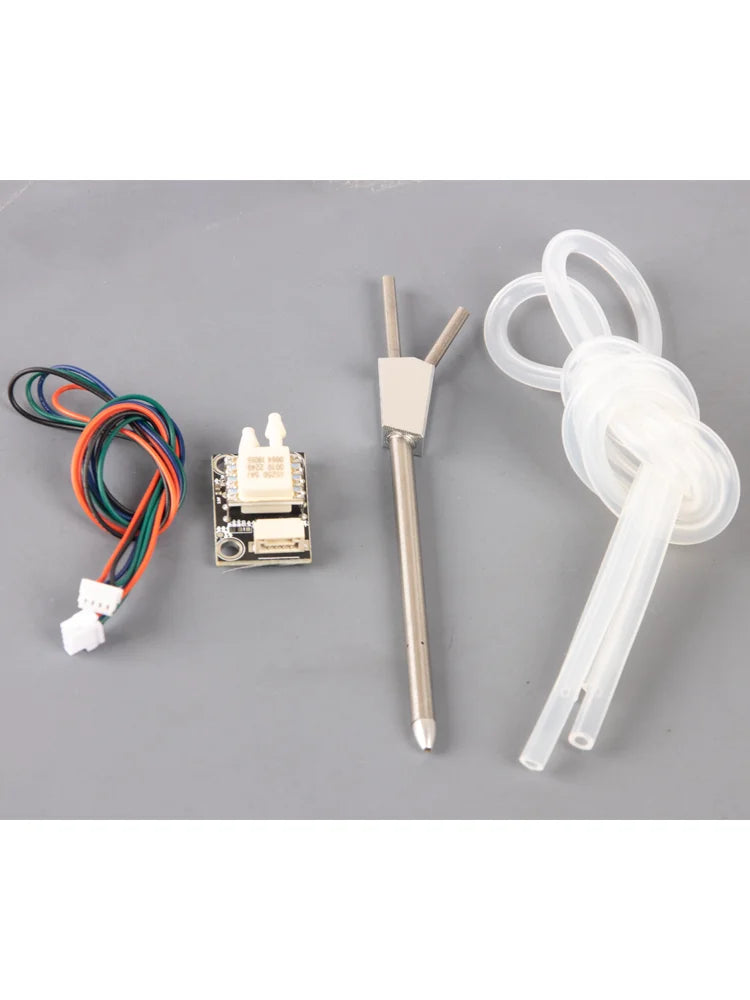
Ardupilot arduplane pitot medidor digital de velocidade do ar/medidor de velocidade do ar tubo sensor para hex pixhawk2/cuav v5 pixhawk px4 controle de vôo
Ardupilot arduplane pitot medidor digital de velocidade do ar/medidor de velocidade do ar tubo sensor para hex pixhawk2/cuav v5 pixhawk px4 controle de vôo
RCDrone
Preço normal
$52.81 USD
Preço normal
Preço de saldo
$52.81 USD
Preço unitário
por
Impostos incluídos.
Envio calculado na finalização da compra.
Não foi possível carregar a disponibilidade de recolha
ESPECIFICAÇÕES
Marca: VOADOR
Origem: China continental
Material: Material Composto
Idade Recomendada: 12+ anos
Peças e acessórios RC: Componentes do motor
Para tipo de veículo: Aviões
Usar: Veículos e brinquedos de controle remoto
Atualizar peças/acessórios: Car Shell
Periféricos/dispositivos de controle remoto: Controle remoto
Suprimentos de ferramentas: Bateria
Parâmetros técnicos: Valor 2
Número do modelo: Módulo de energia Crius
Atributos de tração nas quatro rodas: pneus







Related Collections