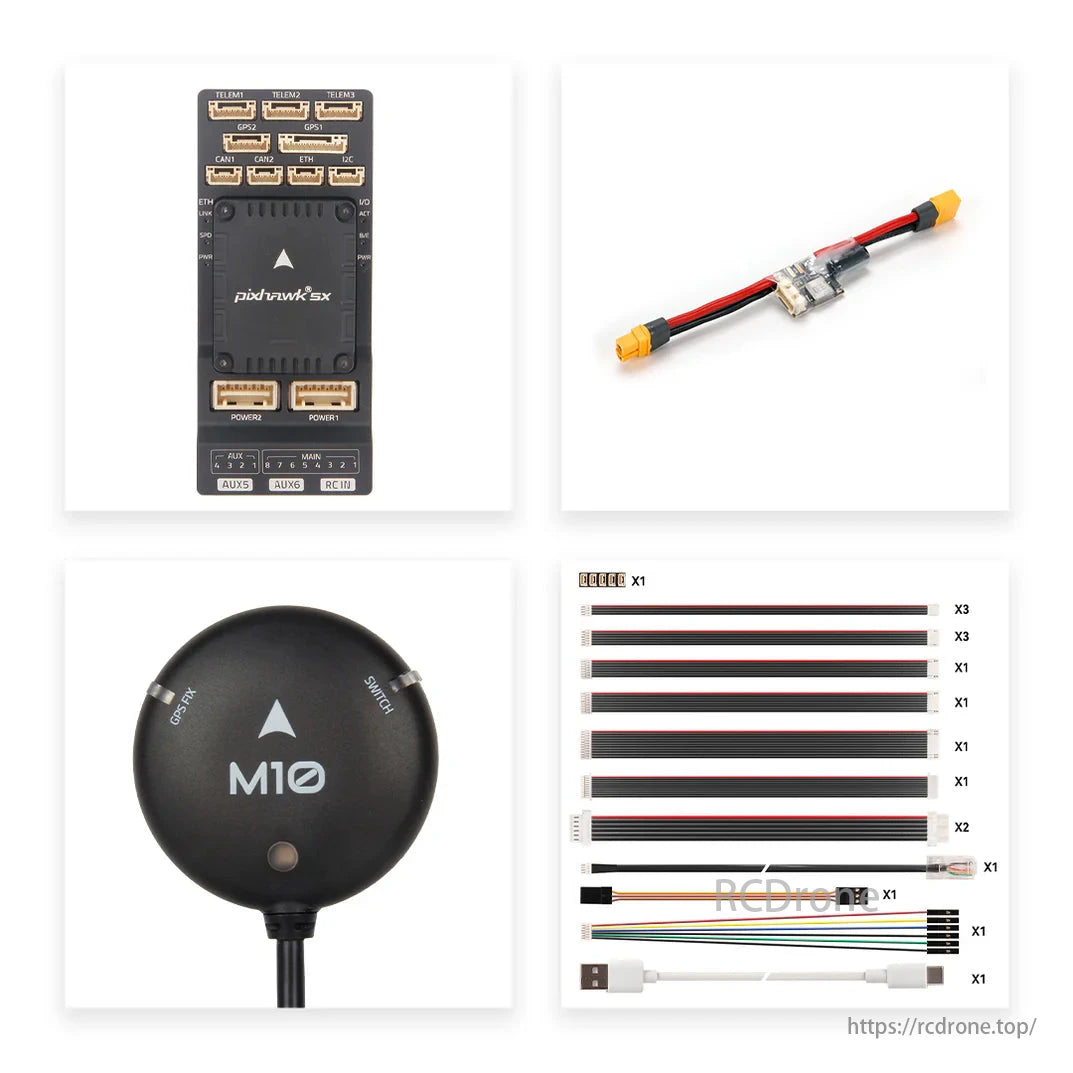
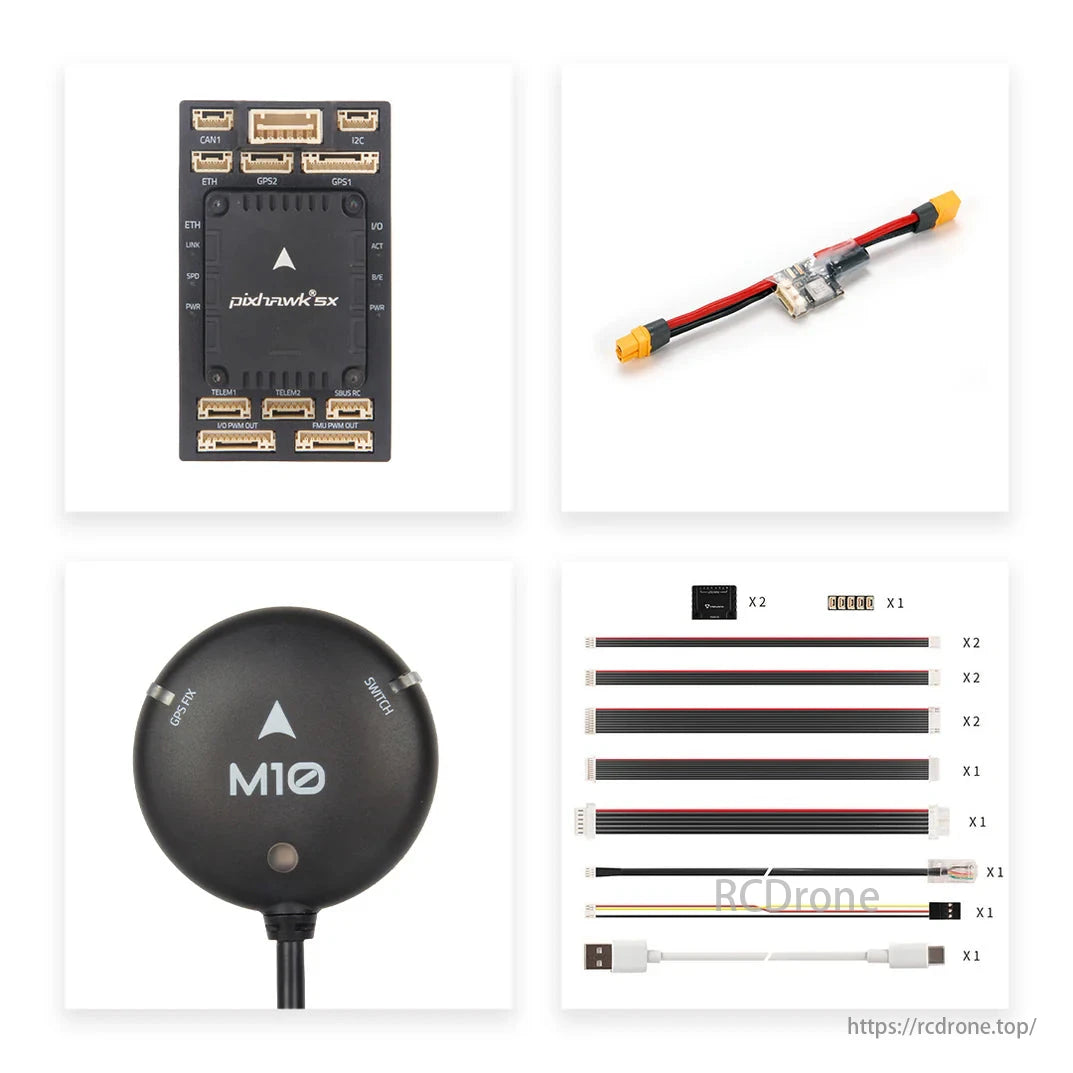
Contrôleur de vol Pixhawk 5X, module GPS M10, module d'alimentation et divers câbles pour l'assemblage du drone.
Related Collections