Drone de recherche SU17 - Développement de drones industriels open source PX4 avec LiDAR MID-360, SLAM à quatre caméras, EGO-Swarm
Drone de recherche SU17 - Développement de drones industriels open source PX4 avec LiDAR MID-360, SLAM à quatre caméras, EGO-Swarm
RCDrone
Impossible de charger la disponibilité du service de retrait
Aperçu
Le drone de recherche SU17 est un quadricoptère hautes performances doté d'un Batterie 6000mAh, LiDAR MID-360 pour la cartographie 3D, Système SLAM à quatre caméras pour une localisation précise et intégrée Positionnement GPS+GLONASS. Avec un poids au décollage de 2,3 kg et un capacité de charge utile de 200 g, il offre 21 minutes de temps de vol en mode de positionnement visuel. Alimenté par le logiciel Prometheus, il prend en charge la reconnaissance des cibles, la planification des trajectoires et la navigation autonome, ce qui en fait un de qualité industrielle solution pour la recherche et l'innovation.
Paramètres matériels
Aéronef
| Paramètre | Description |
|---|---|
| Type d'avion | Quadricoptère |
| Poids au décollage (approx.) | 2,3 kg (avec housse de protection et batterie) |
| Distance diagonale | 320 mm |
| Dimensions | Longueur : 442 mm, Largeur : 388 mm, Hauteur : 174 mm (hors housse de protection) |
| Charge utile maximale | 200 g |
| Temps de vol stationnaire | Environ 13 min (avec survol à 100 %, pas en dessous de 0 %), positionnement visuel : 21 min |
| Précision du vol stationnaire | GPS : vertical ± 1,5 m, horizontal ± 2,0 m |
| LiDAR 3D SLAM : vertical ± 0,08 m, horizontal ± 0,08 m | |
| SLAM visuel à 4 caméras : Vertical ± 0,05 m, Horizontal ± 0,05 m | |
| Niveau de résistance au vent | Niveau 4 |
| Température de fonctionnement | -10°C à 40°C |
| Puce MCU principale | STM32H743 |
| Unité de mesure inertielle | ICM42688/BMI088 |
| Baromètre | MS5611 |
| Boussole | QMC5883L |
| Interface | USB Type-C |
Ordinateur de bord
| Paramètre | Description |
|---|---|
| Processeur | Processeur Intel Core i5-8365U |
| Capacité de mémoire | 8 Go |
| Fréquence de la mémoire | LPDDR3@2133MHz |
| Stockage | Disque SSD NVMe 256 Go |
| Port réseau | Baidu Apollo Ethernet X2, 12V@3A power alimentation, prend en charge IEEE 1588-2008 (PTP v2) |
| Port série | Port série TTL X2, 5 V/3.3V@500mA power approvisionnement |
| USB | Type-C X2 (1x USB2.0, 1x USB3.0) |
| HDMI | HDMI 1.4 |
Batterie d'alimentation
| Paramètre | Description |
|---|---|
| Modèle | SU17-L |
| Type de batterie | Batterie lithium-polymère haute pression |
| Tension nominale | 26,4 V (max.), 21 V (min.) |
| Tension de stockage | 22,8 V (typique) |
| Capacité nominale | 6000 mAh |
| Poids | 680 g |
| Dimensions | Longueur : 85,2 mm, Largeur : 86.5 mm, Hauteur : 135 mm |
Télécommande
| Paramètre | Description |
|---|---|
| Modèle | QE-2 |
| Chaînes | 8 |
| Puissance de transmission | 18 à 20 dBm |
| Poids | 294,1 g |
Cardan
| Paramètre | Description |
|---|---|
| Angle contrôlable | -90° ~ 30° (axe d'inclinaison) |
| Protocole de diffusion en continu | RTSP (standard) |
| Format d'encodage | H.264 |
| Résolution | 1080P à 25 images par seconde |
| Champ de vision diagonal (D) | 120° |
| Champ de vision vertical (V) | 54° |
| Champ de vision horizontal (H) | 95° |
Transmission d'images
| Paramètre | Description |
|---|---|
| Fréquence de fonctionnement | 2,4 GHz |
| Puissance de transmission | 18 dBm |
| Portée de communication | 3 km (pas d'interférence, pas d'obstacle) |
| Plage d'images | 1 km (interférence minimale, aucun obstacle) |
| Bande passante maximale | 40 Mbps |
Caméra à quadruple profondeur
| Paramètre | Description |
|---|---|
| Accélérateur de vision | Processeur de signal virtuel Intel Movidius Myriad X |
| Résolution maximale | 1296x816 |
| Fréquence d'images maximale | 1280x800 à 120 images par seconde |
| Type d'obturateur | Obturateur global |
| Format d'encodage | Flux unique 8/10 bits |
| Champ de vision | Champ de vision diagonal de 150°, champ de vision horizontal de 127,4°, champ de vision vertical de 79,7° |
| Nombre de capteurs | 4 (2 avant + 2 arrière) |
| Unité de mesure inertielle | IMC 270 |
GNSS
| Paramètre | Description |
|---|---|
| Précision horizontale | 1,5 m CEP (avec SBAS) |
| Précision de la vitesse | 0,05 m/s |
| Mode de fonctionnement | GPS + GLONASS + BDS + GALILEO + SBAS + QZSS |
Chargeur
| Paramètre | Description |
|---|---|
| Modèle | LK150-2640500 |
| Tension d'entrée CA | 100 V ~ 240 V |
| Tension d'entrée CC | 26.4V |
| Poids | 460 g |
| Courant de charge | 5A |
LiDAR 3D
| Paramètre | Description |
|---|---|
| Modèle | MID-360 |
| Longueur d'onde du laser | 905 nm |
| Plage de mesure | 40 m à 10 % de réflectivité |
| Champ de vision | Horizontal 360°, Vertical -7° ~ 52° |
| Portée minimale | 0,1 m |
| Fréquence ponctuelle | 10 Hz (typique) |
| Sortie de points | 200 000 points/s |
| Interface de données | Ethernet 100 BASE-TX |
| Synchronisation des données | IEEE 1588-2008 (PTP v2), GPS |
| IMU intégré | ICM40609 |
| Tension d'alimentation | 7 à 27 V |
| Dimensions | 65 mm (L) x 65 mm (P) x 60 mm (H) |
| Poids | 115 g |
| Température de fonctionnement | -20°C ~ 55°C |
Paramètres du logiciel
Ordinateur de bord
| Paramètre | Description |
|---|---|
| Modèle | Processeur Intel Core i5-8365U |
| Système | Ubuntu 20.04 |
| Nom d'utilisateur | amov |
| Mot de passe | amov |
| ROS | noétique |
| OpenCV | 4.7.0 |
| Système de positionnement visuel | BSA_SLAM V1 |
Logiciel Prometheus
| Paramètre | Description |
|---|---|
| Version | v2.0 |
| Système de station terrestre Prometheus | v1.24.11.27 (version finale basée sur les enregistrements de publication du wiki) |
Détails
Édition de recherche SU17
Drone de recherche de qualité industrielle
- LiDAR 3D en option:Permet la cartographie, le positionnement et l'évitement des obstacles à la navigation.
- Logiciel de drone autonome Prometheus:Riche en démos pour une maîtrise rapide du contrôle des drones.
- Plateforme de vol de qualité industrielle:Stable et ouvert, établissant une nouvelle norme pour les performances des drones de recherche.

Caractéristiques principales
La recherche SU17 Plateforme de développement de drones (appelé SU17) adopte une conception intégrée, incorporant des contrôleurs de vol, des ordinateurs de bord, des modules SLAM à quatre caméras, des caméras cloud et des modules de transmission d'images pour une intégration de haut niveau, améliorant considérablement la stabilité et la fiabilité du matériel. Équipé du logiciel de drone autonome Prometheus, le SU17 prend en charge des fonctionnalités telles que la reconnaissance de cible, le suivi et la planification de trajectoire pour divers scénarios de contrôle de vol.
Il intègre en option le LiDAR 3D MID-360, associé à l'algorithme FAST-LIO pour réaliser un SLAM LiDAR 3D, offrant des informations de détection et de positionnement environnementales précises. Associé à l'algorithme de planification de trajectoire EGO-Swarm, il permet une cartographie 3D efficace en temps réel et l'évitement des obstacles dans des environnements complexes.




Système logiciel Prometheus V2
La plateforme de développement est construite sur le framework open source ROS et Prometheus, offrant de riches fonctionnalités et de vastes API de développement secondaires pour une reprogrammation efficace. Elle donne accès aux informations de positionnement, aux modes de vol, à l'état de la batterie, aux données IMU et à d'autres interfaces de données d'état et de capteur du drone, ainsi qu'aux interfaces de contrôle pour la position, la vitesse, l'accélération et l'attitude.
De plus, il inclut des exemples d'utilisation pour les API associées. De plus, le drone dispose de fonctions de contrôle de sécurité pour les opérations de vol (anti-crash), permettant une descente automatique dans des conditions anormales, réduisant ainsi le risque de crash et garantissant un processus de développement plus sûr.

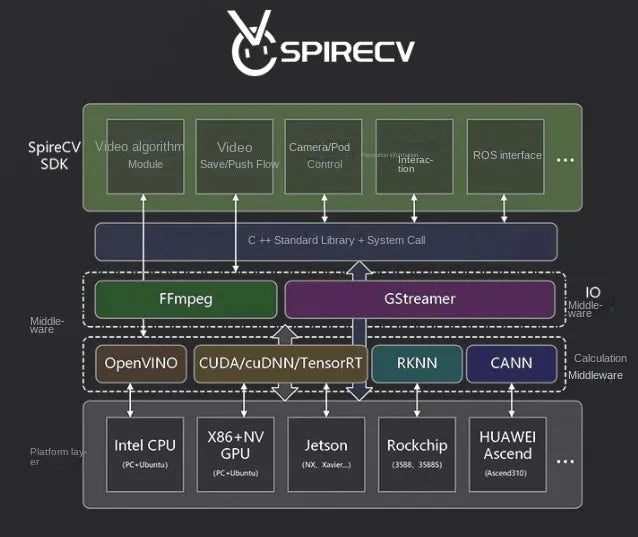
Bibliothèque de vision SpireCV
La bibliothèque SpireCV Vision est un SDK de traitement d'images en temps réel spécialement conçu pour les systèmes de drones intelligents. Il offre des fonctionnalités telles que le contrôle de la nacelle et de la caméra, le stockage et le streaming vidéo, la détection, la reconnaissance et le suivi des cibles.
Ce SDK vise à offrir des performances élevées, une fiabilité et une interface simplifiée aux développeurs de systèmes de drones intelligents. Grâce à une solution de traitement visuel riche en fonctionnalités, il permet aux développeurs de mettre en œuvre efficacement diverses applications complexes basées sur la vision.
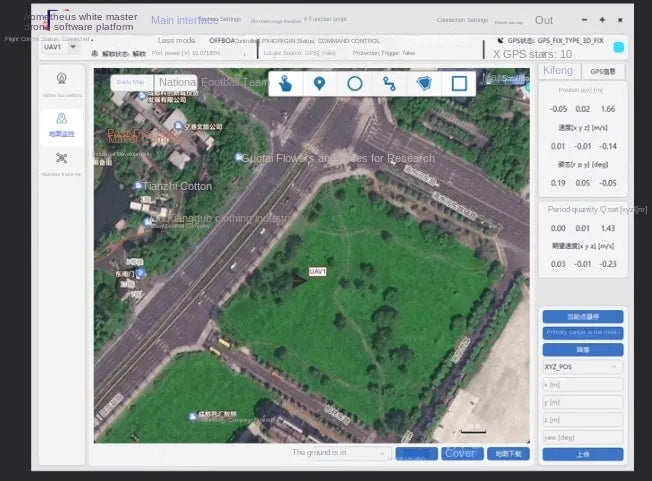
Station terrestre Prometheus
La Prometheus Ground Station est une interface d'interaction homme-drone développée sur la base du système Prometheus, construite à l'aide de la technologie Qt. Elle permet une réplication rapide des fonctionnalités du système Prometheus, offrant une surveillance en temps réel et une visualisation 3D de l'état du drone et des données de contrôle.
Grâce à la station au sol, les utilisateurs peuvent exécuter des commandes telles que le décollage en un clic, le vol stationnaire à la position actuelle, l'atterrissage et le contrôle de position. De plus, le système prend en charge les boutons de fonction personnalisés pour lancer des scripts définis par l'utilisateur ou envoyer des messages personnalisés, améliorant considérablement la commodité, l'efficacité et l'évolutivité des opérations utilisateur.
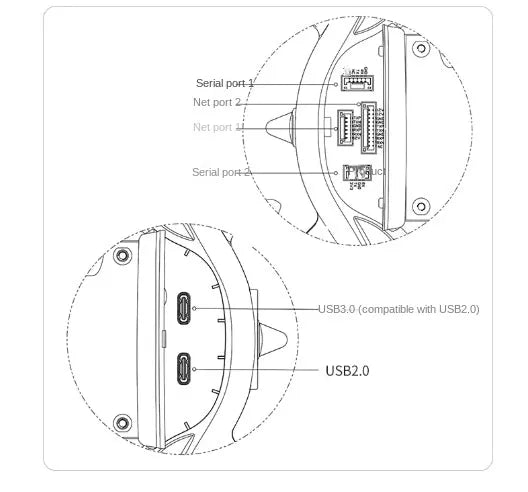
Extension puissante
Ports d'extension matérielle
-
Port série 1
-
Port série 2
-
Port réseau 1
-
Port réseau 2
-
Ports USB:
- USB 3.0 (compatible avec USB 2.0)
- USB 2.0
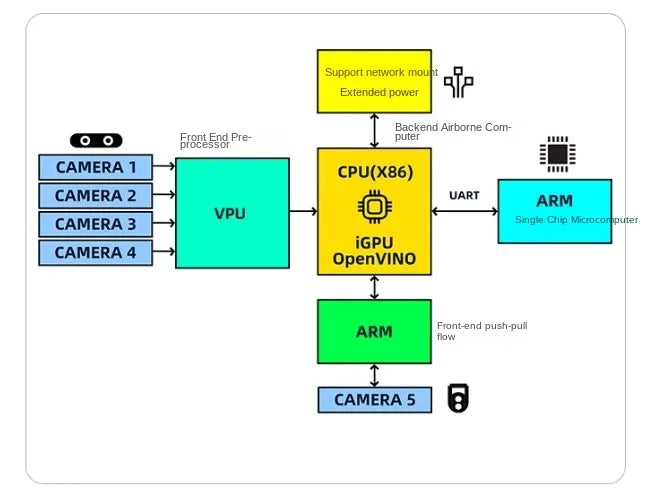
Cadre matériel
L'image illustre l'architecture matérielle du drone SU17, mettant en évidence l'intégration de divers composants pour le traitement avancé des données et le contrôle du système :
-
Caméras (Caméra 1-4):
Connecté à un VPU (Unité de traitement de la vision) pour le prétraitement frontal. -
Unité de puissance virtuelle:
Gère les données visuelles de plusieurs caméras et les transmet aux unités de traitement. -
Processeur (X86) avec iGPU et OpenVINO:
Il sert d'unité de calcul principale pour le traitement back-end, prenant en charge les capacités d'extension connectées au réseau pour une puissance de calcul améliorée. -
Microcontrôleur monopuce ARM:
Interagit avec le CPU via une interface UART pour des fonctionnalités de contrôle supplémentaires. -
Pipelining Front-End et Caméra 5:
Géré par un processeur ARM dédié pour une rationalisation supplémentaire des données.
Ce framework intègre plusieurs unités de traitement, prend en charge l'analyse d'images en temps réel, les tâches de calcul avancées et la communication transparente entre les composants matériels. Il garantit une gestion efficace des opérations complexes dans les applications de recherche et développement.
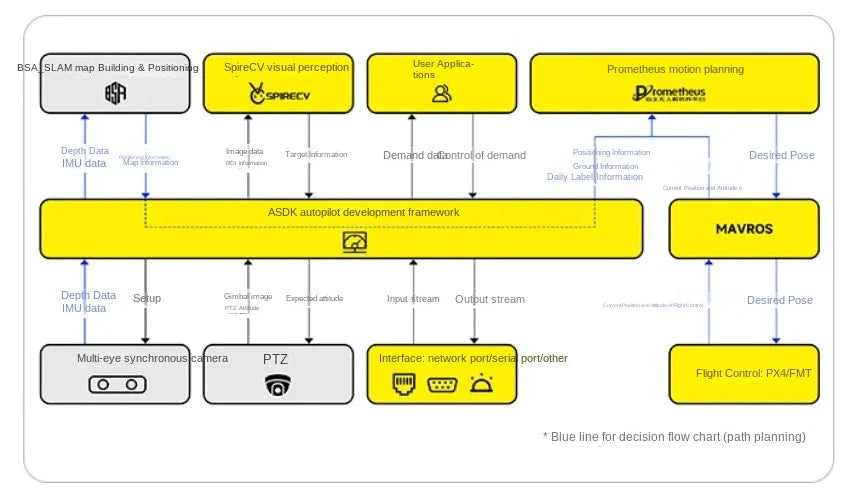
Cadre logiciel
Le schéma illustre l'architecture logicielle du drone SU17, mettant en évidence l'intégration de divers systèmes pour une fonctionnalité autonome :
-
BSA_SLAM (Cartographie et localisation):
- Fournit des données de cartographie spatiale et de positionnement.
- Intègre les entrées de capteur de profondeur et IMU pour une perception précise de l'environnement.
-
SpireCV Vision Perception:
- Traite les données visuelles, y compris la détection d'objets, les informations de retour sur investissement et le suivi des cibles.
-
Applications utilisateur:
- Interfaces pour les tâches pilotées par l'utilisateur telles que la visualisation de données et la saisie de commandes.
-
Planification des mouvements de Prometheus:
- Gère la planification de la trajectoire à l'aide des données de position, de vitesse et de cible.
-
Cadre de conduite autonome ASDK:
- Il sert de couche de traitement centrale, gérant le flux de données entre les capteurs, les caméras, les modules cloud et les interfaces externes.
- Prend en charge plusieurs canaux d'entrée/sortie (par exemple, ports réseau, ports série).
-
MAVROS:
- Communique avec les systèmes de contrôle de vol (PX4/FMT) pour le contrôle de l'état de vol et de la position.
-
Module Cloud et caméras multi-synchronisées:
- Intègre des données basées sur le cloud pour un traitement avancé.
- Synchronise les entrées visuelles pour des opérations de haute précision.
Lignes bleues:Représenter les voies de prise de décision pour la planification de trajectoire.
Cette architecture démontre une conception modulaire et extensible, permettant une communication transparente entre divers composants matériels et logiciels pour un fonctionnement robuste du drone.
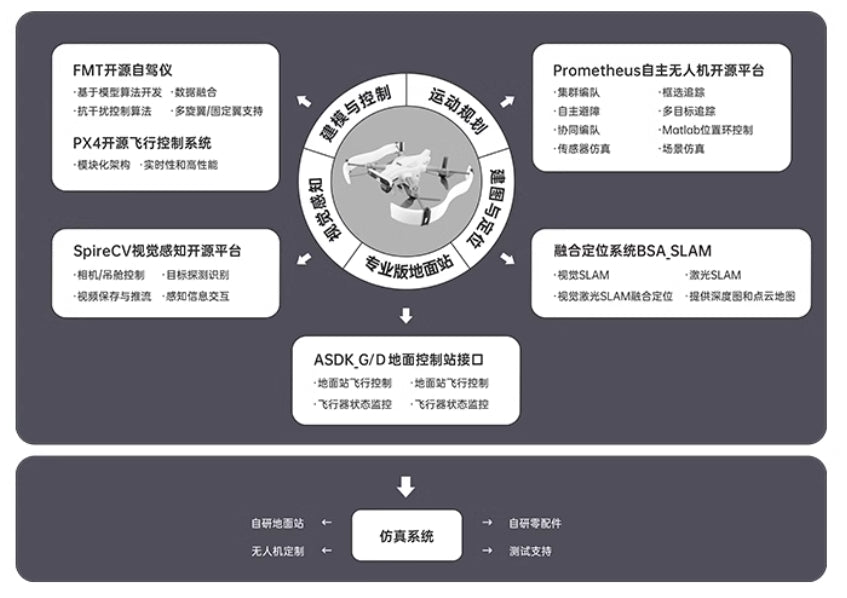
Ouverture intelligente : solution intégrée pour système de drone
Le schéma présente une architecture complète et ouverte pour les systèmes de drones, mettant l'accent sur la modularité et l'intégration entre différents composants :
-
Composants de base:
- Pilote automatique open source FMT:Fournit un contrôle de vol fiable basé sur un développement modulaire, prenant en charge divers environnements et l'intégration de données.
- Système de contrôle de vol PX4:Assure la stabilité et prend en charge la personnalisation modulaire avancée.
- Plateforme de perception visuelle SpireCV:Se concentre sur le traitement d'images, y compris la détection d'objets, le suivi et la diffusion vidéo en temps réel.
-
Cadres clés:
- Plateforme de drone autonome Prometheus:Comprend le contrôle multi-drone, la planification des mouvements, la navigation collaborative et les simulations du monde réel.
- Système BSA_SLAM:Combine le SLAM basé sur la vision et le SLAM basé sur le LiDAR pour un positionnement et une cartographie précis.
- Interface de contrôle de la station au sol ASDK G/D:Permet une communication transparente entre les stations au sol et les drones pour la surveillance et les ajustements en temps réel.
-
Intégration du flux de travail:
- Met en évidence des processus tels que la planification des mouvements, la cartographie de l'environnement et la navigation autonome.
- Intégration avec des stations au sol professionnelles pour le contrôle de trajectoire, l'évitement d'obstacles et la gestion des données en temps réel.
-
Prise en charge de la simulation:
- Comprend un système de simulation pour les tests de mission autonomes, le contrôle des drones et la validation des composants.
Ce système démontre une solution de pointe pour le développement de drones autonomes, avec des capacités évolutives pour la recherche, l’application et les tests dans divers scénarios.
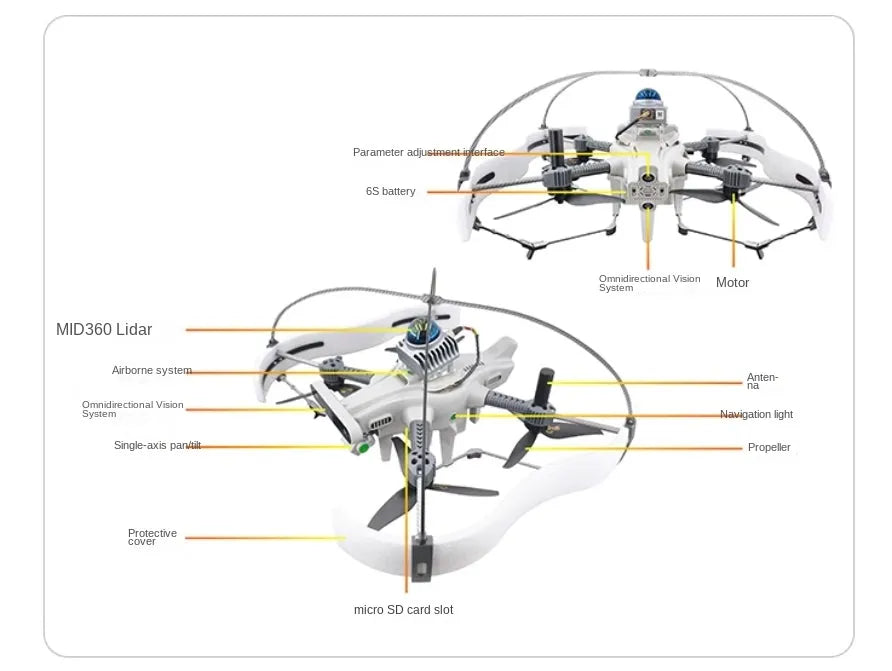
les composants structurels du drone de recherche SU17, soulignant sa stabilité et sa conception avancée. Les principales caractéristiques comprennent LiDAR MID360 pour une cartographie précise, un système de vision omnidirectionnel pour une perception environnementale globale, une cardan à axe unique pour une imagerie stabilisée et une robuste Batterie 6S pour une puissance prolongée. D'autres composants essentiels incluent le système d'hélice, antenne, feux de navigation, et un Emplacement pour carte micro SD pour le stockage des données. La conception intègre du matériel de pointe, garantissant fiabilité et hautes performances pour diverses applications de recherche.