Placa Recetora RTK GNSS ZED-F9P-01B-01, USB-C, UART2 RTCM3, SMA & U.FL Antena, Pixhawk GH1.25-6P
Placa Recetora RTK GNSS ZED-F9P-01B-01, USB-C, UART2 RTCM3, SMA & U.FL Antena, Pixhawk GH1.25-6P
RCDrone
Não foi possível carregar a disponibilidade de recolha
Visão Geral
Esta placa de receptor GNSS é baseada no módulo u-blox ZED-F9P-01B-01 e fornece suporte para posicionamento diferencial RTK com USB-C, pinos UART/SPI e opções de conector de antena dupla para integração em sistemas de robótica, piloto automático e navegação.
Principais Características
- Interface USB: Conexão USB Tipo-C para configuração com u-center e visualização rápida de sentenças NMEA; é enumerada como uma porta COM serial independente da interface UART.
- Opções de alimentação: Regulador de 3.3V a bordo converte 5V USB para 3.3V necessário pelo módulo; suporta entrada externa de 5V ou alimentação direta de 3.3V.
- Recomendação de 3.3V de baixo ruído: Ao fornecer 3.3V diretamente, recomenda-se uma fonte limpa com ruído mínimo (menos de 50mV de ondulação PVP é considerado ideal para posicionamento preciso).
- Compartilhamento UART/SPI: Pinos seriais clássicos estão disponíveis, mas compartilhados com pinos SPI; por padrão, os pinos UART estão ativados. O jumper DSEL na parte de trás da placa deve estar aberto.
- Tratamento RTCM3 no UART2: Uma segunda porta serial (UART2) é utilizada principalmente para dados de correção RTCM3; por padrão, recebe e analisa automaticamente o RTCM3 recebido para ativar o modo RTK. No modo de estação base, o UART2 emite dados de correção RTCM3.
- Conector do autopiloto: GH1.25-6P (padrão Pixhawk JST-GH) para conectar a um autopiloto Pixhawk e/ou alimentar a placa.
- Conectores de antena: Duas interfaces de antena são fornecidas: SMA (parafuso externo, orifício interno) e U.FL (IPEX); qualquer uma pode ser utilizada.
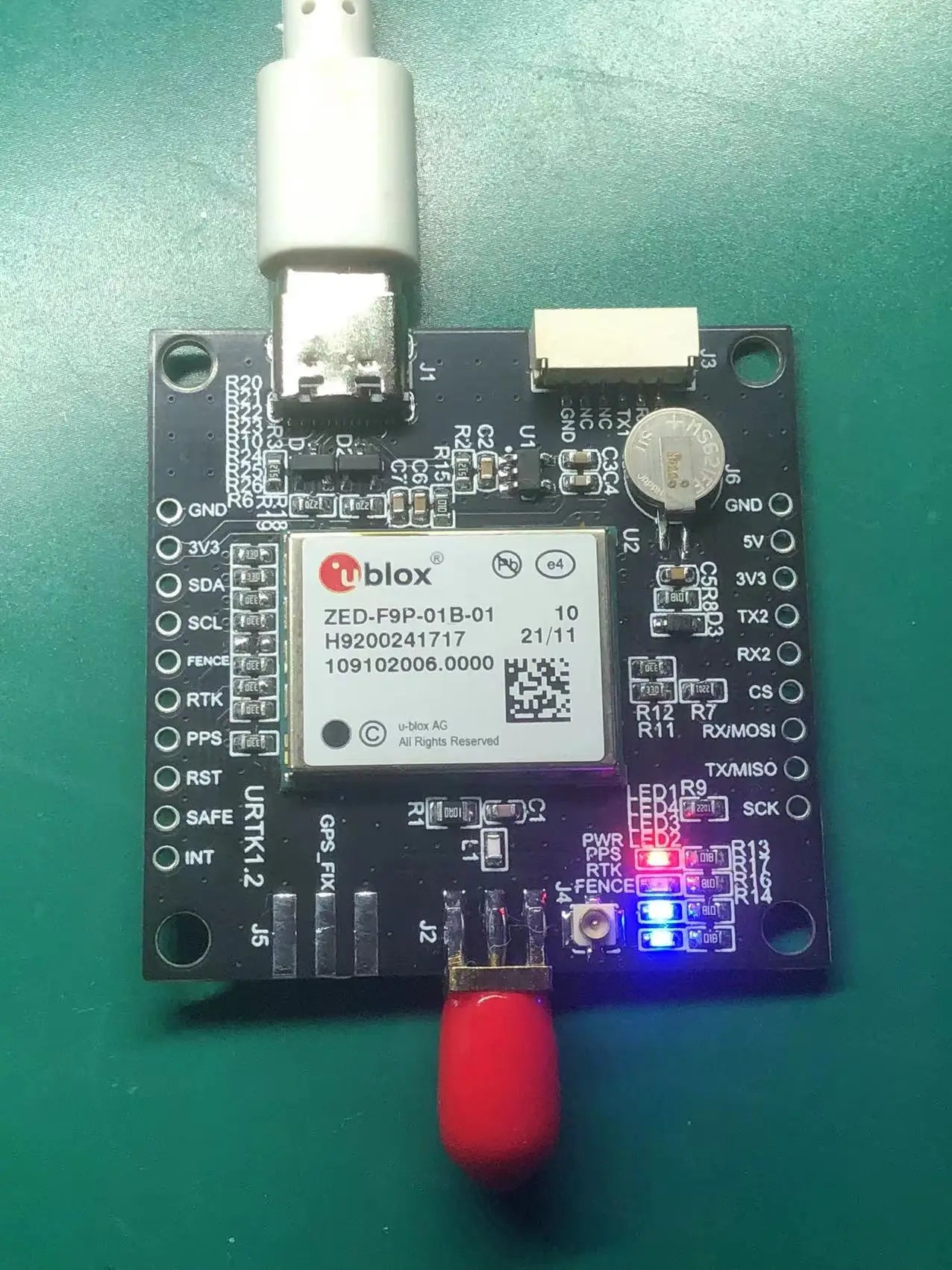
- LEDs de status: Quatro LEDs de status (Power, PPS, RTK, FENCE) para indicação do sistema/RTK/geofencing.
Especificações
| Módulo GNSS (rótulo do módulo) | u-blox ZED-F9P-01B-01 |
| Marcação da placa (visível na foto da placa) | ZED-F9P-01B-00 |
| USB | USB Tipo-C; enumera como porta COM serial (independente de UART) |
| Serial / SPI | Pinos UART compartilhados com pinos SPI; UART ativado por padrão; jumper DSEL na parte de trás deve estar aberto |
| Direção do pino UART (compartilhado com SPI) | TX/MISO = saída do ZED-F9P; RX/MOSI = RX para o ZED-F9P |
| Segundo porta serial | UART2 (principalmente para dados de correção RTCM3; pode emitir RTCM3 em modo de estação base) |
| Regulação de potência | Regulador de 3.3V fornecido para regular 5V USB para 3.3V requerido pelo módulo |
| Opções de entrada de energia (declaradas) | USB 5V, externo 5V, ou alimentação direta de 3.3V |
| Nota sobre o ruído da fonte de 3.3V (declarada) | Menos de 50mV de ondulação PVP é declarado como ideal ao fornecer 3.3V diretamente |
| Capacidade do regulador de 3.3V (declarada) | 600mA da entrada de 5V |
| Capacidade de energia USB-C (declarada) | Capaz de fornecer 2A |
| Porta J3 | GH1.25-6P (padrão Pixhawk JST-GH) |
| Pinagem J3 (padrão Pixhawk) | 1: 5V_IN; 2: ZED-F9P UART1 recebendo (nível 3.3V); 3: ZED-F9P UART1 TX (nível 3.3V); 4,5: Não conectado; 6: Terra |
| Indicadores LED (descrito) | Energia (vermelho quando 3.3V ativo via USB ou bus Qwiic); PPS (amarelo, uma vez por segundo após o bloqueio de posição); RTK (azul: ligado após a alimentação, pisca após receber dados RTCM, desliga após a correção RTK); FENCE (configurável para aplicações de geofencing) |
| Interfaces de antena | SMA e U.FL (IPEX); qualquer interface é aceitável |
| Rótulos de cabeçalho (serigrafia, lado esquerdo) | GND, 3V3, SDA, SCL, FENCE, RTK, PPS, RST, SAFE, INT |
| Rótulos de cabeçalho (serigrafia, lado direito) | GND, 5V, 3V3, TX2, RX2, CS, RX/MOSI, TX/MISO, SCK |
Aplicações
- Posicionamento RTK GNSS para drones, UGVs, robótica e protótipos de navegação
- Integração GNSS Pixhawk/autopilot via JST-GH (GH1.25-6P) conexão serial
- Configurações RTK baseadas em RTCM3 usando UART2 para links de dados de correção (rádio ou com fio)
Para questões de compatibilidade (seleção de UART/SPI, fiação RTCM3, antenas ou integração), entre em contato com o suporte em https://rcdrone.top/ ou envie um e-mail para [email protected].
Detalhes

A placa do receptor ZED-F9P combina uma conexão USB-C com pinos de I/O claramente rotulados e um U.FL conector de antena para uma integração simples.
A interface USB‑C conecta o ZED‑F9P ao u‑center ou a um Raspberry Pi como uma porta COM serial independente, com regulação de 3.3V a partir de energia USB de 5V.
A placa ZED-F9P utiliza pinos UART/SPI compartilhados e uma segunda porta serial (UART2) que é comumente usada para dados de correção RTCM3 para habilitar o modo RTK.
O pinout do conector J3 GH1.25-6P Pixhawk lista 5V_IN, UART1 RX/TX (3.3V nível), e terra, e a placa utiliza quatro LEDs de status para alimentação, bloqueio de PPS e atividade RTK/RTCM.
A placa do receptor GNSS RTK ZED-F9P oferece duas opções de interface de antena—SMA e U.FL (IPEX)—para instalação flexível.
Related Collections