









RadioMaster NEXUS-XR Contrôleur de vol pour hélicoptère avec récepteur ExpressLRS 2,4GHz (Double SX1281), 256Mo
RadioMaster NEXUS-XR Contrôleur de vol pour hélicoptère avec récepteur ExpressLRS 2,4GHz (Double SX1281), 256Mo
RadioMaster
Impossible de charger la disponibilité du service de retrait
Aperçu
Le RadioMaster NEXUS-XR est un contrôleur de vol pour hélicoptère qui intègre un récepteur ExpressLRS 2.4GHz (double SX1281) pour simplifier l'installation et réduire le besoin d'un récepteur externe. Il est construit autour d'un MCU STM32F722 avec un capteur de mouvement MEMS 6 axes ICM42688P, comprend 256 Mo de mémoire flash embarquée pour l'enregistrement blackbox, et utilise un boîtier en aluminium CNC pour la protection et le refroidissement.
Le récepteur intégré est un récepteur mini true diversity RP4TD-M ExpressLRS 2.4GHz avec deux antennes filaires de 65 mm 2.4GHz, interface de bus CRSF, mises à jour WiFi, et un taux de rafraîchissement maximum de 500Hz / F1000Hz.
Caractéristiques clés
- Récepteur ExpressLRS 2.4GHz intégré : Conception de récepteur double Semtech SX1281 (Gemini) ; récepteur interne répertorié comme récepteur mini true diversity RP4TD-M ExpressLRS 2.4GHz.
- Plateforme de contrôleur de vol : MCU STM32F722RET6 + ICM42688P 6 axes MEMS ; baromètre SPL06-001.
- Journalisation de boîte noire intégrée : 256 Mo de mémoire flash embarquée ( W25N02KVZEIR).
- Support de servo : Sorties de servo S1, S2, S3 et TAIL (jusqu'à 12V) ; prend en charge les servos de 760us et 1520us ; compatible avec les moteurs de queue.
- Flexibilité de puissance et de tension : Alimentation en tension (DC) 5 - 16V ; entrée de tension EXT (télé) 3.6-70V ; sortie d'alimentation du port série A/B/C 5V - 1.5A ; rails isolés listés comme 1.8V, 3.3V (MCU) et 5V (interfaces).
- Connectivité : 5 UARTs ( S.BUS[UART1], TELEM[UART2], PORT-A[UART4], PORT-B[UART6], PORT-C[UART3]) ; entrée de capteur RPM à partir du capteur de fréquence ESC ; AUX x1.
- Boîtier et accès : Boîtier en aluminium usiné CNC ; accès USB-C pris en charge via le câble d'extension USB-C/Type-C inclus.
- Fonctionnalité de sécurité : Sauvetage RF répertorié comme fonctionnalité standard.
- Couleurs de boîtier optionnelles : Gris / Or / Rouge / Bleu / Violet.
Pour des vérifications de compatibilité avant achat, des questions sur le câblage ou un support pour la configuration, contactez [email protected] or visitez https://rcdrone.top/ .
Spécifications
| Article | Système de contrôle NEXUS-XR |
| Firmware | RF 2.2 |
| MCU (Contrôleur de vol) | STM32F722RET6 |
| Capteur de mouvement | ICM42688P MEMS 6 axes |
| Baromètre | SPL06-001 |
| Mémoire Flash (IC de boîte noire) | 256 Mo (W25N02KVZEIR) |
| UART | 5 - S.BUS[UART1], TELEM[UART2], PORT-A[UART4], PORT-B[UART6], PORT-C[UART3] |
| Sorties de servo | S1, S2, S3, servos de queue (jusqu'à 12V); prend en charge les servos de 760us et 1520us |
| Capteur de RPM | 1 - à partir du capteur de fréquence ESC |
| AUX | 1 |
| Entrée de tension EXT (télé) | 3.6-70V |
| Alimentation en tension (DC) | 5 - 16V |
| Sortie d'alimentation du port série A/B/C | 5V - 1.5A |
| Support du récepteur | CRSF, ELRS, GHOST, S.BUS, SUMD, IBUS, XBUS, EXBUS, PPM, MSP |
| Télémetrie | S.BUS, HoTT, S.Port, MSP, EDGETX, ELRS |
| Récepteur interne | RP4TD-M ExpressLRS 2.4GHz Mini Récepteur True Diversity |
| MCU (Récepteur) | ESP32 |
| Type | ISM |
| Chip RF | SX1281 x 2 |
| Antenne | Antennes filaires 2.4GHz de 65 mm x 2 |
| Plage de fréquence | 2.4GHz |
| Taux de rafraîchissement maximum | 500Hz / F1000Hz |
| Puissance RF de télémétrie | Max 2 x 10mW |
| Mises à jour WiFi | Oui |
| Cible FW | RadioMaster RP4TD-M 2400 RX |
| Interface de bus | CRSF |
| Dimensions | 44.70 x 26.50 x 14.30mm |
| Poids | 24.1g |
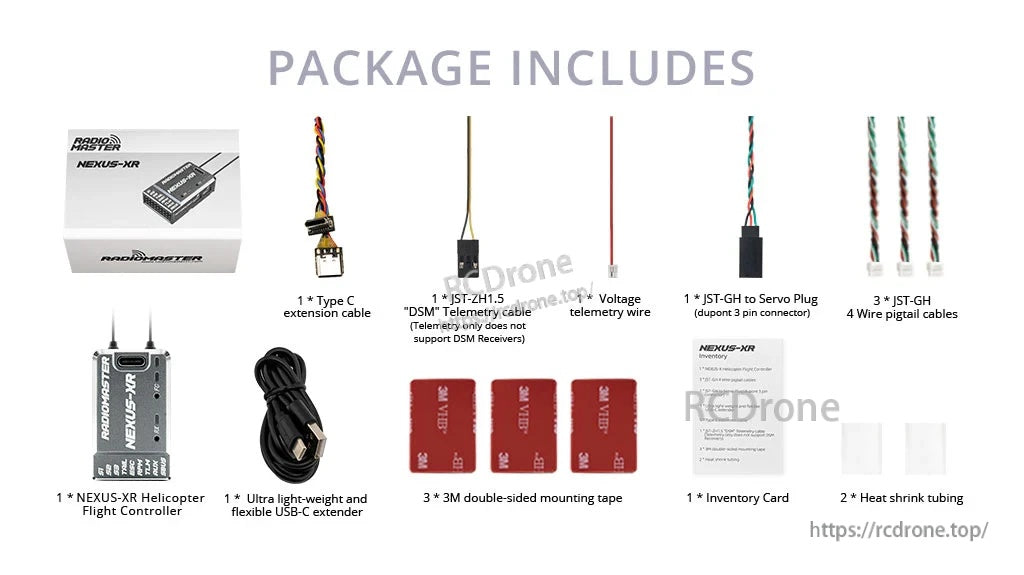
Ce qui est inclus
- 1 * Système de contrôle NEXUS-XR
- 3 * Câbles pigtail 4 fils JST-GH
- 1 * Prise JST-GH à prise servo (connecteur dupont 3 broches)
- 1 * Extenseur USB-C ultra léger et flexible
- 1 * Câble d'extension Type C
- 1 * JST-ZH1.5 câble de télémétrie “DSM” (télémétrie uniquement ; ne prend pas en charge les récepteurs DSM)
- 1 * Fil de télémétrie de tension
- 3 * Ruban adhésif double face 3M
- 2 * Tubes thermorétractables
- 1 * Carte d'inventaire
Applications
- Assemblages d'hélicoptères nécessitant un récepteur ExpressLRS 2.4GHz intégré (interface de bus CRSF)
- Configurations d'hélicoptères nécessitant un enregistrement de boîte noire embarquée (256 Mo) pour le réglage
- Installations nécessitant des sorties de servo jusqu'à 12V et un support pour servos 760us / 1520us
Produits connexes
- Système de contrôle NEXUS
- Système de contrôle NEXUS-X
Détails

Le NEXUS-XR combine un contrôleur de vol d'hélicoptère et un récepteur ExpressLRS 2.4GHz dans un boîtier compact en aluminium CNC.

Le matériel Dual SX1281 (Gemini) ExpressLRS est intégré pour réduire le câblage et éliminer le besoin d'un récepteur externe dans de nombreuses constructions.
Un MCU STM32F722 associé à un capteur MEMS 6 axes ICM42688P fournit le traitement et la détection de mouvement nécessaires pour un contrôle stable des hélicoptères.

256 Mo de mémoire flash intégrée prend en charge l'enregistrement blackbox pour le réglage et le dépannage.

Un boîtier en aluminium usiné CNC robuste aide à protéger l'électronique et à améliorer le refroidissement, avec un accès USB-C facile pour la configuration.
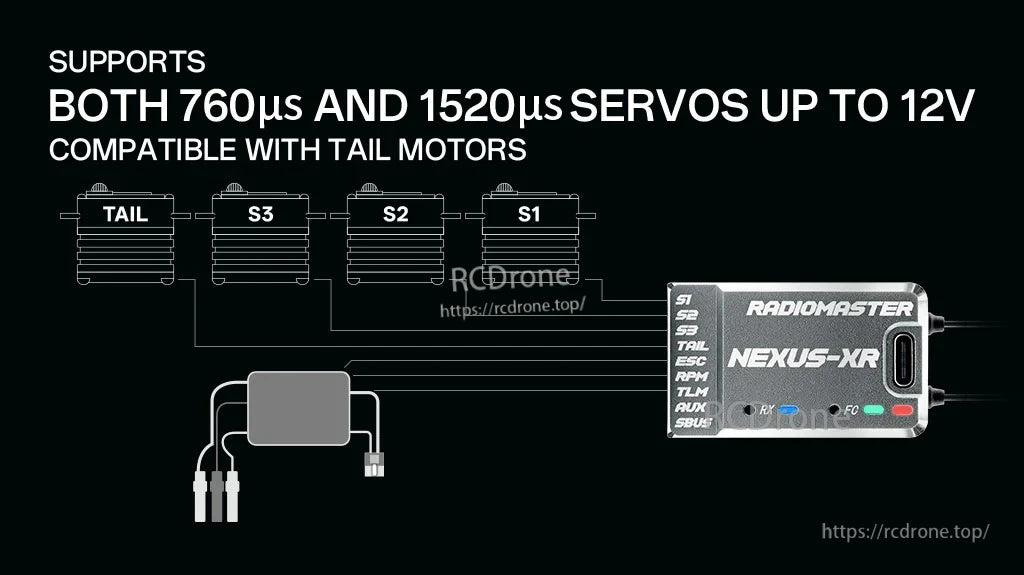
Les sorties de servo prennent en charge à la fois les servos de 760µs et de 1520µs jusqu'à 12V, avec compatibilité pour les configurations de moteur de queue.
Évitez la chasse aux pièces : la boîte comprend un prolongateur USB-C, des fils de câblage, du ruban de montage et de la gaine thermorétractable pour accélérer l'installation.

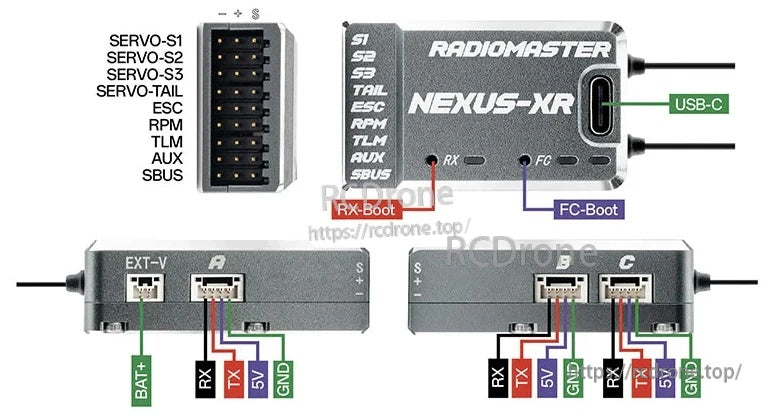
Un étiquetage clair des ports aide à un câblage propre pour les servos, l'alimentation, la télémétrie et les accessoires UART.

Related Collections












