Contrôleur de vol de pilote automatique Holybro Pixhawk 6X Pro
Contrôleur de vol de pilote automatique Holybro Pixhawk 6X Pro
HolyBro
Impossible de charger la disponibilité du service de retrait
Point clé de la conception
- IMU industriel ADIS16470 hautes performances avec plage dynamique d'accéléromètre élevée (±40 g), parfait pour Détection précise des mouvements dans les applications exigeantes des drones
- Tout nouveau matériau d'isolation des vibrations durable et avancé avec une fréquence de résonance dans le spectre le plus élevé, idéal pour les applications de drones industriels et commerciaux
- IMU triple redondant et baromètre double redondant sur des bus séparés
- Processeur STM32H753 hautes performances
- Contrôleur de vol modulaire : IMU, FMU et système de base séparés
- La conception axée sur la sécurité intègre des capteurs de différents fabricants et gammes de modèles
- Un LDO indépendant alimente chaque capteur avec un contrôle de puissance indépendant.
- Interface Ethernet pour l'intégration d'ordinateurs de mission à haut débit. L'absence de transformateur peut être obtenue en utilisant des résistances de terminaison de 50 Ohm au niveau du dispositif cible (AN2190 Terminaison 50 Ohm).
- Carte IMU à température contrôlée, permettant une température de fonctionnement optimale des IMU
- Mode de signal commutable en 3,3 V ou 5 V (nécessite une modification de la carte de base)
Note:
- Un module FC + une carte de base sont nécessaires pour que ce produit fonctionne. Un module FC ou une carte de base seul ne fonctionnera pas.
Spécification
Processeurs et capteurs
- Processeur FMU : STM32H753
- Arm® Cortex®-M7 32 bits, 480 MHz, 2 Mo de mémoire flash, 1 Mo de RAM
- Processeur d'E/S : STM32F103
- Arm® Cortex®-M3 32 bits, 72 MHz, 64 Ko de SRAM
- Capteurs embarqués
- Accélérateur/Gyro : ADIS16470
- ±40g, Isolation des vibrations, IMU industriel
- Accélérateur/Gyro : IIM-42652
- ±16g, Isolation des vibrations, IMU industriel
- Accélérateur/Gyro : ICM-45686 avec technologie BalancedGyro™
- ±32g, monté en dur
- Baromètre : ICP20100
- Baromètre : BMP388
- Mag: BMM150
- Accélérateur/Gyro : ADIS16470
- NXP Élément matériel sécurisé EdgeLock SE050 Plug & Trust
Données électriques
- Tension nominale :
- Tension d'entrée maximale : 6 V
- Entrée d'alimentation USB : 4,75~5,25 V
- Entrée du rail servo : 0~36 V
- Cotes actuelles :
- Limiteur de courant de sortie Telem1 : 1,5 A
- Limiteur de courant de sortie combiné de tous les autres ports : 1,5 A
- Température de fonctionnement : -25-85°C
Données mécaniques
- Dimensions
- Module de contrôleur de vol : 38,8 x 31,8 x 30,1 mm
- Plinthe standard : 52,4 x 102 x 16,7 mm (Aluminium)
- Mini plinthe : 43,4 x 72,8 x 14,2 mm
- Poids
- Module de contrôleur de vol : 50 g
- Plinthe standard : 72,5 g (Aluminium)
- Mini plinthe : 26.5g
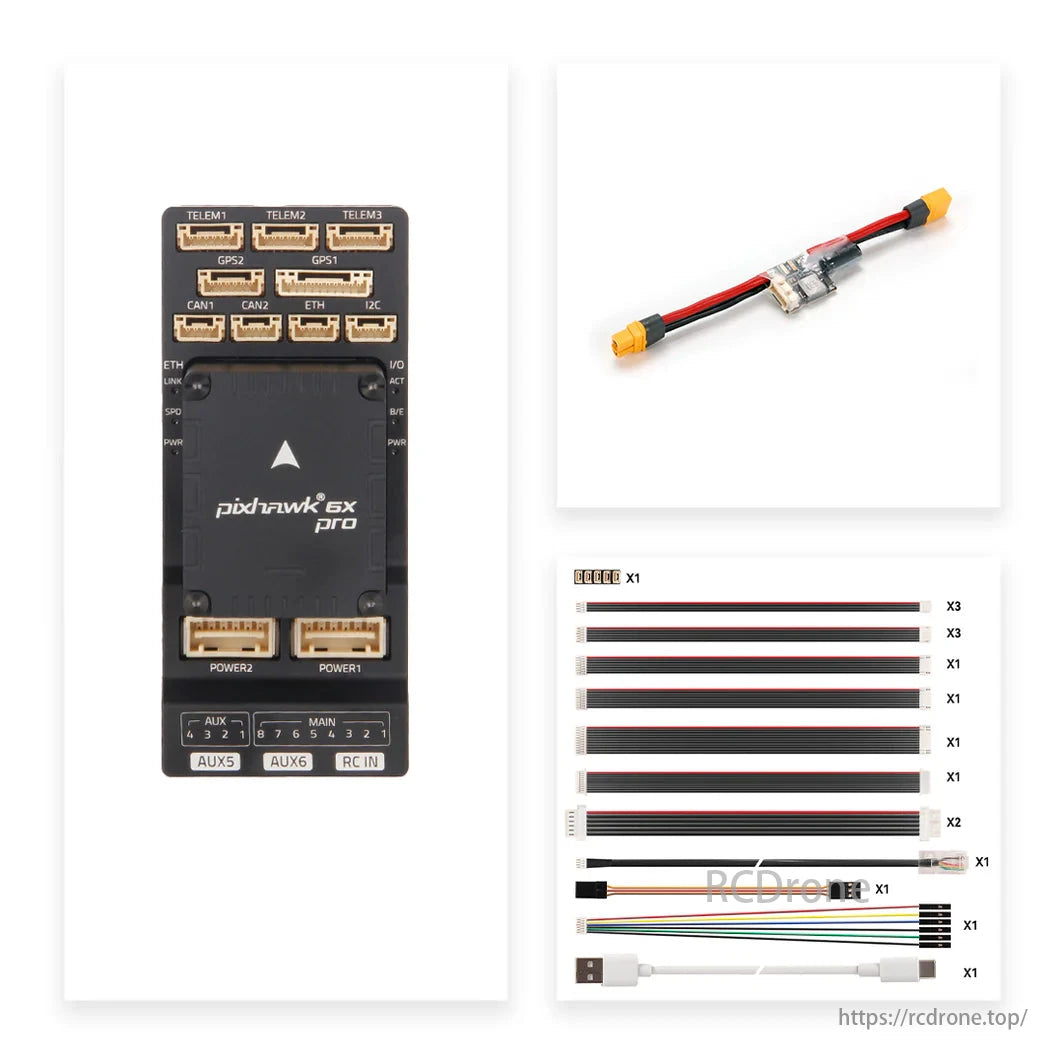
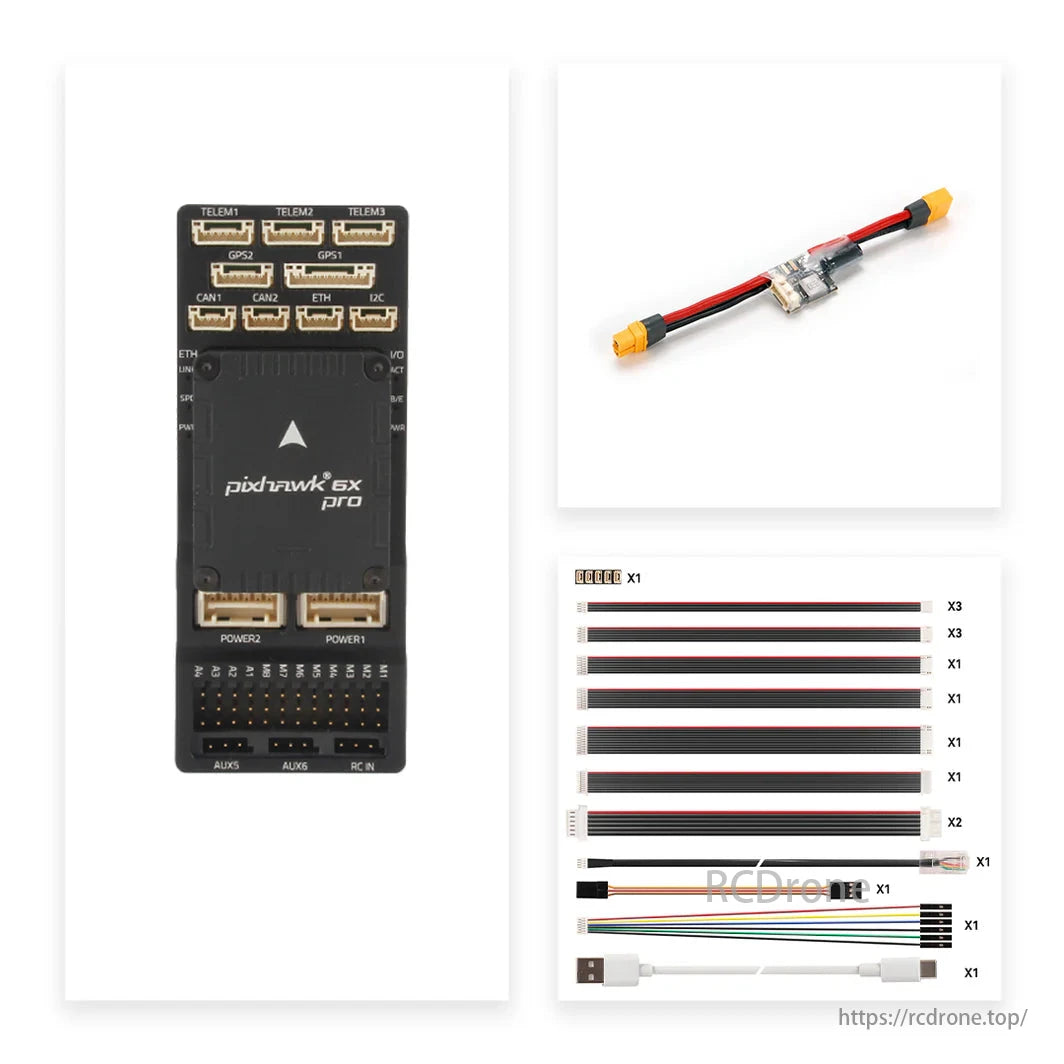
Le forfait comprend
Le module FC comprend uniquement :
- Pixhawk Module de contrôleur de vol 6X Pro
- Remplacement optionnel de l'amortissement IMU (plus souple que celui préinstallé)
L'ensemble standard V2A/V2B/Mini comprend :
- Module de contrôleur de vol Pixhawk 6X Pro
- Plinthe standard Pixhawk v2A/ Plinthe standard Pixhawk v2B/ Mini plinthe
- Module d'alimentation haute tension PM02D
- Jeu de câbles
Détails
Toute nouvelle conception d'isolation des vibrations
Cette nouvelle conception d'isolation des vibrations utilise le courant alternatifmatériau isolant à base de silicone durable formulé sur mesure à la place de la conception traditionnelle en mousse. BBénéficiant d'une R&D et de tests approfondis, il offre des caractéristiques d'amortissement IMU optimales avec une fréquence de résonance dans le spectre le plus élevé, parfaite pour les drones industriels et commerciaux
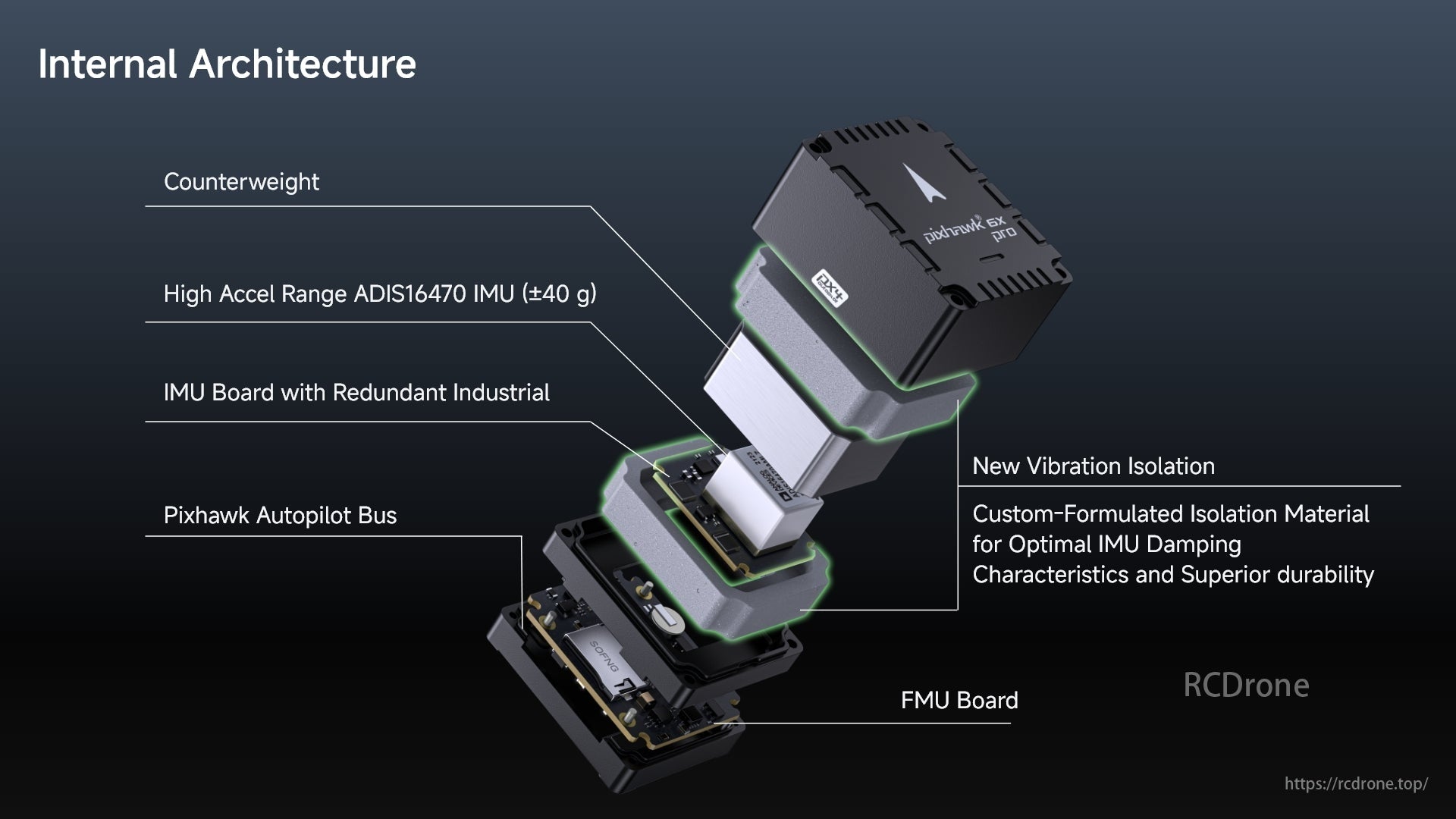
Architecture interne : contrepoids, IMU ADIS16470 à plage d'accélération élevée (±40 g), carte IMU industrielle redondante, bus de pilote automatique Pixhawk, nouvelle isolation antivibratoire, carte FMU.
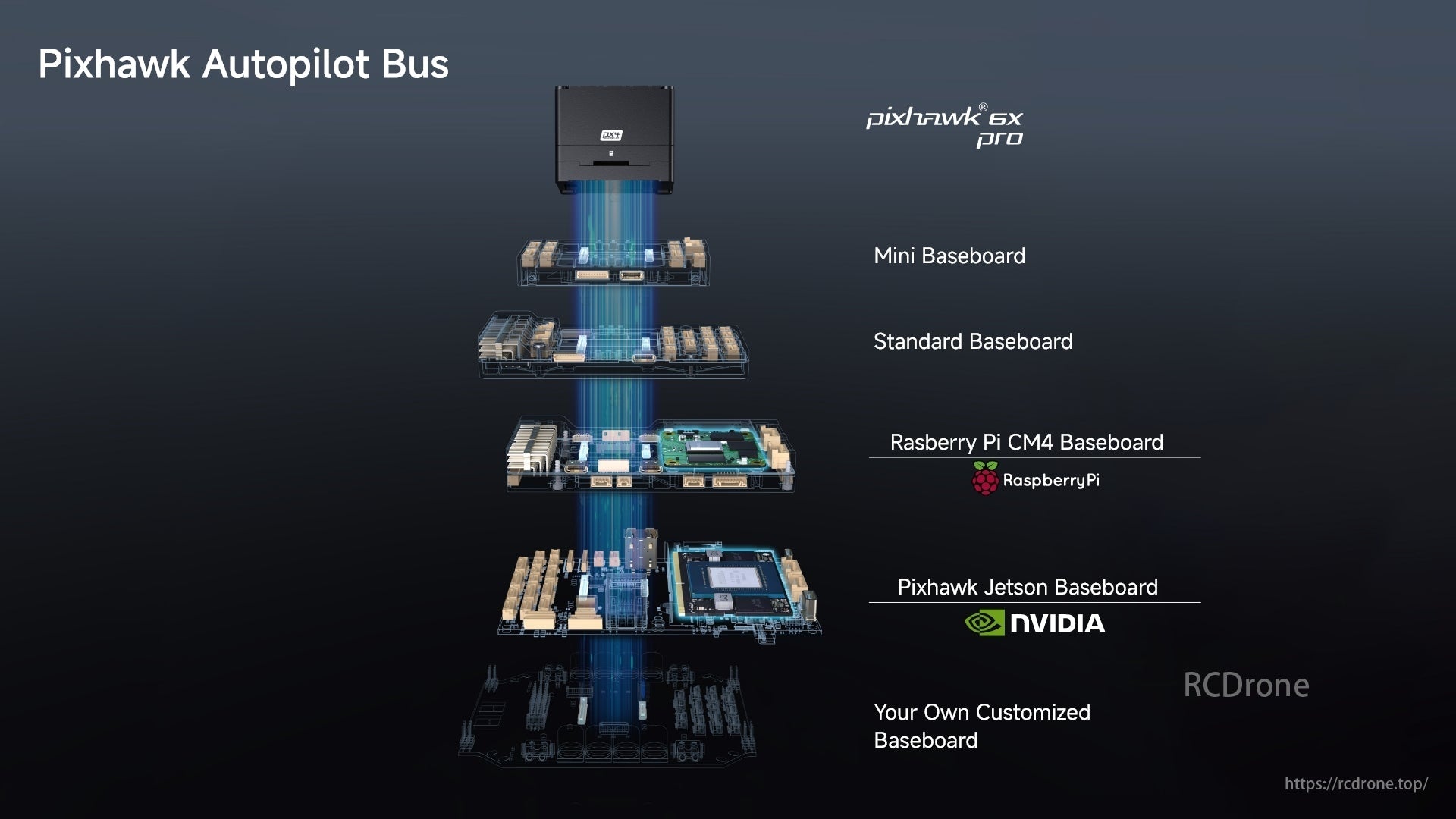
Le bus de pilote automatique Pixhawk connecte les cartes mères Mini, Standard, Raspberry Pi CM4, Jetson et personnalisées.
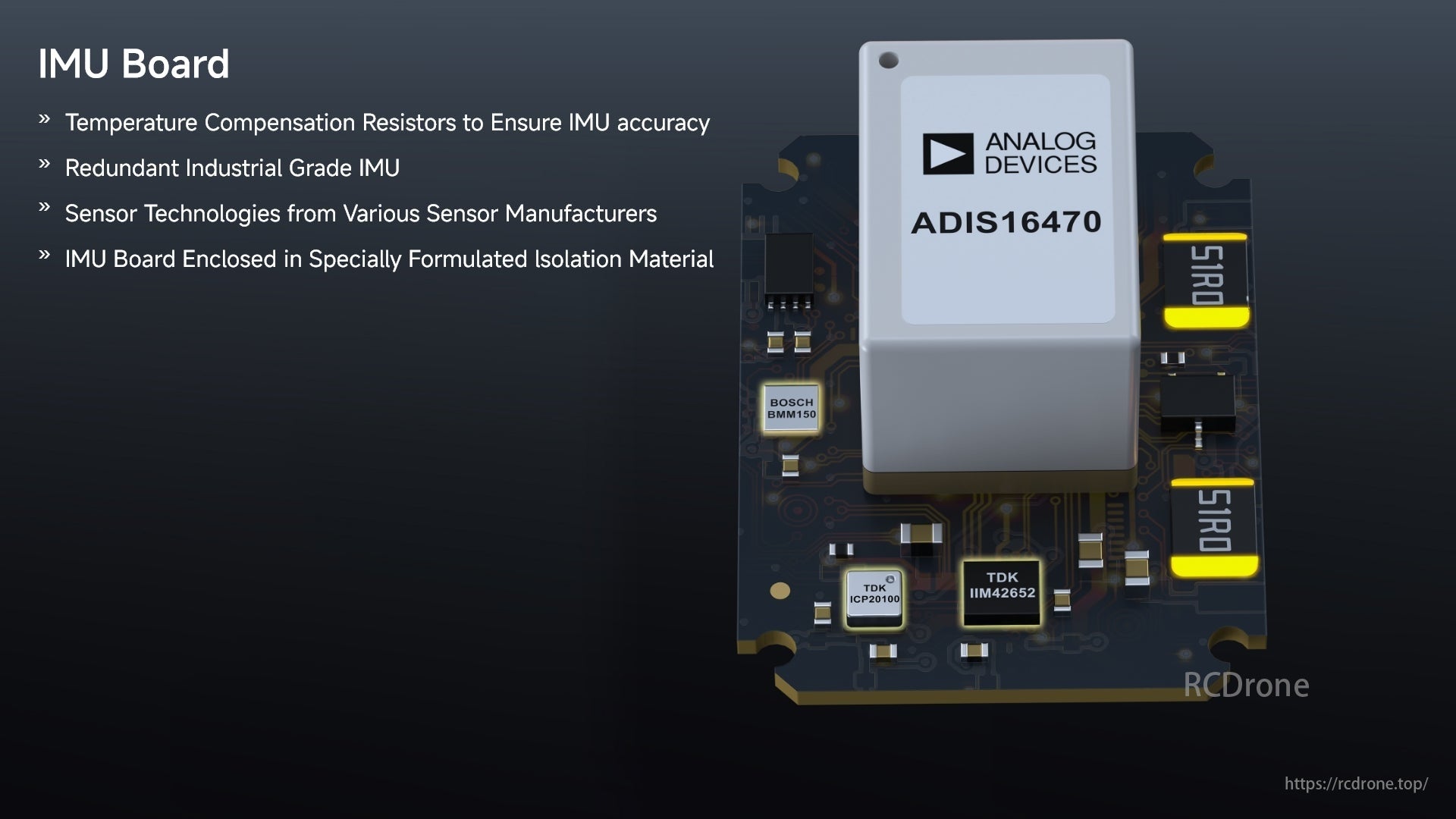
La carte IMU comprend des résistances de compensation de température, une IMU redondante de qualité industrielle, des capteurs de divers fabricants et est enfermée dans un matériau isolant.
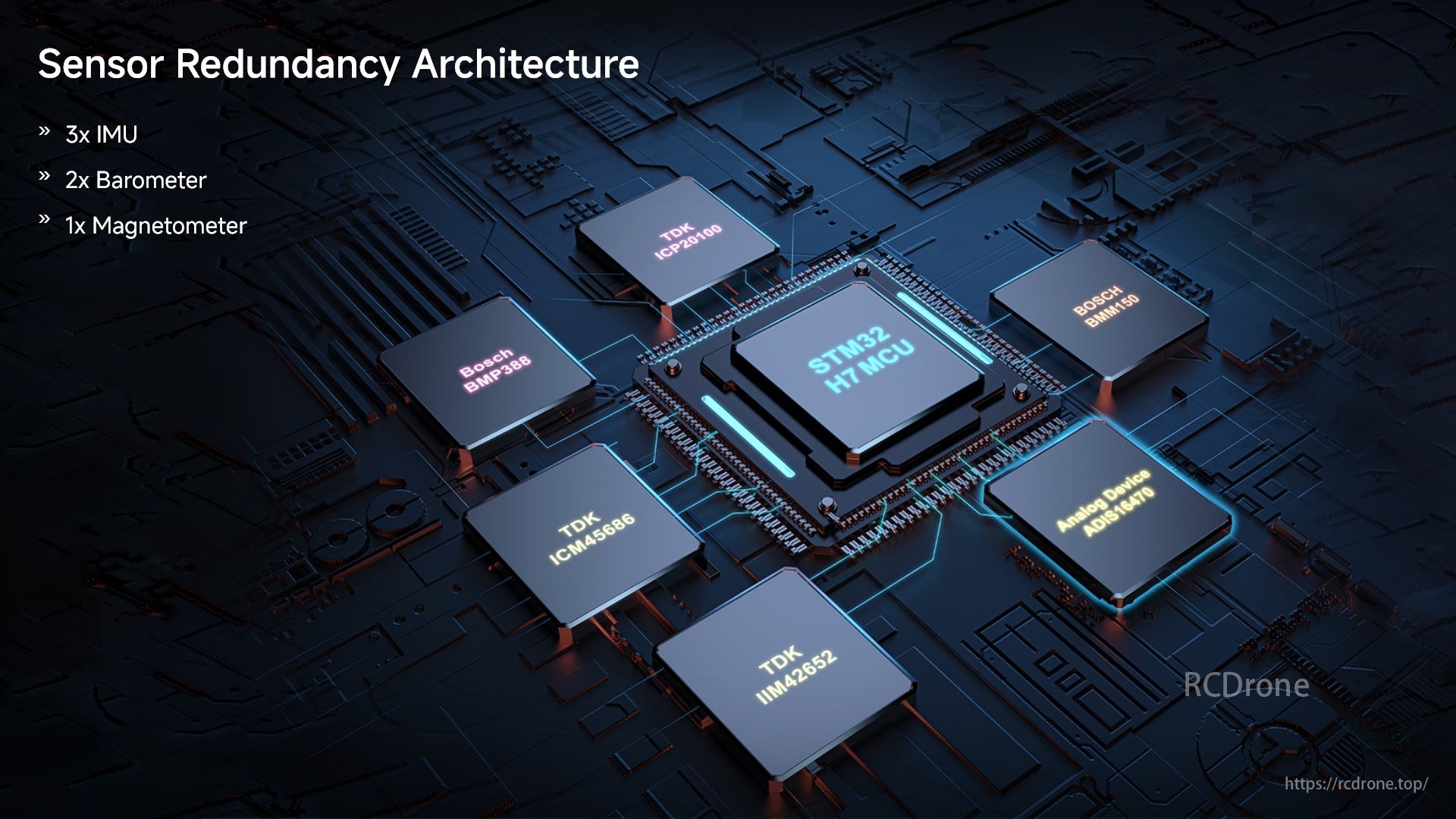
L'architecture de redondance des capteurs comprend 3 IMU, 2 baromètres et 1 magnétomètre, avec des composants tels que le microcontrôleur STM32 H7, les circuits intégrés TDK, le Bosch BMP388 et l'Analog Devices ADIS16470.
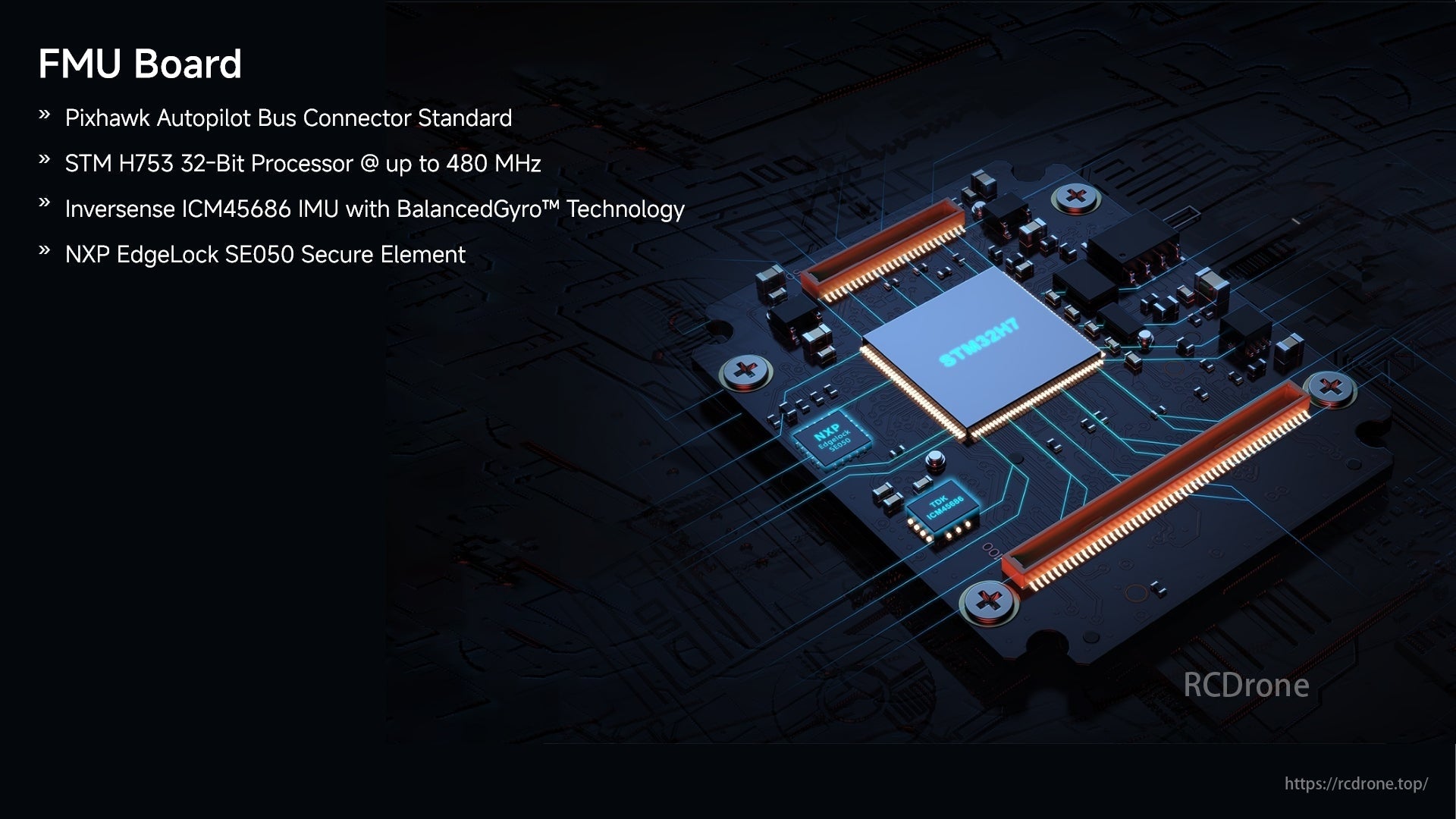
La carte FMU comprend un connecteur de bus de pilote automatique Pixhawk standard, un processeur STM H753 32 bits jusqu'à 480 MHz, un IMU Inversense ICM45686 avec technologie BalancedGyro et un élément sécurisé NXP EdgeLock SE050.
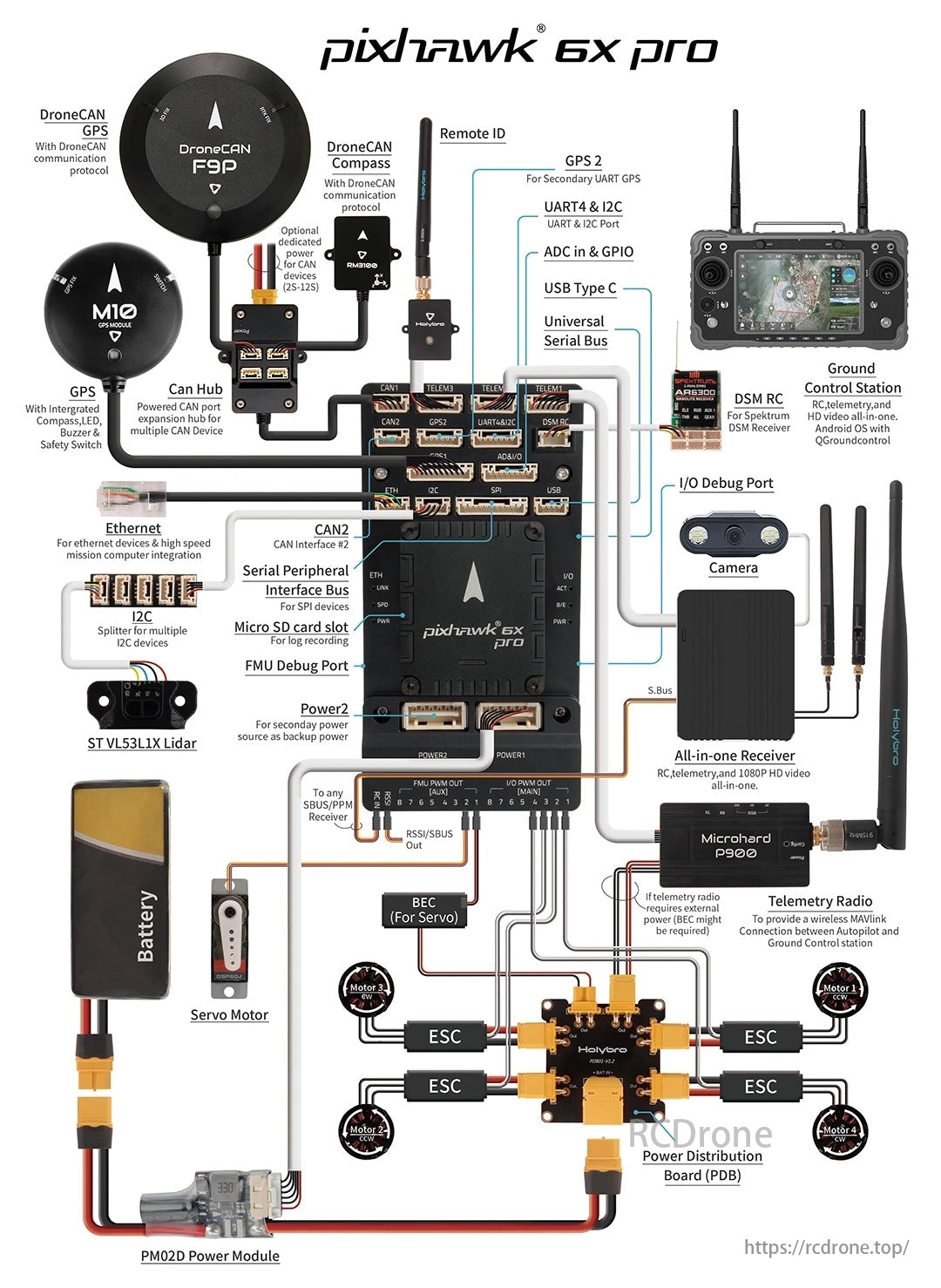
Le schéma du Pixhawk 6X Pro illustre les connexions du système de pilotage automatique d'un drone, notamment les modules GPS, la boussole, la station de contrôle au sol, la caméra, la radio de télémétrie, les ESC, les moteurs et la carte de distribution d'alimentation. Diverses interfaces telles que CAN, I2C, UART et USB sont utilisées pour la communication entre les composants.
Related Collections