







P600 Drone Wetenschappelijk onderzoek Drone - ROS AI Experimentele secundaire programmering Industrieel ontwikkelingsplatform Studio Lab Drone DIY Kit
P600 Drone Wetenschappelijk onderzoek Drone - ROS AI Experimentele secundaire programmering Industrieel ontwikkelingsplatform Studio Lab Drone DIY Kit
RCDrone
Kan beschikbaarheid voor afhalen niet laden
Overzicht
De P600 Wetenschappelijk Onderzoeks Drone is een geavanceerd platform dat is ontworpen voor wetenschappelijk onderzoek, industriële ontwikkeling en AI-experimenten. Uitgerust met een high-performance NVIDIA Jetson Orin NX computermodule, het levert 100 TOPS rekenkracht, waardoor het ideaal is voor geavanceerde AI-toepassingen. Deze drone beschikt over een 40x optische zoom cardanische camera voor beeldvorming met hoge resolutie, 3D LiDAR-SLAM voor nauwkeurige kartering, en RTK-positionering voor nauwkeurigheid op centimeterniveau. geïntegreerde Prometheus V2-software En SpireCV visiebibliotheek ondersteuning van secundaire programmering, waardoor het een veelzijdige tool is voor ontwikkelaars. Met een vluchttijd van maximaal 21 minuten, A 600 mm diagonale as, en een robuuste 4,05 kg startgewichtDe P600 is geoptimaliseerd voor dynamische onderzoeks- en ontwikkelingsomgevingen.
Specificaties
Vliegtuig
| Attribuut | Details |
|---|---|
| Vliegtuigtype | Quadcopter |
| Startgewicht | Ongeveer 4,05 kg (inclusief accu) |
| Diagonale asafstand | 600mm |
| Afmetingen | Lengte 469 mm, Breedte 469 mm, Hoogte 400 mm |
| Maximale zweeftijd | Ongeveer 21 min. |
| Zweefnauwkeurigheid | RTK: ±0,015 m (horizontaal), ±0,01 m (verticaal) 3D LiDAR SLAM: ±0,2 m (horizontaal), ±0,1 m (verticaal) |
| Bedrijfstemperatuur | 6°C tot 40°C |
| Hoofd MCU-chip | STM32H743VIT6 / 216 MHz / 2M programmaopslag / 512 KB dataopslag |
| IMU | ICM20689 |
| Barometer | BMP388 |
| MTD | AT24C64 |
| I/O-interfaces | Ingebouwde PX4IO-V2, ondersteunt 8PWM-interfaces, 1RC-interface (ondersteunt SBus, PPM, DSM) Externe interfaces: 3UART (GH1.25 6-pins), 1CAN (GH1.25 4-pins), USB-interface voor vluchtbesturing (Type-C) |
Boordcomputer
| Attribuut | Details |
|---|---|
| Naam | Allspark-Orin NX boordcomputer |
| Model | IA160_V1 |
| Gewicht | Ongeveer 188 gram |
| Afmetingen | 102,5 mm × 62,5 mm × 31 mm (inclusief ventilator) |
| Verwerker | NVIDIA Jetson Orin NX |
| Geheugen | 16 GB LPDDR5 |
| Rekenkracht | 100 TOPPEN |
| GPU | Geïntegreerde 32 Tensor Cores van 1024-core NVIDIA Ampere-architectuur GPU |
| CPU | 8-core Arm® Cortex®-A78AE v8.2 64-bits CPU (2 MB L2 + 4 MB L3) |
| SSD | 128 GB (M.2 interface, uitbreidbaar) |
| Ethernet | 100 Mbps x2 (1 speciale Ethernet-poort, 1 verwisselbare) |
| Wi-Fi | 5G |
| Weergave | Micro-HDMI (1920*1080P) |
| USB-poorten | USB2.0: Type-A x1, Type-C x1 USB2.0: OTG x1 |
| Stroomvoorziening | 10~26V bij 3A |
Stroombatterij
| Attribuut | Details |
|---|---|
| Model | LPB610HV |
| Capaciteit | 10000mAh |
| Batterijgewicht | 1,2 kilo |
| Bedrijfsspanning | 22V~26.1V |
| Opslagspanning | 23.1V |
| Afmetingen | Lengte 180 mm, Breedte 90 mm, Hoogte 63 mm |
Afstandsbediening
| Attribuut | Details |
|---|---|
| Model | H16 |
| Kanalen | 16 |
| Frequentie | 2,400~2,483 GHz |
| Bedrijfsspanning | 4,2V |
| Batterij | 20000mAh |
| Oplaadpoort | Type-C 9V-2A |
| Gewicht | 1034 gram |
| Afmetingen | Lengte 272 mm, Breedte 183 mm, Hoogte 94 mm |
Communicatieverbinding
| Attribuut | Details |
|---|---|
| Model | R16 |
| Communicatie afstand | Ongeveer 600 meter, bandbreedte 3,5 Mbps |
| Bedrijfsspanning | 7,2V~72V |
| Interfaces | 2UART-1Ethernet-netwerk, 1HDMI-aansluiting, 1Type-C |
| Afmetingen | Lengte 76 mm, Breedte 69 mm, Hoogte 11 mm |
Cardanische camera
| Attribuut | Details |
|---|---|
| Model | GX40 |
| Afmetingen cardanische ophanging | Lengte 85,8 mm, Breedte 86 mm, Hoogte 129,3 mm |
| GCU-afmetingen | Lengte 45,4 mm, Breedte 40 mm, Hoogte 13,5 mm |
| Gewicht cardanische ophanging | 405 gram |
| GCU-gewicht | 18,6 gram |
| Bedrijfsspanning | 14V~53V |
| Streamingprotocol | RTSP (standaard) |
| Coderingsformaat | H.264 / H.264H / H.264B / H.265 / MJPEG |
| Oplossing | - 4K30fps - 1080P@30fps - SCGA (12801024)@30fps <br> - 1.3M (1280960) bij 30 fps - 720P@30fps |
| Bitsnelheid | 0,[email protected], 0,[email protected] |
Lens
| Attribuut | Details |
|---|---|
| Type | Optische zoomlens |
| Brandpuntsafstand | 4,8 tot 48 mm |
| Diafragma (F/NO) | f1.7~f3.2 |
| Diagonaal gezichtsveld (D) | 67,2°~7,6° |
| Verticaal gezichtsveld (V) | 36,1°~3,7° |
| Horizontaal gezichtsveld (H) | 60,2°~6,6° |
| Optische zoomverhouding | 10x |
Beeldsensor
| Attribuut | Details |
|---|---|
| Sensortype | CMOS |
| Effectieve pixels | 8,29 miljoen |
| Sensorgrootte | 1/2,8'' |
| Pixelgrootte | 1,45×1,45 (μm) |
| Elektronische sluitertijd | 1~1/30000s |
Verlichter
| Attribuut | Details |
|---|---|
| Type | Laser |
| Golflengte | 850±10nm |
| Stroom | 0,8W |
| Verlichtingsafstand | ≤200 meter |
RTK
| Attribuut | Details |
|---|---|
| Model | M15-RTK |
| Gewicht | 90 gram |
| Afmetingen | Lengte 80 mm, Breedte 50 mm, Hoogte 20 mm |
| Ondersteunde satelliettypen | BDS/GPS/GLONASS/QZSS |
| Stroomvoorziening | 9~36V (12V aanbevolen) |
| Antenne connector | SMA-F |
| Functionele poorten | UARTx2, CANx1, USB2.0x1 |
Oplader
| Attribuut | Details |
|---|---|
| Model | C1-XR |
| AC-ingangsspanning | 100~240V |
| DC-ingangsspanning | 11~18V |
| Afmetingen | Lengte 130 mm, Breedte 115 mm, Hoogte 61 mm |
| Gewicht | 380 gram |
| Laadstroom | 0.1A~10A |
| Ondersteunde batterijcellen | 1~6 cellen |
3D-LiDAR
| Attribuut | Details |
|---|---|
| Model | MID360 |
| Lasergolflengte | 905nm |
| Detectiebereik | 40 m (bij 105% reflectiviteit) |
| Gezichtsveld (FOV) | Horizontaal: 360°, Verticaal: -7°~52° |
| Minimaal bereik | 0,1 miljoen |
| Puntenwolk tarief | 10 Hz (typisch) |
| Punten per seconde | 200.000 punten/seconde |
| Gegevensinterface | 100 BASE-TX Ethernet |
| Gegevenssynchronisatie | IEEE 1588-2008 (PTP v2), GPS |
| Interne IMU | ICM40609 |
| Stroomvoorziening | 7~27V |
| Afmetingen | 65 mm (B) x 65 mm (D) x 60 mm (H) |
| Gewicht | 115 gram |
| Bedrijfstemperatuur | -20°C ~ 55°C |
Softwareparameters
Boordcomputer
| Attribuut | Details |
|---|---|
| Model | Jetson Orin NX |
| Besturingssysteem | Ubuntu 20.04 |
| Gebruikersnaam | amov |
| Wachtwoord | amov |
| L4T-versie | 35.2.1 |
| Jetpack-versie | 5.1 |
| CUDA-versie | 11.4.315 |
| Realsense-SDK | 2.50.0 |
| ROS-versie | noëtisch |
| OpenCV-versie | 4.7.0 |
| Realsense ROS | 2.3.2 |
Pakketlijst
| Naam | Specificatie/Model | Hoeveelheid/eenheid |
|---|---|---|
| P600 Hoofd Vliegtuig | P600-Allpark2-RTK-GX40-S3 | 1 set |
| M15-RTK-aardaansluiting | M15-RTK | 1 stuk |
| GNSS Paddestoelantenne | Paddestoelantenne | 1 stuk |
| GNSS-antenneverlengkabel | Antenne verlengkabel | 1 kabel |
| H16 Afstandsbediening | H16 | 1 eenheid |
| 6S 10000mAh Power-batterij | 6S 10000mAh | 1 set |
| 3S 4000mAh Lithium-batterij | 3S 4000mAh | 1 set |
| Slimme balancerende oplader | C1-XR | 1 eenheid |
| Netwerkkabel | 1,5 meter | 1 kabel |
| Veiligheidstouw | 50 meter | 1 pakket |
| HDMI-beugel | / | 1 stuk |
| HDMI-adapterkabel | / | 1 stuk |
| Computerconfiguratie | / | 1 stuk |
| 2D-valplaat | 35×35cm | 1 stuk |
| Luchtvaartzaak | 740×540×510mm | 1 set |
| Accessoire kabelpakket | / | 1 pakket |
| Certificaat | / | 1 vel |
| Controlelijst voor functietest | / | 1 vel |
Details
Prometheus 600 Wetenschappelijk onderzoeksdrone-ontwikkelingsplatform
De Prometheus 600 Wetenschappelijk onderzoeksdrone-ontwikkelingsplatform (aangeduid als P600) is het vierde generatie product in de P600-serie. Het integreert twee kerntechnologieën diepgaand, Prometheus En SpireCV, en is uitgerust met een 40x optische zoom gimbal camera. Deze opstelling maakt lange-afstandsdoeldetectie en tracking, autonome landing vanaf grote hoogte en luchtcruisemissies mogelijk.
Het systeem ondersteunt 3D LiDAR SLAM met Snel-lio, waarmee een zeer nauwkeurige 3D SLAM-mapping wordt bereikt. Daarnaast beschikt het over de EGO-Swarm multi-agent samenwerkingsalgoritme, waardoor toepassingen in verschillende scenario's mogelijk zijn, zoals 3D-ruimtelijke reconstructie binnen en buiten en het vermijden van obstakels tijdens dronenavigatie.
Deze geavanceerde mogelijkheden worden aangevuld door de Prometheus professioneel grondstation, dat visuele feedback in realtime, operationele bewaking en dynamische parameteraanpassing biedt, waardoor ontwikkelaars de secundaire ontwikkeling gemakkelijker onder de knie kunnen krijgen en kunnen versnellen.

Drie versies van de P600-drone

Flexibele besturing van de optisch-elektronische cardanische ophanging
De GX40 gimbalcamera ondersteunt multi-scenariobesturing en integreert ketengebaseerde afstandsbediening om doelzoeken mogelijk te maken tijdens waypointnavigatie. Met behulp van de SpireCV visiebibliotheek, het vergemakkelijkt het detecteren en volgen van doelen, waardoor real-time vergrendeling van de cardanische ophanging op het doel wordt bereikt.
- Nachtverlichting
- Doeldetectie en -tracking

Doelklik en tracking
Met behulp van de YOLOv5-detectiealgoritme en door gebruik te maken van de universele COCO-dataset worden doelen gedetecteerd en gevolgd. Nanotrack-trackingalgoritme vergrendelt op geselecteerde doelen voor tracking. Zonder veranderingen in omstandigheden kunnen doelen tot 30 meter verderop worden geïdentificeerd en gevolgd. Door 40x optische zoom en elektronische zoom, worden detectie en tracking van lange afstandsdoelen bereikt. Tijdens dronetracking is de Prometheus professioneel grondstation maakt dynamische schakelaars voor doelvolging op basis van afstand mogelijk (standaard is 10 meter).
- Tracking op 30m
- Tracking op 20m
- Tracking op 10m

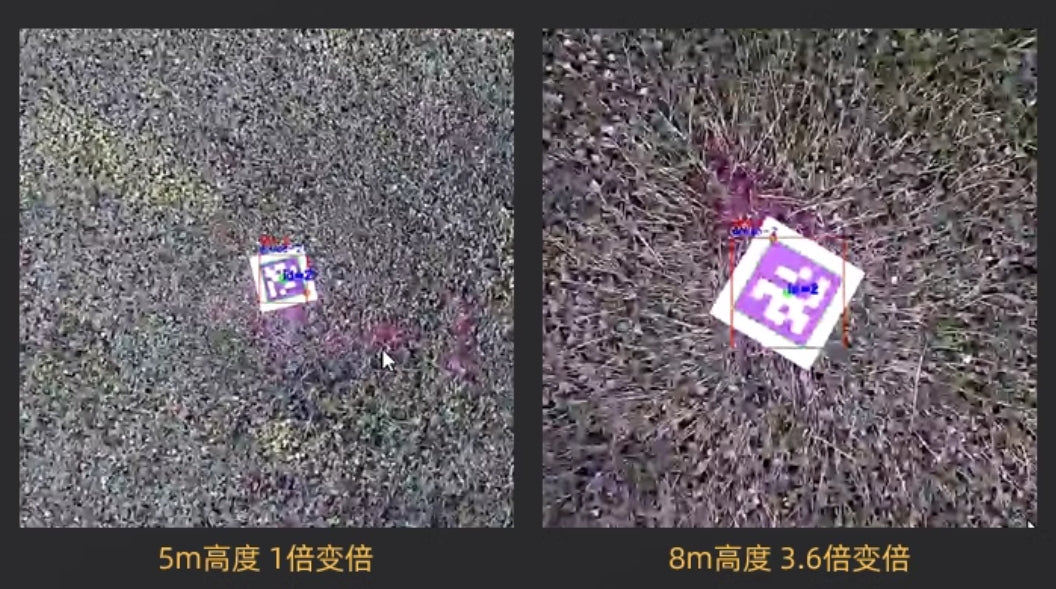
QR-codegeleide landing
Met behulp van de SpireCV visiebibliotheek, nauwkeurige detectie en positieschatting van QR-codes worden bereikt. De GX40 kan nauwkeurig geleide landingen uitvoeren op QR-codes vanaf verschillende hoogtes. Het midden van de gimbalcamera is uitgelijnd met het midden van de QR-code binnen een foutmarge van 30 cm.
- 5m hoogte, 1x zoom
- 8m hoogte, 3,6x zoom
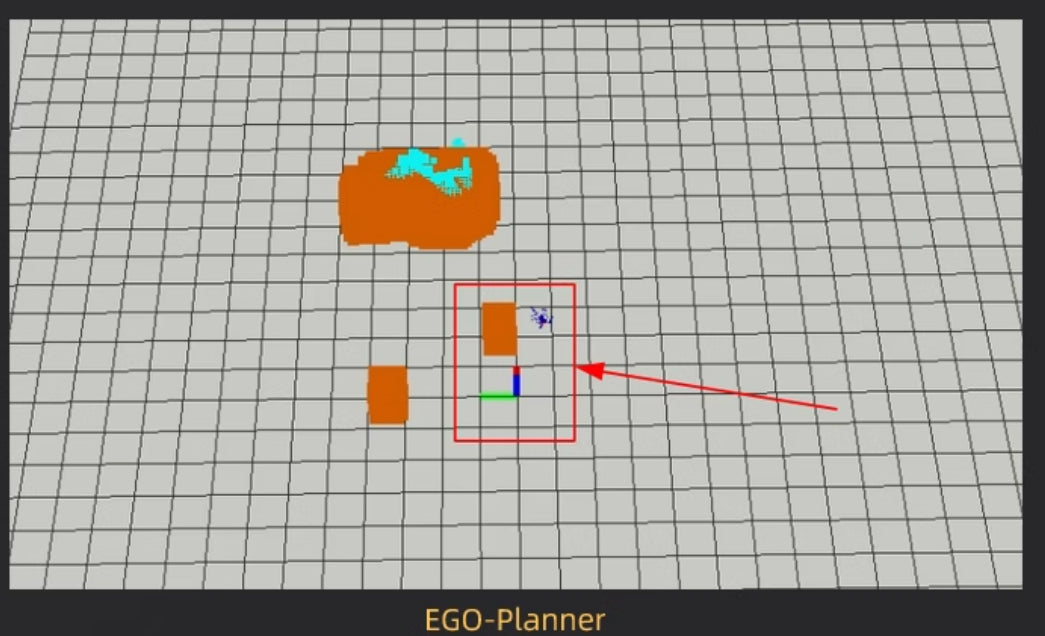
EGO-Planner
Ondersteunt de EGO-Planner padplanningsalgoritme en biedt Octomap-mappingalgoritmeIn combinatie met het professionele grondstation maakt het autonome 3D-dynamische padplanning mogelijk.
Stabiele en betrouwbare dronebesturingstoepassingen
De P600 drone is uitgerust met zeer nauwkeurige RTK-apparatuur, waarmee u buiten zeer nauwkeurig kunt zweven met een horizontale precisie tot 1 cm en een verticale precisie tot 1,5 cm. Gecombineerd met de Prometheus software systeem besturingsmodulemaakt nauwkeurige dronebesturing mogelijk.
De drone-besturingsmodule fungeert als een "brug" tussen softwareprogramma's en de drone, en biedt meerdere besturingsstatussen zoals initiële positie zweven, huidige positie zweven, landen en beweging. Deze omvatten zes besturingsmodi: gebruikelijke systeempositie, snelheid, geïntegreerde controle van positie en snelheid en trajectcontrolemodus. In totaal biedt het zeven besturingsmodi.

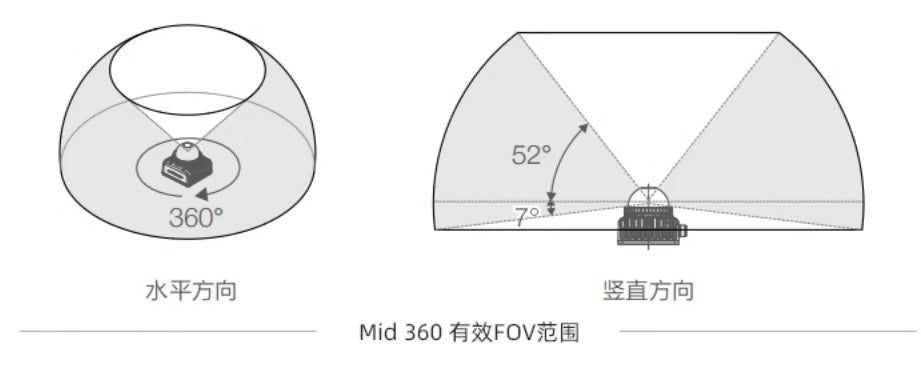
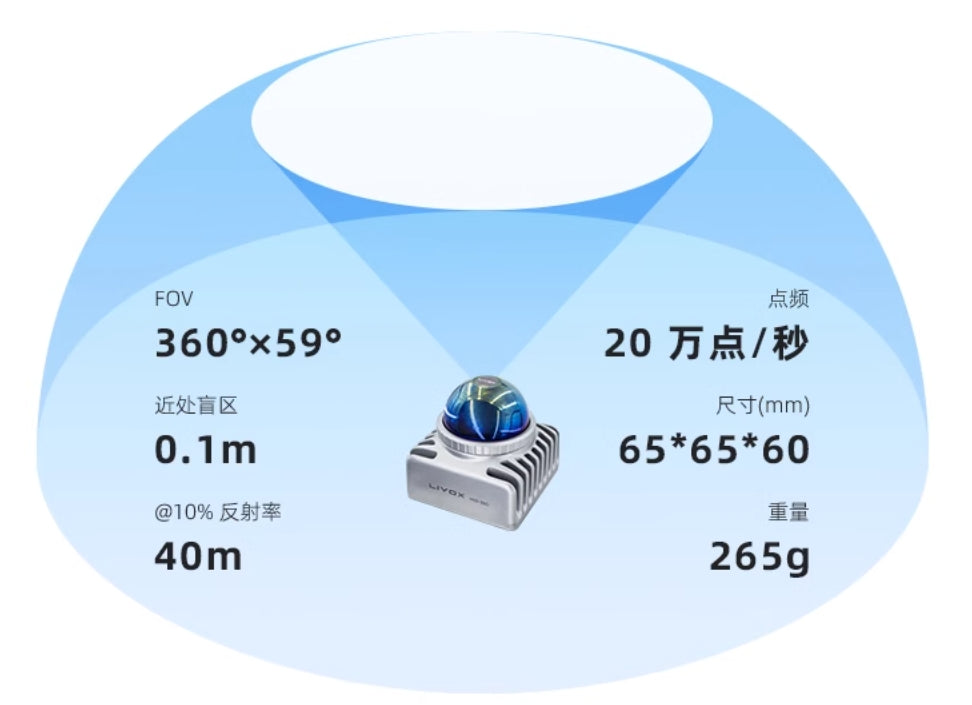
3D LiDAR Midden-360
- Lage blinde zone | Breed gezichtsveld | Toepassing in meerdere scenario's
De Midden 360 beschikt over een 360° horizontaal gezichtsveld en een maximaal verticaal gezichtsveld van 59°Wanneer de reflectiviteit van het doelobject 10% bedraagt, kan het maximale detectiebereik 40 meter, en het bereik van de blinde zone is zo klein als 10 meterHet past zich aan verschillende complexe omgevingen aan, zoals weinig licht en sterk licht.
Uitgerust met de Mid-360-module, de P600-drone bereikt een panoramische dekking van de blinde zone, waardoor een naadloze werking van drones in omgevingen met meerdere scenario's wordt gegarandeerd.
- Diagrambeschrijvingen:
- Horizontale richting: 360°
- Verticale richting: maximaal gezichtsveld van 52°

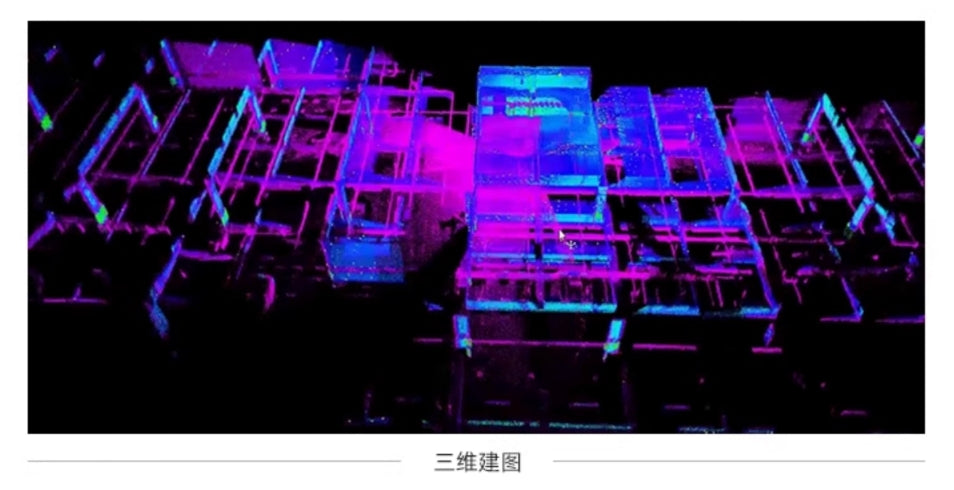
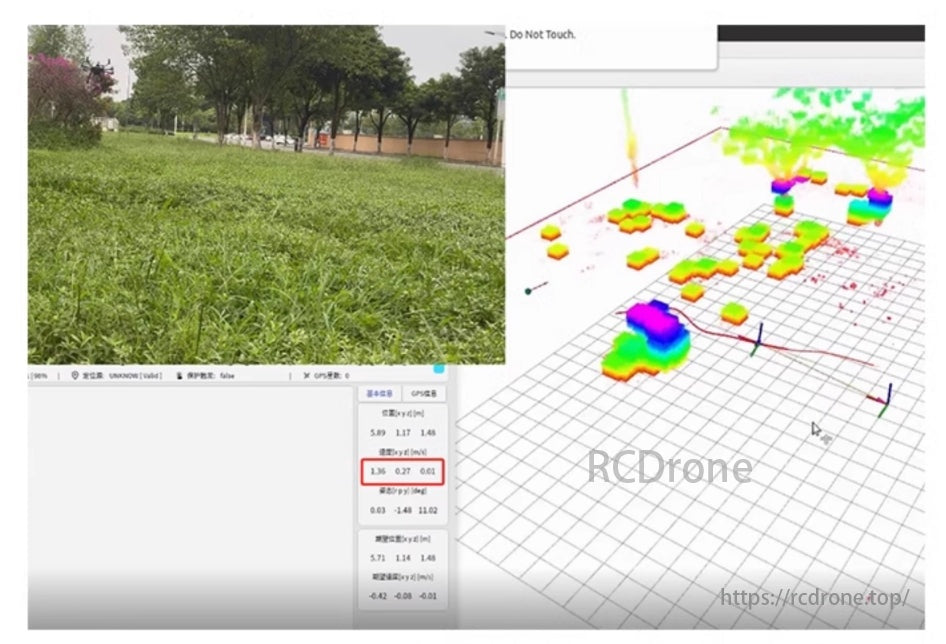
Snelle en nauwkeurige 3D-omgevingskartering
De P600-drone is uitgerust met geavanceerde omgevingssensoren, waardoor het tijdens de vlucht snel omgevingsgegevens kan verzamelen. Deze gegevens worden in realtime verwerkt om een 3D-milieukaart, die nauwkeurige ruimtelijke inzichten en navigatieondersteuning biedt voor diverse taken.
EGO-zwermpadplanning voor navigatie en obstakelvermijding
De Midden360 publiceert puntwolkgegevens en locatiegegevens, gecombineerd met de EGO-Swarm padplanningsalgoritme, wat het vermogen van de drone om zich autonoom aan te passen aan dynamische omgevingsveranderingen aanzienlijk verbetert. Het kan obstakels tijdens de beweging in realtime analyseren en erop reageren en het trackingdoel dynamisch aanpassen met een maximale snelheid van 2 m/sDit zorgt voor uitzonderlijke flexibiliteit en aanpasbaarheid in onbekende en complexe operationele scenario's.
Deze functie verbetert de taakefficiëntie van de drone aanzienlijk, waardoor deze efficiënt en nauwkeurig verschillende taken kan uitvoeren
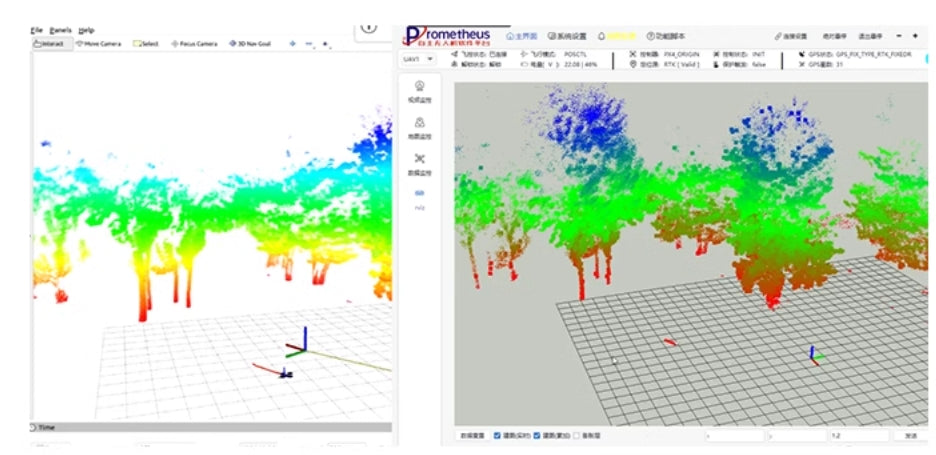
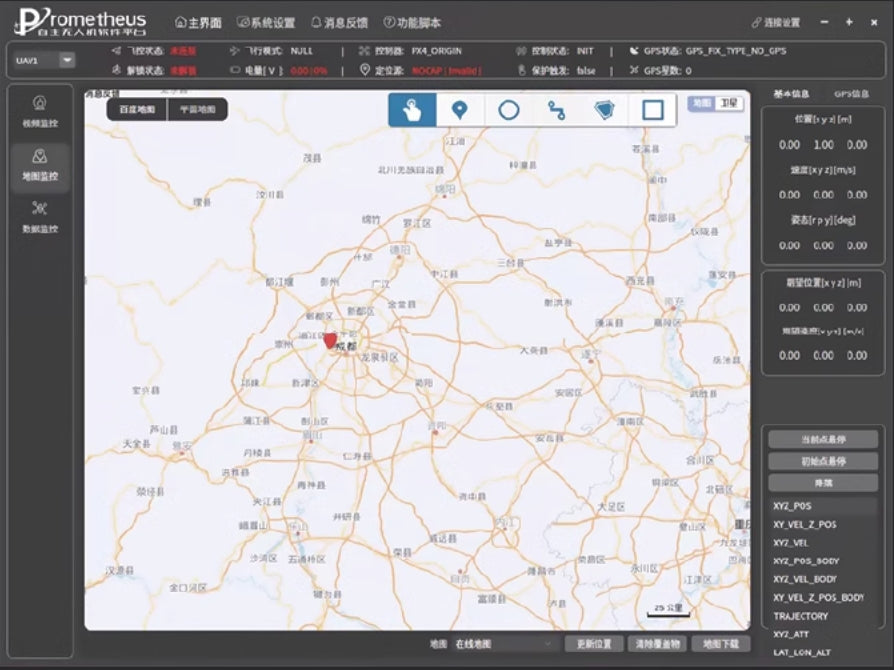
Prometheus Professional Grondstation Drone Interactie
- Interactie met grondstation
Dit toont de interface- en interactiemogelijkheden van de Prometheus professioneel grondstation, waardoor naadloze communicatie en bediening met de drone mogelijk is via 3D-omgevingskaarten.
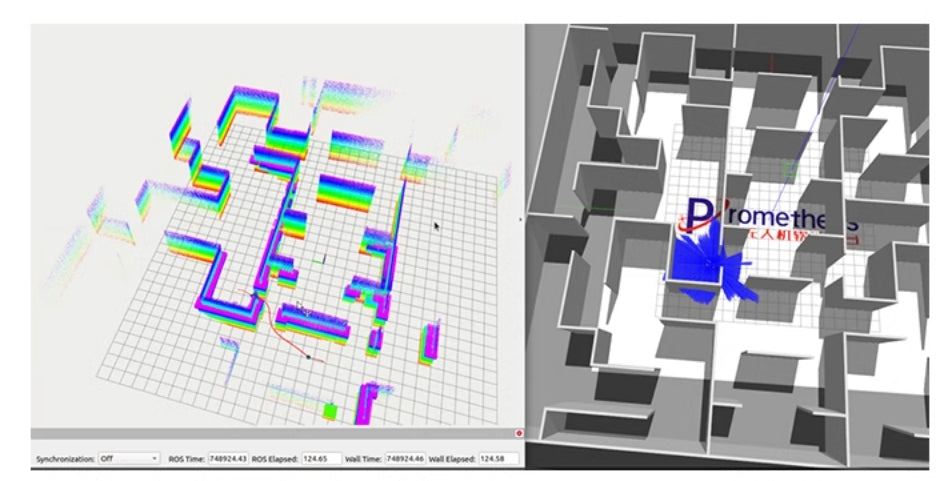
Geïntegreerde simulatiefunctie demo
- Gesimuleerde 3D LiDAR SLAM en EGO-Swarm padplanning
Dit illustreert de simulatie van 3D LiDAR-SLAM En EGO-Zwerm padplanning binnen een gestructureerde omgeving, waarbij de mogelijkheden van het systeem in een gecontroleerde demo worden gedemonstreerd.
Hardware-functies
Drone-frame
De Kedway DP1000 droneplatform van industriële kwaliteit maakt gebruik van een FOC (veldgerichte besturing) power system, waardoor de motor stabiel kan roteren, met weinig geluid, hoge efficiëntie en snelle dynamische respons. Het gehele dronesysteem bereikt een "ready-to-fly"-status met uitstekende hardwarekwaliteit, wat zorgt voor stabiele vliegprestaties. Het ondersteunt ultra-lange duur (70 minuten zonder lading), terwijl de P600-drone vereist ongeveer 24 minuten voor stabilisatie tijdens het positioneren.

Krachtige computereenheid
- Allspark Micro Edge Computing-eenheid, uitgerust met de NVIDIA Orin NX-module, voorzien van 100 TOPS drijvende-komma rekenkracht.
- Compact formaat, lichtgewicht, sterke systeemcompatibiliteit en GPU-versnelde high-performance computing.
- Vooraf geïnstalleerd met alle ontwikkelomgevingen, klaar voor gebruik, wat de secundaire ontwikkelingsefficiëntie verbetert.
- AfmetingenAfmetingen: 102,5 mm × 62.5mm × 31mm

Geïntegreerde beeldtransmissiecontroller
Een industriële drone-afstandsbediening combineert gegevens, beeld en controle in één.
- Frequentieband: 2,4-2,483 GHz
- Maximale transmissieafstand: 30 km
- Beeldkwaliteit: 1080P
- Levensduur van de batterij: 8-15 uur continu gebruik
Tijdens de vlucht met de drone kunnen gebruikers realtime drone-informatie bekijken, camerabeelden bekijken en tegelijkertijd de drone besturen met de joystick, waardoor de vlucht volledig visueel wordt weergegeven.

Dubbele antenne met hoge precisie RTK
De drone is uitgerust met een RTK-GNSS-positioneringsmodule, die gebruikmaakt van snelle carrier-phase differentiële positioneringstechnologie en multipath suppression-algoritmen om centimeter-level positioneringsnauwkeurigheid voor drones te bieden. Het kan gelijktijdig RTCM-gegevens ontvangen van meerdere grondgebaseerde referentiestations, en ondersteunt korte, middellange en lange basislijn RTK-berekeningen.
Met een ingebouwde meertalige Web-GUI, het maakt zero-threshold configuratie en gevisualiseerde data weergave en upgrade processen mogelijk. De ontvanger beschikt ook over een gebruiksvriendelijke webpagina configuratie interface, wat de operationele barrière aanzienlijk verlaagt. Het biedt rijke interfaces en is aanpasbaar aan verschillende toepassingsscenario's, wat uitzonderlijke prestaties levert in nauwkeurige positionering.

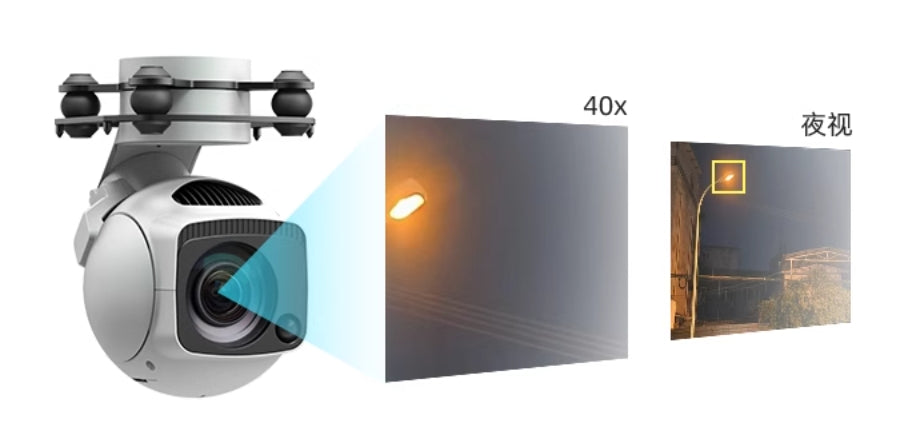
40x Optisch-elektronische Gimbal
Uitgerust met een zeer nauwkeurige 3-assige niet-orthogonale gimbal, beschikt het over een 8,29-megapixel 10x optische zoomcamera gecombineerd met digitale zoomtechnologie, die tot 40x vergroting bereikt. Het kan output 4K@30FPS video streams over het netwerk. Bovendien is het uitgerust met een laserbelichtingsmodule, waardoor zelfs in volledig donkere omgevingen heldere beelden mogelijk zijn.
MID 360 3D-LiDAR
De Mid-360 is een kosteneffectieve, veilige en betrouwbare laserdetectie- en afstandssensor. Hij wordt veel gebruikt in sectoren zoals logistieke robots, industriële robots en slimme steden, en ondersteunt functies zoals mapping, positionering, identificatie en obstakelvermijding. De Mid-360 kan objecten detecteren die zo dichtbij zijn als 0,1 meter en zo ver weg als 100 meter. Hij heeft een compact formaat, een breed gezichtsveld, een hoge resolutie, een hoge betrouwbaarheid en een geïntegreerde IMU.
Specificaties:
- Gezichtsveld: 360° × 59°
- Minimale detectieafstand: 0,1 miljoen
- Bereik (@10% reflectiviteit): 40 meter
- Puntfrequentie: 200.000 punten/seconde
- Afmetingen (mm): 65 × 65 × 60
- Gewicht: 265 gram
Softwarefuncties
Prometheus V2-softwaresysteem
Het ontwikkelingsplatform is gebaseerd op ROS en het Prometheus open-source framework, en biedt uitgebreide functionaliteiten en een groot aantal secundaire ontwikkelingsinterfaces voor efficiënte aanpassing. Het biedt interfaces voor UAV-status- en sensorgegevens, waaronder locatie-informatie, vluchtmodi, batterijstatus en IMU. Daarnaast biedt het besturingsinterfaces voor positie, snelheid, acceleratie en houding, evenals voorbeeldprogramma's voor gebruik van ontwikkelingsinterfaces. De UAV bevat ook ingebouwde functies voor inspectie van de vliegveiligheid (geen obstakelvermijding), waardoor automatisch landen in abnormale situaties mogelijk is om crashrisico's te verminderen, waardoor ontwikkeling veiliger wordt.

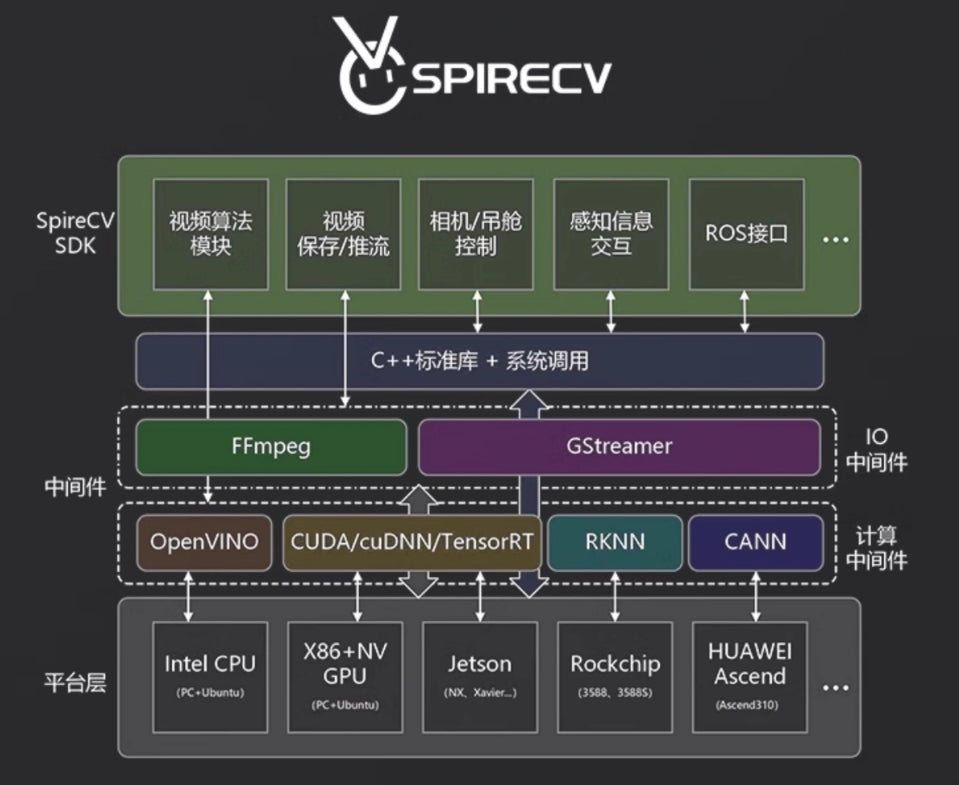
SpireCV Vision-bibliotheek
Gebaseerd op de SpireCV vision library, is dit een onboard image real-time processing SDK die speciaal is ontworpen voor intelligente onbemande systemen. De belangrijkste functies zijn onder andere gimbal/camera-besturing, video-opslag, streaming, doeldetectie, herkenning en tracking. Het is bedoeld om ontwikkelaars van intelligente onbemande systemen te voorzien van hoogwaardige, zeer betrouwbare, eenvoudige en feature-rijke vision processing-mogelijkheden. Dit model ondersteunt YOLO-training voor point-and-click voertuigtrackingfunctionaliteit.
Prometheus Grondstation Systeem
Het Prometheus grondstation is een mens-machine interface die is ontwikkeld met Qt, gebaseerd op het Prometheus systeem. Het gebruikt TCP/UDP communicatie om de configuratie van multi-machine communicatie te vereenvoudigen. Het grondstation stelt gebruikers in staat om snel verschillende functies van het Prometheus systeem te repliceren, wat real-time monitoring van UAV status biedt, evenals functies zoals one-click takeoff, landing en position control command operations.
Toepassingen
-
Wetenschappelijk onderzoek en AI-ontwikkeling
- AI-algoritme testen
- Geavanceerde sensordata-analyse
- Realtime beeldverwerking en -tracking
-
Industriële toepassingen
- Precieze kartering en navigatie in complexe omgevingen
- Obstakeldetectie en -vermijding in logistiek en warehousing
- Inspectie van infrastructuur zoals elektriciteitsleidingen en pijpleidingen
-
Academisch en educatief gebruik
- Secundaire programmering voor ROS-gebaseerd AI-onderzoek
- Laboratoriumdemonstraties en experimenten
- Opleiding in autonome dronenavigatie
-
Slimme stadsoplossingen
- 3D ruimtelijke reconstructie voor stedenbouw
- Verkeersbewaking en -beheer
- Toezicht en milieuanalyse
-
Aangepaste ontwikkeling
- Prototyping voor gespecialiseerde industriële toepassingen
- Testen en integratie van nieuwe hardware- en softwarecomponenten
-
Rampenbestrijding en milieumonitoring
- Luchtinspectie en -monitoring in door rampen getroffen gebieden
- Verzameling van milieugegevens voor onderzoek en beleidsvorming
De P600 biedt ongeëvenaarde flexibiliteit en functionaliteit, waardoor onderzoekers, technici en ontwikkelaars complexe projecten in uiteenlopende scenario's kunnen uitvoeren.
Related Collections







