








Kit Pembangunan Dron Pemasangan CQ230 - Raspberry Pi 4B Pixhawk Ardupilot Perindustrian Sumber Terbuka Kit Dron DIY Boleh Diprogramkan Dengan Rak Anti-perlanggaran
Kit Pembangunan Dron Pemasangan CQ230 - Raspberry Pi 4B Pixhawk Ardupilot Perindustrian Sumber Terbuka Kit Dron DIY Boleh Diprogramkan Dengan Rak Anti-perlanggaran
RCDrone
Tidak dapat memuatkan ketersediaan pengambilan
Gambaran keseluruhan
Kit Pembangunan Dron Pemasangan CQ230 ialah padat, sumber terbuka Drone DIY platform dikuasakan oleh Raspberry Pi 4B dan Pixhawk pengawal penerbangan. Menampilkan jarak roda 230mm, rangka anti-perlanggaran dan sistem kuasa 4S (16.8V), dron ini sesuai untuk belajar dan bereksperimen dengan ciri boleh atur cara sumber terbuka. Platform ini dilengkapi sepenuhnya untuk tugas seperti navigasi titik laluan, pemantauan data dan penstriman video masa nyata, menjadikannya pilihan yang sangat baik untuk pembangun dan pemula.
Ciri-ciri Utama
- Reka Bentuk Padat: Dengan saiz 360mm x 360mm x 300mm, dron ini sesuai untuk ruang kecil.
- Rak Anti-Perlanggaran: Bingkai anti-perlanggaran gentian karbon penuh memastikan ketahanan dan perlindungan.
- Penyepaduan Raspberry Pi 4B: Dipertingkatkan dengan Ubuntu 20.04 untuk operasi dan pembangunan yang lancar.
- Rangka Kerja Sumber Terbuka: Dikuasakan oleh Ardupilot, menyokong Dronkit, MAVLink dan ROS.
- Boleh diprogramkan Tugasan: Mampu navigasi autonomi, pemantauan data masa nyata dan pemprosesan visual.
- Navigasi Titik Jalan: Tetapkan laluan dengan ketepatan berasaskan GPS.
- Penghantaran Data Masa Nyata: Pemindahan data yang didayakan WiFi ke stesen bumi.
- Navigasi Visual: Sistem dwi-kamera untuk navigasi dalaman yang tepat dan mengelakkan halangan.
- Kawalan Boleh Diprogram: Gunakan Dronekit-Python untuk mencipta arahan penerbangan tersuai.
- Simulasi Sistem: Gabungkan simulasi SITL untuk ujian kefungsian yang lancar.
Spesifikasi
| Parameter | Butiran |
|---|---|
| Model | CQ230 |
| Jarak roda | 230mm |
| Bateri | 4S (16.8V) |
| Masa Penerbangan | 7 minit |
| Kapasiti Muatan | 200g |
| Rintangan Angin | Tahap 3-4 |
| Kelajuan Maks | 20 km/j |
| Ketinggian Penerbangan Maks | 120m |
| Ketepatan Kedudukan | 2-3m (GPS) |
| Berat badan | 612g |
| Julat Kawalan Jauh | 700m |
Pakej
Versi Asas
- Pixhawk 2.4.8 Pengawal Penerbangan ×1
- M8N GPS ×1
- Modul Kuasa MINI PIX Ledi ×1
- Telemetri WiFi CUAV ×1
- 30A ESC ×4
- 5045 Kipas ×4
- Bingkai CQ230 ×1
- Pengecas Baki A400 ×1
- Bateri 4S 2300mAh ×1
- 2205 Motor ×4
- Alat Kawalan Jauh FS-i6 ×1
- Buzzer Penggera BB ×1
- MF-01 Modul Aliran Optik ×1
Versi Visual
- Pixhawk 2.4.8 Flight Controller ×1
- GPS M8N ×1
- Modul Kuasa MINI PIX Ledi ×1
- Kamera CS ×1
- 30A ESC ×4
- 5045 Kipas ×4
- Bingkai CQ230 ×1
- Buzzer Penggera BB ×1
- MF-01 Modul Aliran Optik ×1
- Pengecas Baki A400 ×1
- Bateri 4S 2300mAh ×1
- 2205 Motor ×4
- Alat Kawalan Jauh FS-i6 ×1
- Komputer Dalam Papan Raspi 4B-4G ×1 Set
- Kamera Visual T265 ×1
Aplikasi
- Penghantaran: Mengangkut barang ringan dengan cekap.
- Perkembangan Pendidikan: Sesuai untuk pelajar dan penyelidik meneroka sistem dron.
- Pemprosesan Visual: Gunakan OpenCV untuk penstriman dan analisis video lanjutan.
- Eksperimen Navigasi: Eksperimen dengan penerbangan berasaskan GPS autonomi dan penjejakan kedudukan.
Nota Tambahan
- Sistem ini termasuk Ubuntu 20.04 untuk antara muka pengaturcaraan yang dipertingkatkan.
- Ekosistem Ardupilot yang teguh memastikan kebolehskalaan dan serba boleh dalam aplikasi dron.
- Kit pembelajaran lengkap dengan tutorial yang disediakan untuk pemula dan profesional.
Butiran
Sistem Dron Sumber Terbuka CQ230

Pixhawk: Sistem Perkakasan Drone
Menggunakan pengawal Pixhawk 2.4.8, dilengkapi dengan pemproses 32-bit standard baharu STM32F427 dan dipasangkan dengan barometer 5611. Ia adalah pengawal sumber terbuka yang menjimatkan kos dengan pilihan antara muka yang kaya.

ArduPilot: Sistem Perisian Drone
Sistem perisian dron—pada asasnya perisian tegar kawalan—menggunakan projek sumber terbuka ArduPilot yang diterima pakai secara meluas.
(ArduPilot menyediakan sistem perisian autopilot sumber terbuka yang canggih, berciri penuh dan boleh dipercayai.)
Ia boleh mengawal semua sistem dron yang boleh dibayangkan. Bagi mereka yang menyukai teknologi, dron dan meneroka, memahami ArduPilot akan memperkenalkan anda kepada dunia yang menarik dan menarik.

ArduPilot telah dipasang di lebih 1,000,000 sistem dron di seluruh dunia. Dilengkapi dengan alat pengelogan, analisis dan simulasi data lanjutan, ia adalah sistem autopilot yang diuji dengan teliti dan boleh dipercayai. Ia juga digunakan oleh organisasi dan syarikat utama seperti NASA, Intel, Insitu, Boeing, dan banyak institut dan universiti di seluruh dunia untuk ujian dan pembangunan.

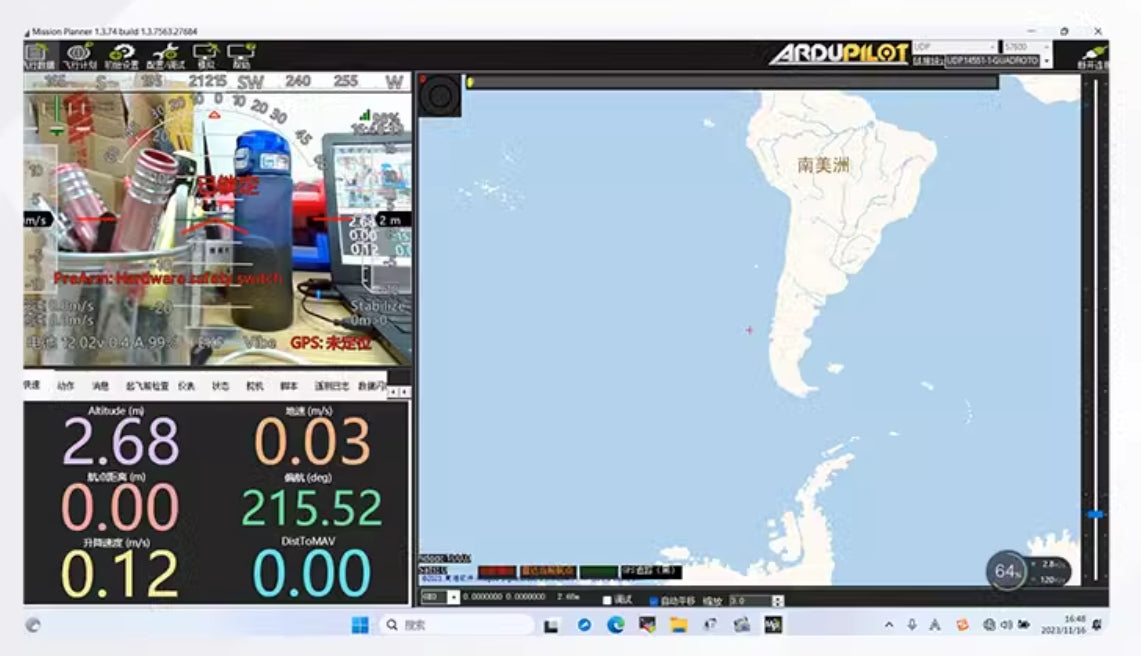
Stesen Kawalan Tanah Perancang Misi
ciri-ciri:
- Penalaan dron dan alat persediaan parameter;
- Tetapkan laluan penerbangan pada peta, membolehkan dron mengikuti laluan pratetap secara automatik;
- Pilih arahan misi daripada menu lungsur turun untuk mengawal dron;
- Muat turun dan analisis log;
- Melakukan simulasi menggunakan sistem SITL (Software In The Loop);
- Lebih banyak ciri menanti penemuan anda, dan kemungkinannya tidak berakhir di sini...


| Ciri Pratakrif | Versi Asas | Versi Visual |
|---|
| Lukisan Garisan | ✓ | ✓ |
| Tahan Ketinggian, Tuding, Penstabilan | ✓ | ✓ |
| Pulang ke Rumah, Pulang dengan Gagal | ✓ | ✓ |
| Pendaratan, Pendaratan Bateri Rendah | ✓ | ✓ |
| Kedudukan GPS Luaran dan Penerbangan Laluan | ✓ | ✓ |
| Kawalan Boleh Aturcara Dronkit-Python | ✓ | ✓ |
| Telemetri WiFi untuk Penghantaran Data Masa Nyata (Julat Kira-kira 5m) | ✗ | ✓ |
| Kedudukan Aliran Optik Dalaman, Pembetulan Ketinggian Laser | ✓ | ✓ |
| Navigasi Kedudukan Dwi Visual Dalaman, Titik Sauh MP, Penerbangan Laluan, Pendaratan Tepat dengan Pengecaman Kod QR | ✗ | ✓ |
Sesuai untuk Penerbangan Dalam Ruangan
Reka bentuk padat dengan dimensi 360mm × 360mm × 300mm, sesuai untuk operasi ruang kecil.

Bingkai gentian karbon, kuat dan tahan jatuh

Reka bentuk cincin anti-perlanggaran melindungi motor dan bilah kipas dengan berkesan untuk memastikan keselamatan penerbangan;

Kebolehkembangan Dipertingkat untuk Pembangunan Fungsi Berbilang Senario
Berdasarkan model asas, sistem ini menambah Raspberry Pi 4B dan telah menyepadukan sistem Raspberry Pi. Sistem ini termasuk:
- Ubuntu 20.04 (sistem pengendalian sumber terbuka dengan antara muka grafik)
- Dronkit-Python (perpustakaan Python untuk kawalan dron pengaturcaraan menggunakan Dronkit)
- Pymavlink (pelaksanaan Python bagi protokol MAVLink, membolehkan kawalan dron boleh atur cara menggunakan Pymavlink)
- ROS (Sistem Pengendalian Robot)
- Mavros (protokol komunikasi untuk mengawal dron melalui ROS)
- Gstreamer (transmisi penstriman video kependaman rendah)
- Penghala Mavlink (mengedarkan data MAVLink pengawal penerbangan ke titik akhir yang berbeza)
- OpenCV (perpustakaan perisian sumber terbuka untuk pemprosesan penglihatan komputer)

Berdasarkan sistem di atas, dron boleh mencapai:
- Kawalan dron boleh atur cara menggunakan Dronkit-Python
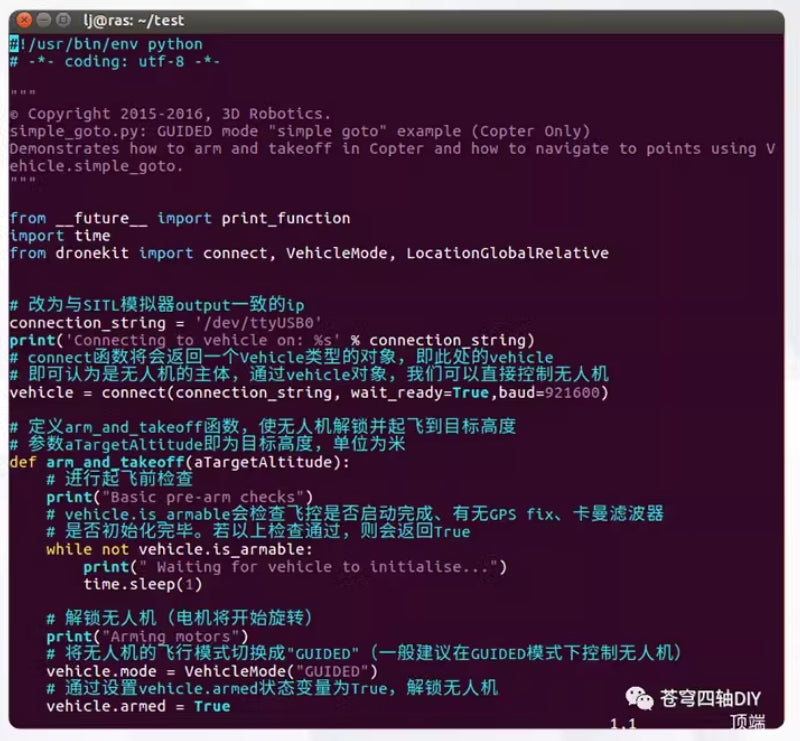
2. BUKA Pemprosesan Visual CV
Menambah kamera CSI, membolehkan penghantaran imej dan pemprosesan pasca:
- Strim visual boleh ditangkap menggunakan Raspberry Pi dan diproses dengan alatan seperti OpenCV.
- Strim video HD masa nyata juga boleh dihantar kembali ke PC untuk diproses atau dihantar ke peranti mudah alih untuk semakan.

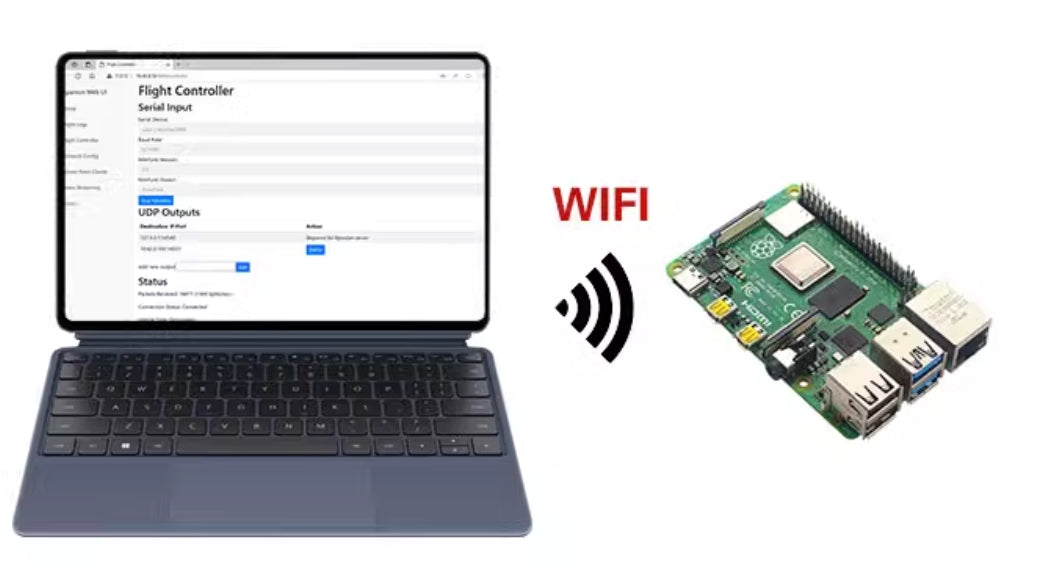
3. Penghantaran Video HD Masa Nyata
4.Pemantauan Data Stesen Tanah
Komunikasi dan penghantaran imej antara rangkaian WiFi dan stesen bumi (MP) PC boleh dicapai tanpa memerlukan modul penghantaran tambahan. Selepas PC bersambung ke hotspot WiFi 4B, penghantaran data dan imej boleh dimulakan dengan mengakses 10.42.0.10:3000 melalui pelayar web.
5. Membangunkan Ciri Tambahan dan Pengesahan Algoritma Berdasarkan Sistem Sumber Terbuka Di Atas
Tutorial Menyokong Versi Visual:
Sebagai tambahan kepada tutorial versi asas, tutorial pengenalan untuk pemprosesan visual Raspberry Pi juga disediakan.
Related Collections









