

















SteadyWin GIM3505-8 Motor de Redução Planetária Integrado — Módulo de Junta para Robô Quadrúpede, 8:1, 24V, CAN, IP54
SteadyWin GIM3505-8 Motor de Redução Planetária Integrado — Módulo de Junta para Robô Quadrúpede, 8:1, 24V, CAN, IP54
SteadyWin
Preço normal
$80.00 USD
Preço normal
$90.00 USD
Preço de saldo
$80.00 USD
Preço unitário
por
Impostos incluídos.
Envio calculado na finalização da compra.
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O módulo de junta de robô quadrúpede SteadyWin GIM3505-8 com motor de redução planetária embutido foi projetado para juntas robóticas compactas e conjuntos de atuadores. O GIM3505-8 integra um redutor planetário 8:1 com um motor sem escovas e opções de driver a bordo para fornecer movimento controlado para robôs quadrúpedes, braços robóticos, juntas humanoides e sistemas mecatrónicos semelhantes.
Principais Características
- Sistema de engrenagem planetária avançado para baixo retrocesso e movimento suave (retrocesso da engrenagem: 15 arcmin).
- Ampla adaptabilidade de tensão: tensão nominal de 24 V com uma faixa de operação de 12~48 V.
- Alta densidade de torque e eficiência: constante de torque 0.52 N·m/A com torque nominal de 0.65 N·m e torque de pico de 1.27 N·m.
- Dimensões compactas: Ø43 × 23.6 mm (sem driver); Ø43 × 30 mm (com driver).
- Proteções de segurança integradas: sobretemperatura, sobretensão e sobrecarga (proteção em três camadas conforme indicado na literatura do produto).
- Interface de comunicação CAN; suporta encoder separado e travão personalizado opcional.
Especificações
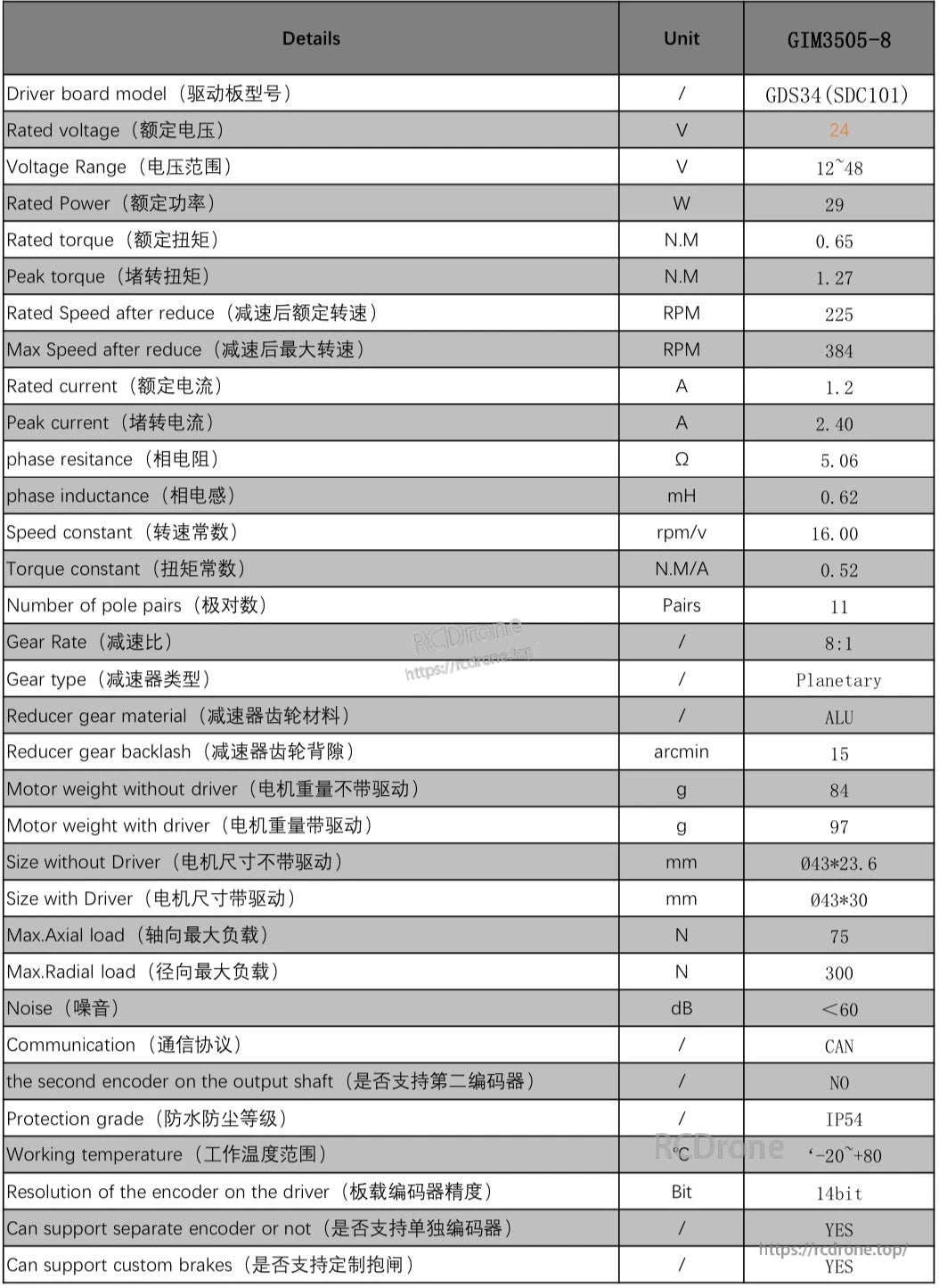
Parâmetro Valor ---------------------------------------- -------------------------- Modelo GIM3505-8 Modelo da placa do driver GDS34 (SDC101) Tensão nominal 24 V Faixa de tensão 12~48 V Potência nominal 29 W Torque nominal 0.65 N·m Torque de pico (bloqueio) 1.27 N·m Velocidade nominal após redução 225 RPM Velocidade máxima após redução 384 RPM Corrente nominal 1.2 A Corrente de pico (bloqueio) 2.4 A Resistência de fase 5.06 Ω Indutância de fase 0.62 mH Constante de velocidade 16 rpm/V Constante de torque 0.52 N·m/A Número de pares de polos 11 Pares Relação de engrenagem 8:1 Tipo de engrenagem Planetária Material da engrenagem redutora ALU Folga da engrenagem redutora 15 arcmin Peso do motor (sem driver) 84 g Peso do motor (com driver) 97 g Tamanho (sem driver) Ø43*23.6 mm Tamanho (com motor) Ø43*30 mm Carga axial máxima 75 N Carga radial máxima 300 N Ruído <60 dB Comunicação CAN Segundo encoder no eixo de saída NÃO Grau de proteção IP54 Temperatura de operação -20°C a +80°C Resolução do encoder no motor 14 Bit Suporte de encoder separado SIM Suporte de travão personalizado SIM
Aplicações
- Robôs quadrúpedes (juntas e atuadores das pernas)
- Juntas de robôs humanoides
- Braços robóticos e manipuladores
- Atuadores de exoesqueletos
- Módulos de direção e articulação AGV/AMR
- Projetos de robótica autónoma em universidades e investigação
Para atendimento ao cliente e consultas técnicas, contacte [email protected].
Manuais
Detalhes


SteadyWin Especificações da junta GIM3505-8: 24V, 29W, torque de 0.65N.M, engrenagem planetária, comunicação CAN, classificação IP54, suporta travões personalizados e encoders separados, opera de -20°C a +80°C.
Related Collections

















