






Contrôleur de vol Rotorflight HELI405 RF pour hélicos FBL, gyroscope basé sur Betaflight, prise en charge PPM/Spektrum/FrSky, ESC DShot
Contrôleur de vol Rotorflight HELI405 RF pour hélicos FBL, gyroscope basé sur Betaflight, prise en charge PPM/Spektrum/FrSky, ESC DShot
Flywing
Impossible de charger la disponibilité du service de retrait
Aperçu
Le Rotorflight HELI405 RF est un contrôleur de vol conçu pour les hélicoptères RC à rotor unique traditionnels et les systèmes FBL. Il fonctionne avec Rotorflight (basé sur Betaflight) et intègre un gyroscope ICM‑42688, un baromètre SLP‑06 et un enregistrement Flash de 16M, offrant un contrôle avancé du régulateur pour maintenir une vitesse de rotation constante, une télémétrie riche et un support pour les configurations de moteur de queue ou de servo de queue. Il prend en charge les protocoles ESC DShot, Multishot, Oneshot et PWM et fonctionne avec des récepteurs grand public, y compris PPM, Spektrum, FrSky, CRSF, XBus, ELRS, SBUS et iBus.
Les matériaux fournis montrent également un ESC 2‑en‑1 60A compatible (Li‑Po 3–6S, uniquement DShot, 7.4V 5A S‑BEC) utilisé avec ce contrôleur pour aider à maintenir une vitesse de rotation constante. L'ajustement électrique D‑shot au firmware Bluejay est pris en charge.
Caractéristiques clés
- Firmware Rotorflight (basé sur Betaflight) optimisé pour les hélicoptères ; réglable depuis l'émetteur via des scripts Lua.
- Gyroscope ICM‑42688 et baromètre SLP‑06 avec Blackbox Flash 16M pour l'enregistrement des données de vol.
- Fonctions de gouverneur pour maintenir une vitesse de tête constante ; prend en charge les protocoles ESC PWM, Oneshot, Multishot et DShot.
- Télémetrie : FrSky, HoTT, S.Port, MSP, EDGEXT\ ELRS, etc.
- Support de récepteur : PPM, Spektrum (DSM), FrSky, CSRF/CRSF, XBus, ELRS, SBUS, iBus.
- Support de moteur de queue ou de servo de queue (760us/1520us), y compris moteur de queue bidirectionnel via DShot.
- Plusieurs types de taux et configuration de courbe visuelle ; deux modes de secours par configuration Rotorflight.
- Plus d'E/S : ports UART et GPS dédiés, plus baromètre intégré. Remarque : la fonction GPS est en cours de développement (sous réserve des informations officielles de Rotorflight).
- Télémetrie/Lua sur le terrain avec OpenTX 2.3.12 ou EdgeTX 2.5.0 ou version ultérieure.
Ports et connecteurs
- Ports étiquetés : DSM, GPS, Micro USB, UART, SBUS, S1/S2/S3 (servos de plateau), TAIL, ESC, RPM, Détection de tension (5–30V).
- Définitions des fiches (selon les matériaux fournis) : fiche 3P à fil unique = signal du moteur de queue ; 3P = signal du moteur principal ; fiche 1,25 = ligne de détection de tension (sortie de tension de batterie directe). Veuillez utiliser avec précaution.
- Les moteurs principal et de queue utilisent des fiches MR30.
Option ESC compatible (selon les matériaux fournis)
- ESC 2-en-1 60A ; Li-Po 3–6S ; Seulement DShot ; 7.4V 5A S-BEC.
- Conçu pour maintenir une vitesse de tête constante ; stabilisation ESC PWM disponible via la ligne RPM.
Spécifications
| CPU | STM32F405RGT6 |
| Gyro | ICM‑42688 |
| Baro | SLP‑06 |
| Flash | 16M Flash |
| IO | UART*1, GPS*1, DSM*1, PWM*5, SBUS*1, Détection de tension*1 (5–30V), RPM*1 |
| Firmware | Rotorflight |
| Récepteur | PPM, Spektrum, FrSky, CSRF, XBus, ELRS, Sbus, ibus ... |
| Télémetrie | FrSky, HoTT, S.Port, MSP, EDGEXT\ ELRS ... |
| ESC | PWM, Oneshot, Multishot, DShot ... | html
| Mode de queue | Moteur de queue ; Servo 760us/1520us |
| Taille | 43mm*22mm*14mm |
| Poids | 17g (Enceintes incluses) |
Applications
- Hélicoptères RC à rotor unique traditionnels et constructions d'hélicoptères FBL
- Configurations de vol 3D nécessitant un régulateur, un filtrage gyroscopique avancé et de la télémétrie
- Plateformes utilisant un moteur de queue ou un contrôle de servo de queue
Détails
Système hélicoptère FBL Rotorflight HELI405. Projet d'hélicoptère open source basé sur BetaFlight. Les caractéristiques incluent un moteur de queue, un servo de queue, ELRS, ESC DShot, télémétrie, journalisation, ajustement de l'émetteur et maintenance constante de la vitesse de rotation.
Rotorflight est un logiciel de vol basé sur Betaflight pour hélicoptères RC à rotor unique, offrant un contrôle PID avancé, un régulateur de vitesse de rotor, un filtrage gyroscopique, un mélangeur personnalisé et des profils de vol. Les liens de téléchargement et les détails sont disponibles sur le wiki.
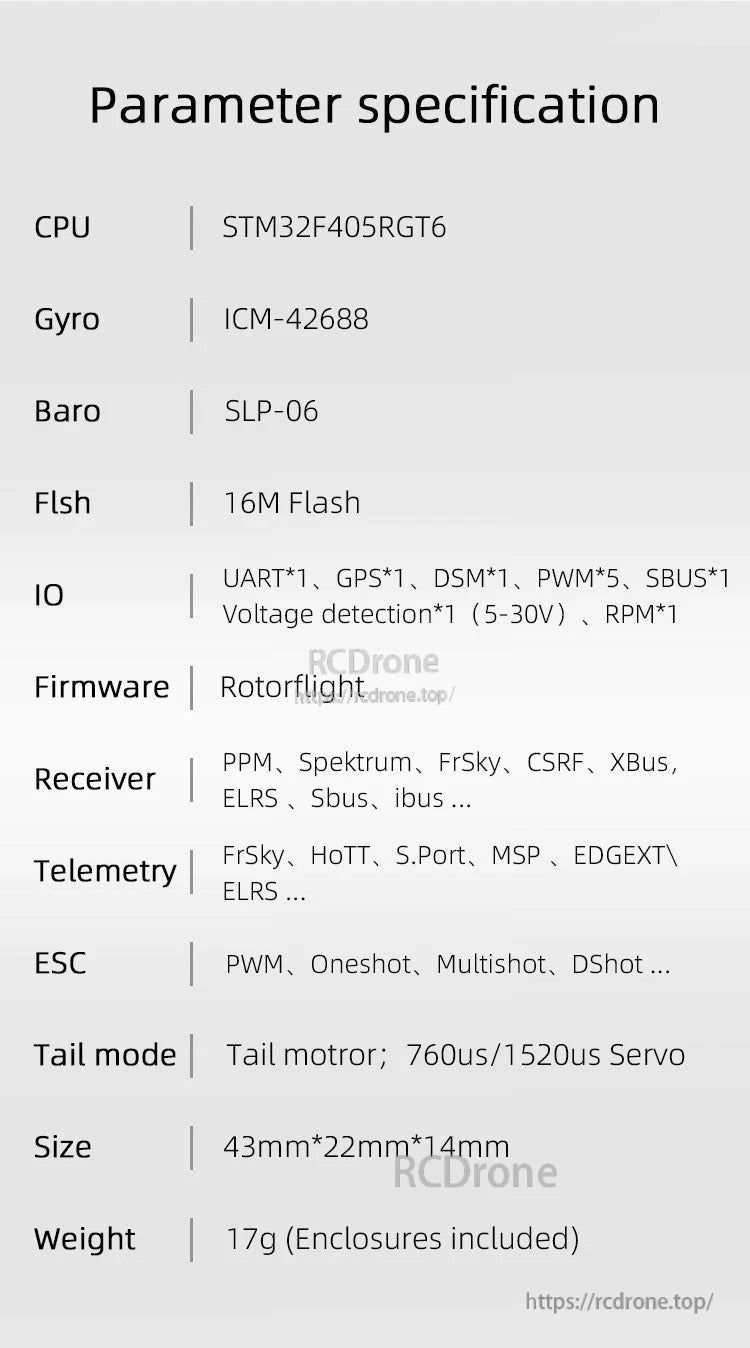
Processeur STM32F405RG, gyroscope ICM-42688, baromètre SLP-06, 16M de flash. Prend en charge plusieurs récepteurs, télémétrie, PWM vers ESC DShot, mode moteur de queue. 43x22x14mm, 17g avec enclosures.
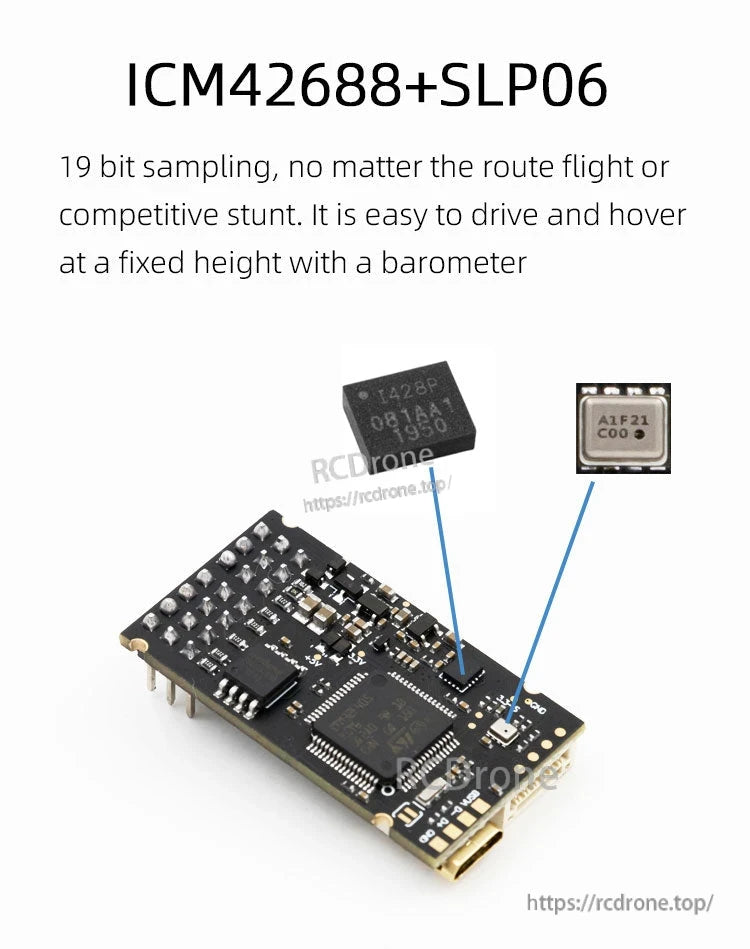
ICM42688+SLP06, échantillonnage 19 bits, contrôle de vol précis, baromètre pour un vol stationnaire stable, facile à piloter.

Le contrôleur de vol Heli405 dispose de ports UART et GPS, prend en charge le récepteur série, baromètre intégré. GPS en développement. Ports IO supplémentaires pour des mises à niveau futures. Design compact idéal pour des applications de drones avancées nécessitant une extensibilité et une intégration fiable des capteurs.

Prend en charge plusieurs récepteurs, y compris PPM, Spektrum, FrSky, CSRF, XBus, ELRS, SBUS, iBus via UART, DSM, et interfaces SBUS/PPM/iBus. Permet une transition fluide vers le projet open source Rotorflight sans remplacer la télécommande.
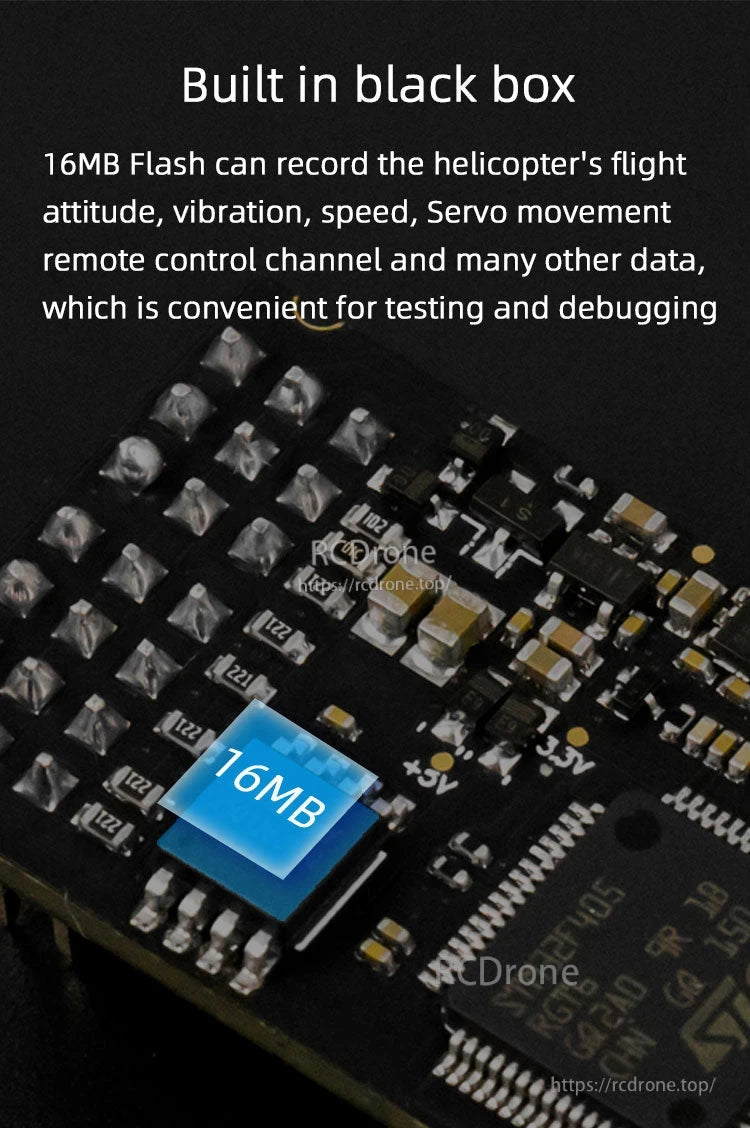
La boîte noire intégrée de 16 Mo enregistre les données de vol, y compris l'attitude, les vibrations, la vitesse, le mouvement des servos et les canaux de télécommande pour les tests et le débogage.
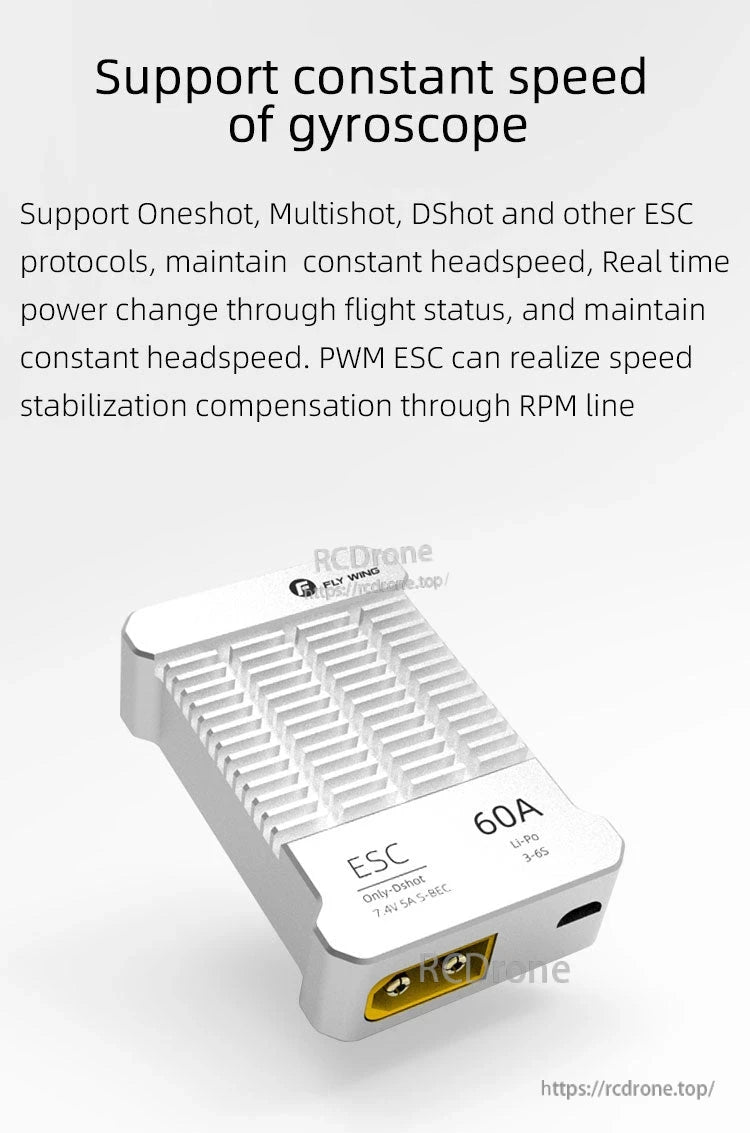
Prend en charge la vitesse gyroscopique constante, les protocoles Oneshot, Multishot, DShot. Maintient une vitesse de tête constante avec un ajustement de puissance en temps réel. L'ESC PWM permet la stabilisation de la vitesse basée sur les RPM. ESC 60A pour Li-Po 3-6S.
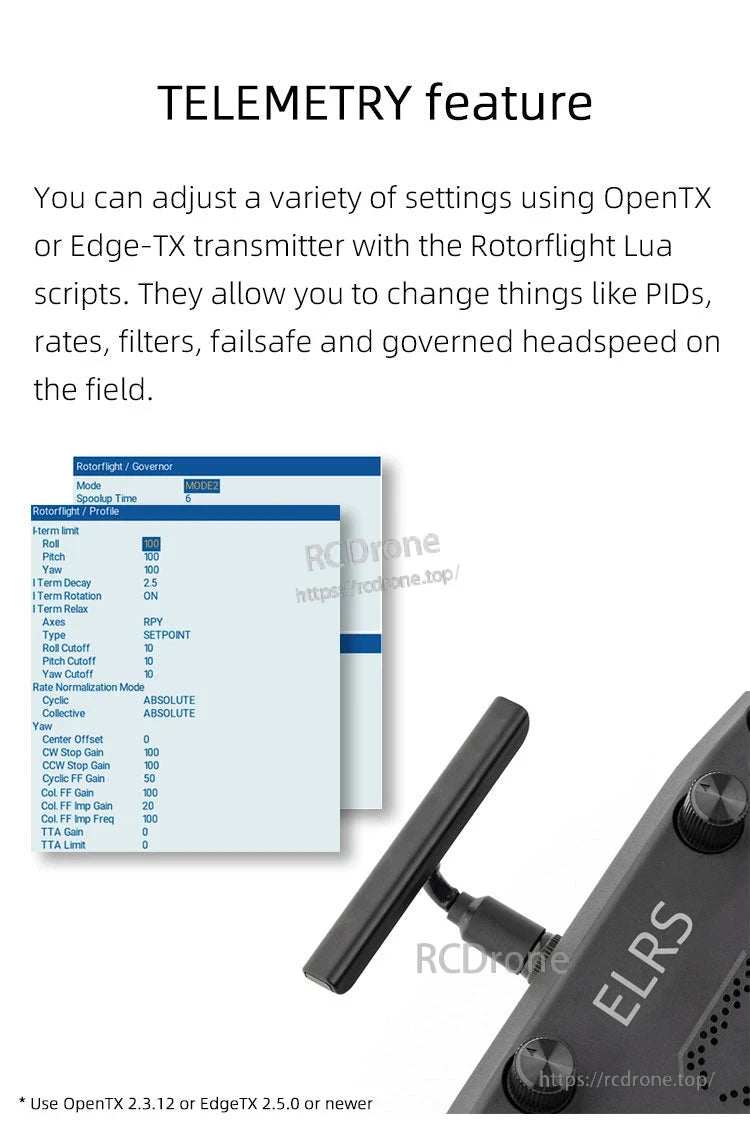
La fonction de TÉLÉMÉTRIE permet des ajustements sur le terrain via OpenTX ou Edge-TX avec des scripts Lua Rotorflight, permettant le contrôle PID, des taux, des filtres, des sécurités et de la vitesse de tête. Compatible avec OpenTX 2.3.12 ou EdgeTX 2.5.0+.
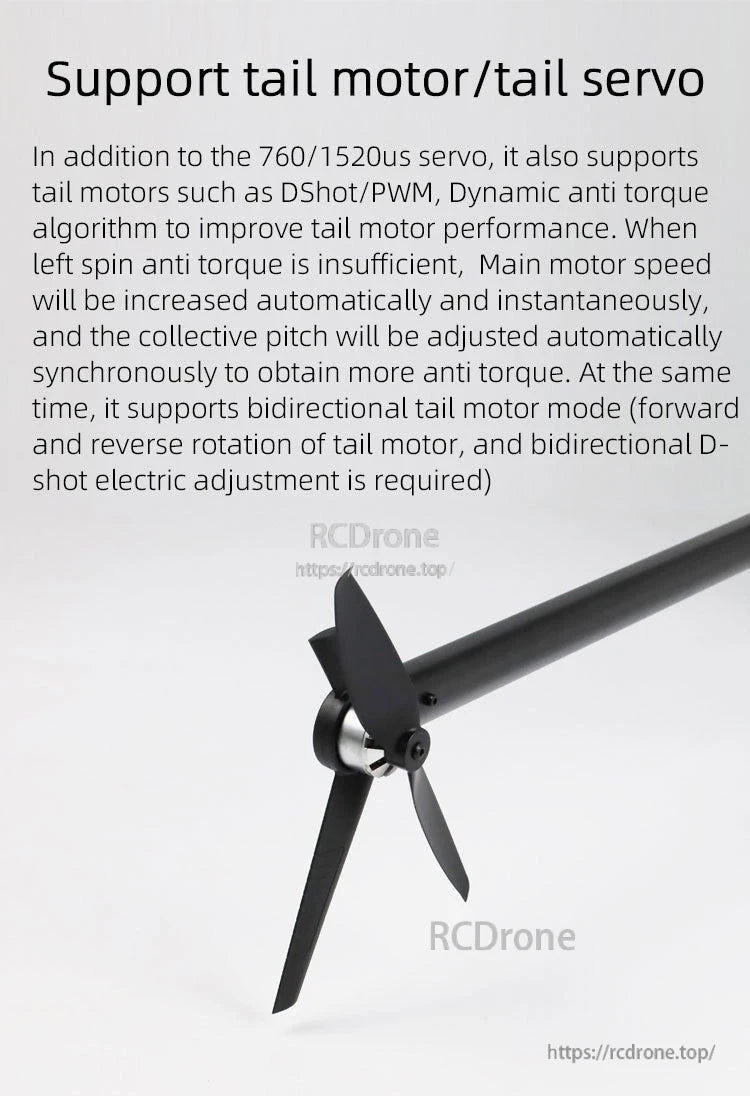
Prend en charge les systèmes de moteur de queue et de servo, y compris les servos 760/1520us et les moteurs de queue DShot/PWM. Dispose d'un algorithme dynamique anti-couple qui augmente automatiquement la vitesse du moteur principal et ajuste le pas collectif pour améliorer l'anti-couple lors d'une rotation à gauche.Permet un fonctionnement bidirectionnel du moteur de queue pour la rotation avant et arrière, nécessitant un contrôle de vitesse électronique D-shot bidirectionnel. Améliore les performances du moteur de queue et la stabilité de vol avec une logique de contrôle avancée. Conçu pour la précision et la réactivité dans des conditions de vol exigeantes, garantissant un contrôle de lacet plus fluide et une dynamique globale de l'hélicoptère améliorée. Optimisé pour les hélicoptères RC haute performance nécessitant une gestion de couple fiable et une intégration transparente avec les systèmes numériques modernes.
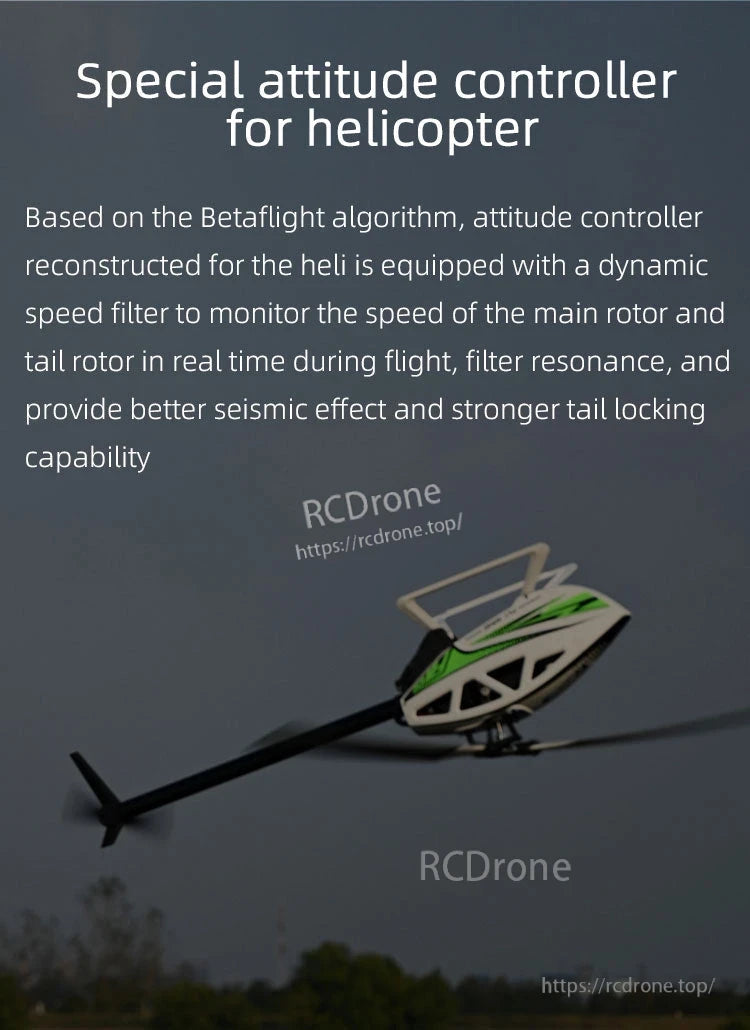
Contrôleur d'attitude spécial pour hélicoptère utilisant l'algorithme Betaflight avec filtre de vitesse dynamique pour la surveillance en temps réel des rotors, filtrage des résonances et stabilité améliorée.
Les fonctionnalités à venir incluent les données ESC Hobbywing ou K-ESC, telles que la tension, le courant et la vitesse, affichées sur l'écran du transmetteur. Le sauvetage automatique au sol doux par GPS et le retour sont également à venir bientôt.
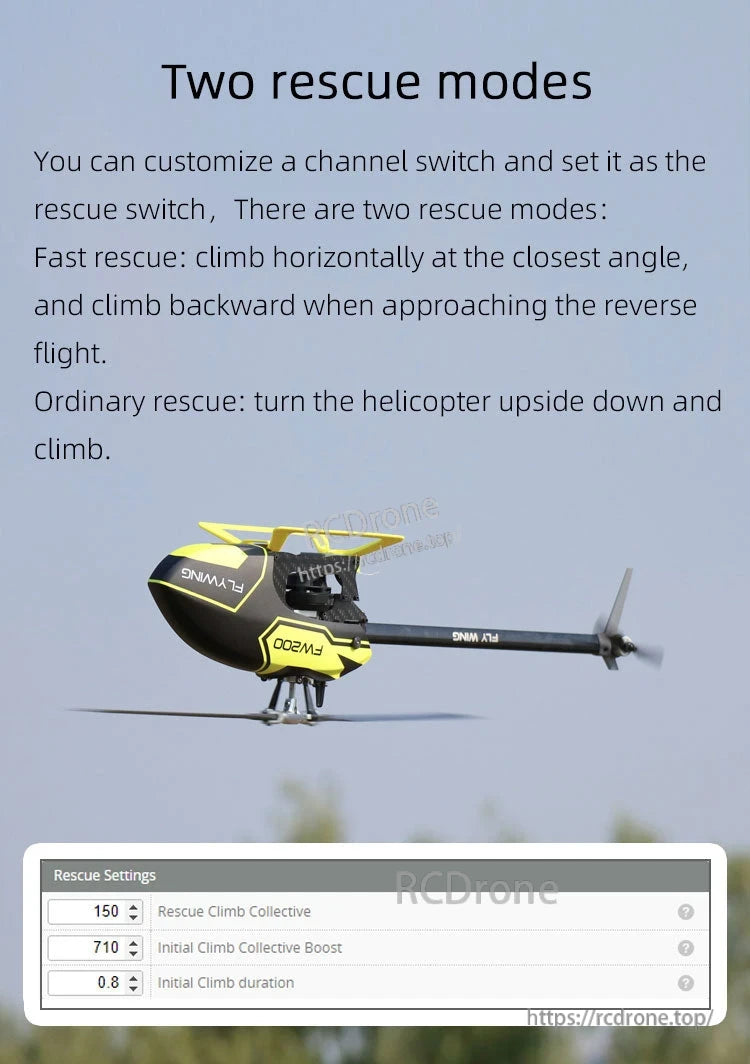
Deux modes de sauvetage : le sauvetage rapide grimpe horizontalement puis en arrière ; le sauvetage ordinaire retourne l'hélicoptère à l'envers. Commutateur de canal personnalisable. Les paramètres incluent la montée collective, le boost et la durée.
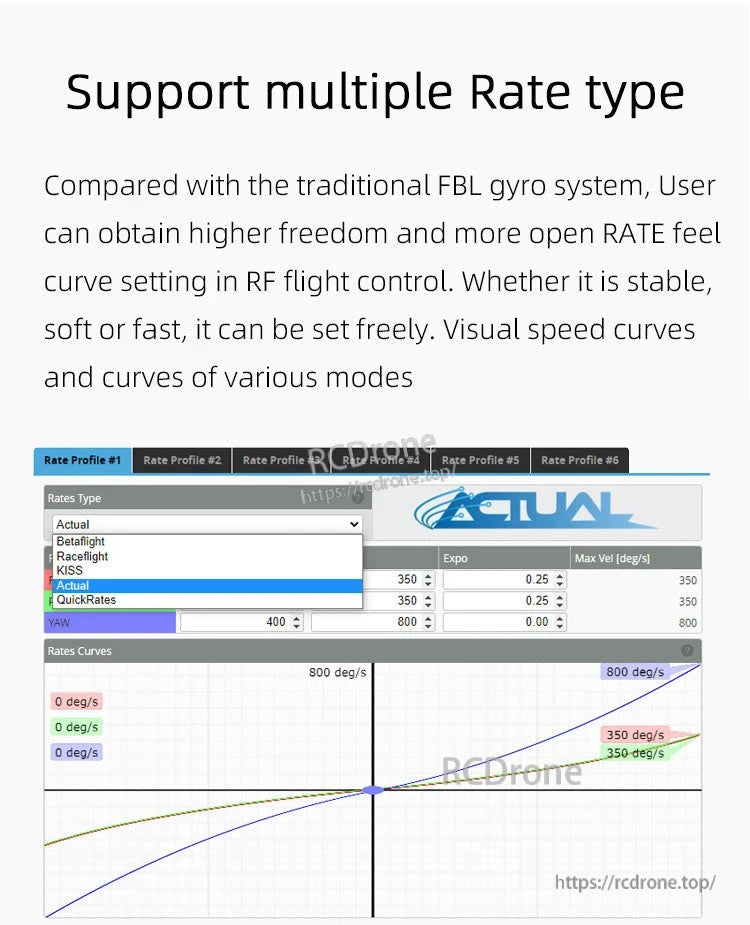
Prend en charge plusieurs types de taux, courbes de sensation de taux personnalisables, courbes de vitesse visuelles et profils de mode avec expo ajustable et vitesse maximale pour un contrôle de vol stable, doux ou rapide.
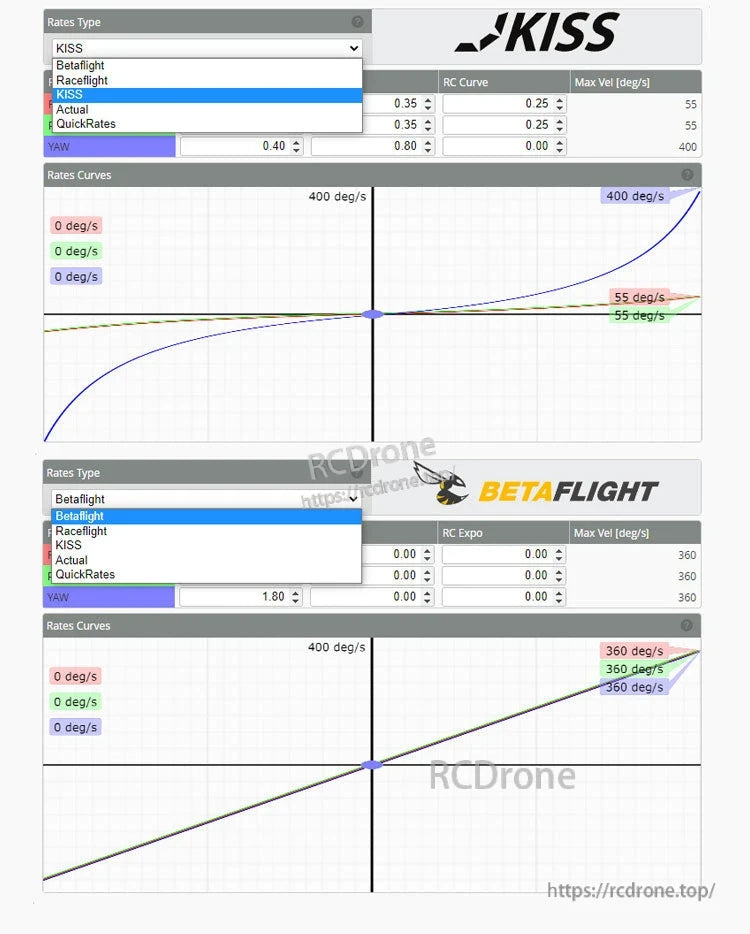
Taux de courbe RC KISS Betaflight avec vitesse maximale en degrés. Les valeurs réelles sont 0,35 et 0,25 pour des taux rapides. Les taux de lacet sont 0,40, 0,80 et 0,00. Courbes de taux à quatre canaux disponibles à 400 degrés par seconde.
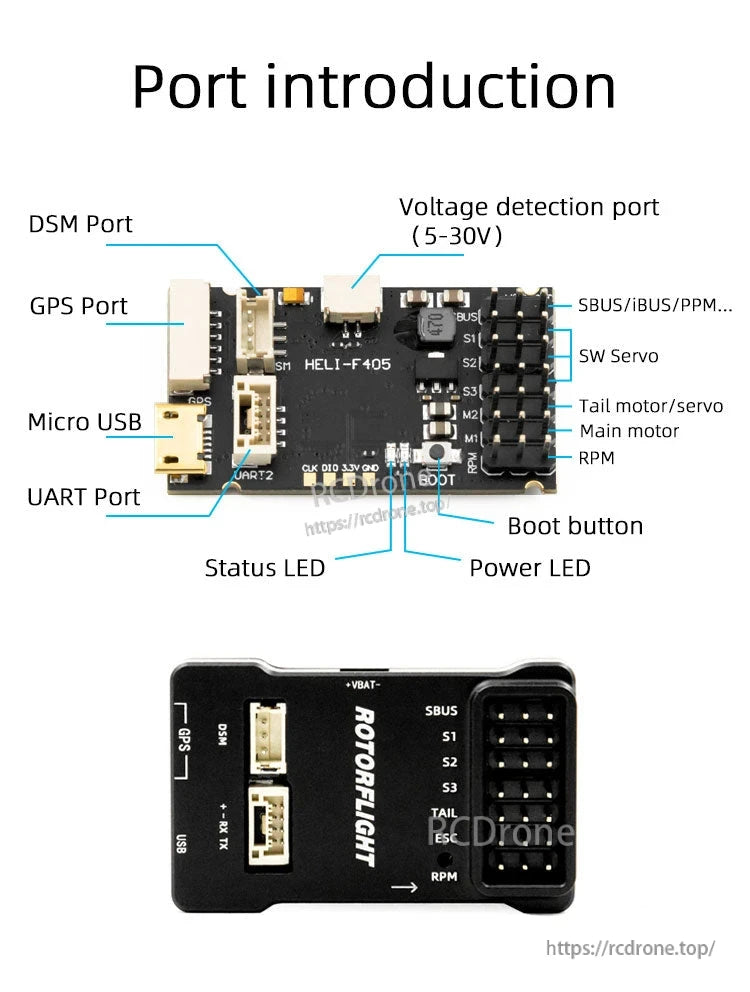
Le contrôleur de vol Rotorflight HELI-F405 prend en charge DSM, GPS, Micro USB, UART, détection de tension 5-30V, SBUS/iBUS/PPM, sorties de servo et de moteur, surveillance des RPM, bouton de démarrage et LED d'état/alimentation.
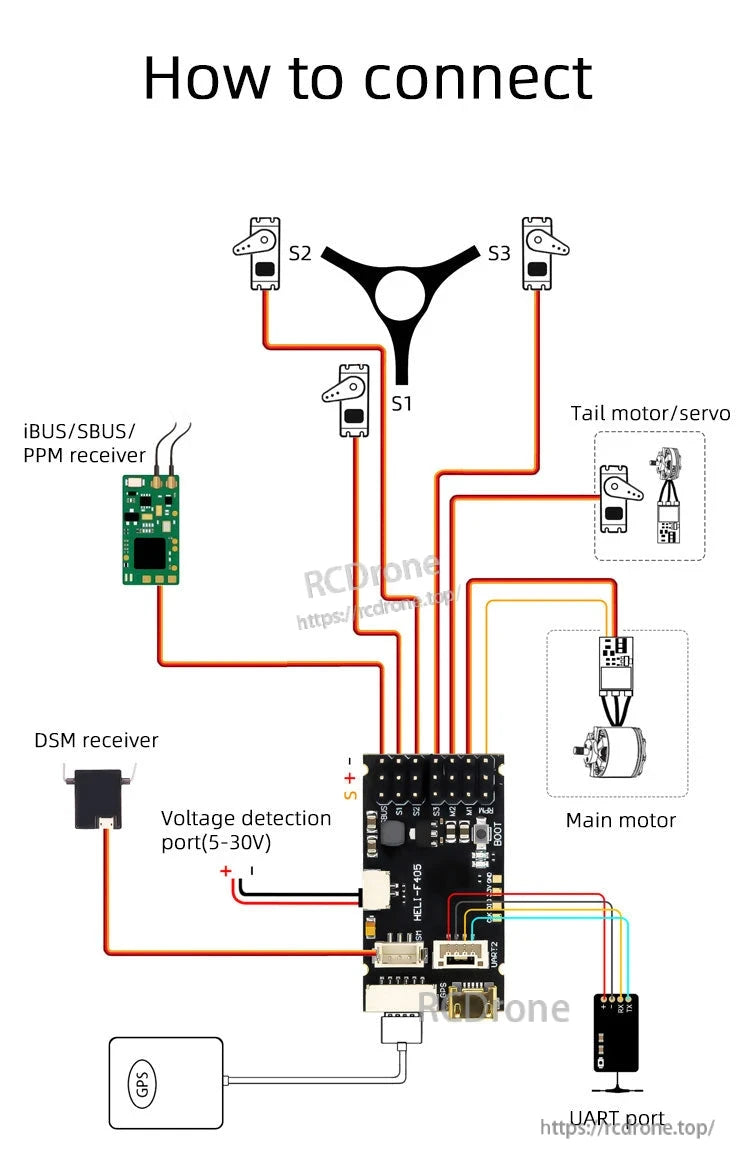
Schéma de connexion pour le contrôleur de vol HELI-P405 avec récepteur, moteurs, GPS et UART.
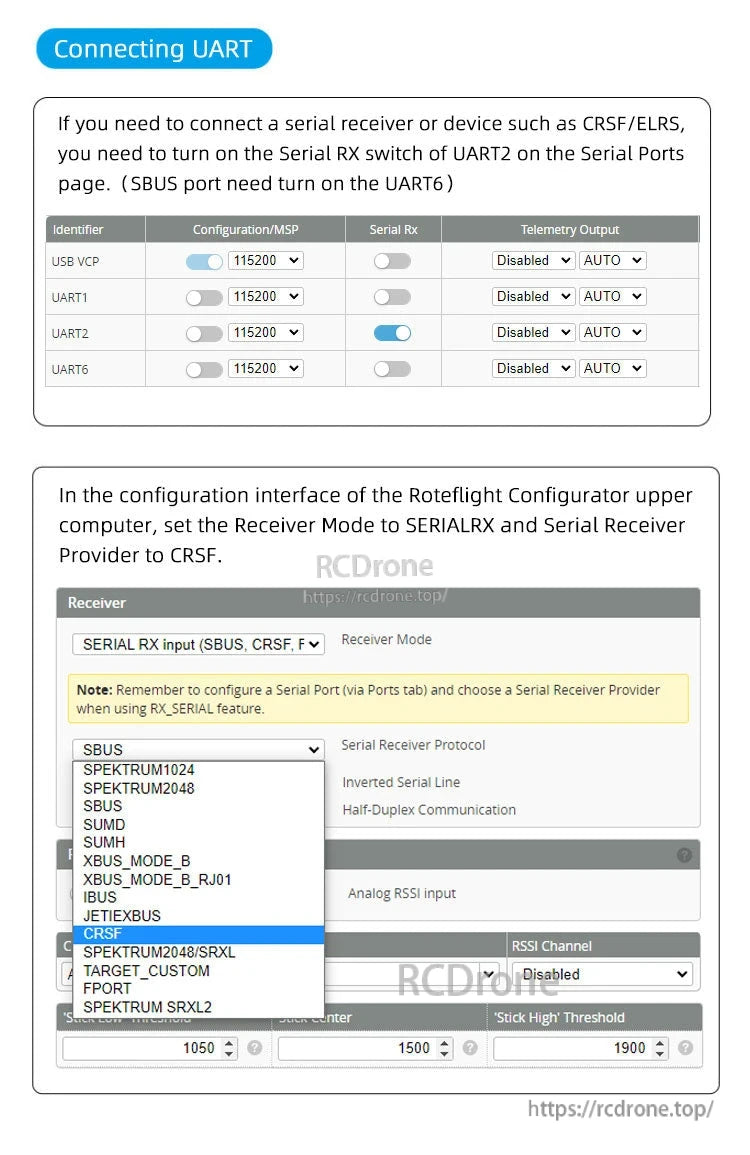
Configurez UART2 pour le récepteur série CRSF/ELRS via les ports série. Réglez le mode récepteur sur SERIALRX et le fournisseur de récepteur série sur CRSF dans le configurateur Rotorflight. Activez la réception série UART2 et sélectionnez CRSF dans la liste déroulante.
Related Collections







