-
CUAV V5 + Placa Transportadora Piloto Automático Pixhawk Controlador de Vôo - FPV RC Drone Quadcopter Helicóptero VTOL
Preço normal $192.64 USDPreço normalPreço unitário por -
CUAV NOVO controlador de vôo de piloto automático V5 + - baseado em hardware de código aberto FMU V5 para FPV RC Drone Quadcopter Helicóptero Pixhawk
Preço normal A partir de $554.59 USDPreço normalPreço unitário por -
CUAV V5+/X7+ Placa Base Controlador de Voo, Pixhawk FMU v5, STM32F765, PX4/ArduPilot
Preço normal A partir de $208.60 USDPreço normalPreço unitário por -
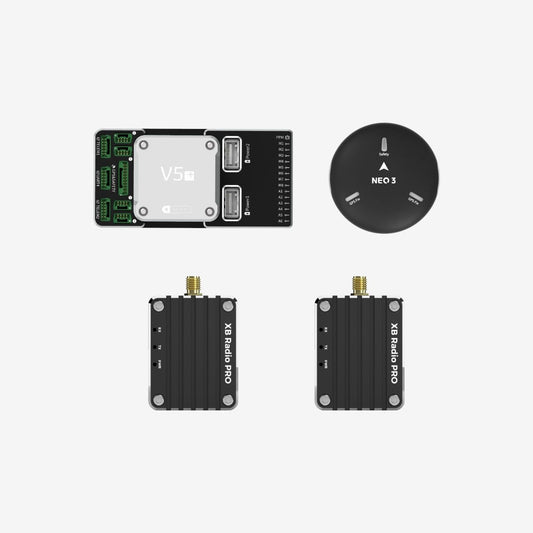
CUAV Novo Pacote Multi Rotor Copter Match - V5 + Controlador de Vôo de Piloto Automático NEO 3 GPS e Conjunto de Telemetria XBEE Pro
Preço normal $1,066.02 USDPreço normalPreço unitário por -
Dados de rádio CUAV P9 e drone Pixhawk Fpv V5 + controlador de vôo NEO 3 Pro GPS Telemetria Combo
Preço normal $1,645.35 USDPreço normalPreço unitário por -
CUAV Novo pacote de uma para múltiplas estrelas com V5 + Flight Flightcase RTK 9Ps GPS e kit combinado de telemetria de rádio P900
Preço normal $5,056.40 USDPreço normalPreço unitário por -
Cuav novo conjunto de kit um para múltiplo com controlador de vôo V5 + RTK 9Ps GPS P9 rádio telemetria GNSS
Preço normal $3,832.45 USDPreço normalPreço unitário por -
Cuav pixhawk drone fpv v5 + controlador de vôo neo 3 pro gps e tubo de velocidade aérea combinação de módulo skye
Preço normal $1,105.22 USDPreço normalPreço unitário por -
Cuav novo pixhack pixhawk v5 + piloto automático-fpv rc drone quadcopter helicóptero controlador de vôo e neo v2 3 pro gps combo
Preço normal A partir de $616.54 USDPreço normalPreço unitário por -
Cuav vtol rc drone pixhawk piloto automático v5 + pacote de placa transportadora principal com neo 3 gps e combinação de telemetria p9
Preço normal $1,869.14 USDPreço normalPreço unitário por -
Cuav pixhawk drone fpv v5 + controlador de vôo neo 3 pro gps e pode alimentar combinação de módulo pmu
Preço normal $1,057.20 USDPreço normalPreço unitário por -
CUAV CAN PDB Placa de transporte de piloto automático V5 + Plus Core - Controlador de voo RC Drone Pixhawk
Preço normal $826.81 USDPreço normalPreço unitário por -
Cuav novo drone uav fpv v5 + piloto automático pixhawk controlador de vôo com módulo lidar de radar tf luna
Preço normal $657.82 USDPreço normalPreço unitário por -
CUAV NOVO V5+ Design de Hardware Pixhack Pixhawk Piloto Automático Controle Remoto FPV RC Drone Quadcopter Helicóptero Transporte
Preço normal $408.00 USDPreço normalPreço unitário por