




CEREBOTO OpenArm Kit de Braço Robótico 7DOF – DIY ou Pré-Montado, Controlo Open-Source ROS/Python
CEREBOTO OpenArm Kit de Braço Robótico 7DOF – DIY ou Pré-Montado, Controlo Open-Source ROS/Python
CEREBOTO
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O Braço Robótico CEREBOTO OpenArm 7DOF é um braço robótico de grau de pesquisa, em escala humana, projetado para universidades, laboratórios, startups e makers sérios. Com 7 graus de liberdade, alcance do braço de 633 mm, carga útil típica de 4,1 kg e carga útil máxima de 6,0 kg por braço, o OpenArm oferece movimento de alta precisão, interação física segura e ferramentas ricas de código aberto.
Você pode escolher um kit de hardware DIY para montagem completa, ou um braço acabado, calibrado de fábrica e pronto para uso. Estão disponíveis configurações de braço único, braço duplo e braço quádruplo.
Principais Características
-
Braço robótico em escala humana 7DOF – projetado para corresponder a um comprimento de braço humano de 160–165 cm para manipulação natural e teleoperação.
-
Carga útil alta &e estabilidade – carga útil típica de 4,1 kg, carga útil máxima de 6,0 kg por braço, com peso leve do braço de 5,5 kg.
-
Motores acionáveis &e estrutura flexível – interação segura e suave para colaboração humano-robô e tarefas controladas por força.
-
Loop de controlo CAN-FD a 1 kHz – controlo em tempo real, de baixa latência para aplicações de pesquisa de alto desempenho e de grau industrial.
-
Construção totalmente em metal – estrutura principal robusta em liga de alumínio e aço inoxidável para rigidez e durabilidade.
-
Hardware &e software de código aberto – CAD, PCB, firmware e software de controlo abertos para personalização profunda.
-
Suporte a ROS, Python e C++ – integração oficial do ROS mais APIs Python/C++ para desenvolvimento rápido de algoritmos.
-
Ecosistema rico e expansão – suporta mãos robóticas ágeis, luvas de captura de movimento e bases móveis para plataformas robóticas completas.
Especificações Técnicas
-
Graus de Liberdade: 7 DOF por braço
-
Alcance do Braço: 633 mm
-
Carga Útil Típica: 4.1 kg
-
Carga Útil Máxima: 6.0 kg por braço
-
Peso do Braço: aprox. 5.5 kg por braço
-
Materiais: Partes estruturais em liga de alumínio e aço inoxidável
-
Interface de Controle: CAN / CAN-FD, UART (via adaptador USB2CANFD-X2 incluído nas versões de braço duplo/quádruplo)
-
Frequência de Controle: até 1 kHz em loop CAN-FD
-
Suporte de Software: framework ROS, API Python, API C++
-
Ergonomia: comprimento do braço adequado para utilizadores com altura corporal de 160–165 cm
Software &e Ecossistema Open-Source
OpenArm é uma plataforma de braço robótico totalmente open-source.Os recursos oficiais incluem:
-
Website: openarm.dev
-
Documentação: docs.openarm.dev
-
GitHub: github.com/enactic/openarm
-
Vídeo Tutorial: guia oficial do YouTube para começar
Com arquivos abertos de CAD, PCB e firmware, você pode modificar mecânica, eletrônica e software de controle, ou estender o braço com novos sensores e efetores finais para os seus próprios tópicos de pesquisa.
Cenários de Aplicação Típicos
OpenArm foi concebido como uma plataforma de pesquisa e ensino versátil e de alta precisão para:
-
Cursos de robótica universitária e experiências de laboratório
-
Institutos de pesquisa e projetos de laboratório
-
Pesquisa em aprendizagem por reforço e IA baseada em física
-
Interação humano-robô e estudos de robôs colaborativos
-
Espaços Maker e equipas de hardware de código aberto
-
Educação em engenharia e plataformas de formação
Com o seu tamanho em escala humana e atuação flexível, o OpenArm é ideal para manipulação, teleoperação, aprendizagem por imitação, robótica assistiva e muito mais.
Versões de Produto &e Configurações
Versão 1 – Kit de Hardware DIY
-
Para utilizadores com fortes habilidades práticas que desejam compreender profundamente a estrutura mecânica.
-
Inclui todas as peças mecânicas, elétricas e impressas em 3D; você monta e calibra o braço você mesmo seguindo o manual.
Versão 2 – Braço Robótico Acabado
-
Para institutos de pesquisa, laboratórios, empresas e educadores que precisam de uma plataforma plug-and-play.
-
Completamente montado, ajustado e calibrado antes do envio; pronto a usar assim que sai da caixa.
Configurações de braços disponíveis (dependendo da listagem):
-
Kit DIY – Braço Único
-
Braço Finalizado – Braço Único
-
Kit DIY – Braços Duplos
-
Braços Finalizados – Braços Duplos
-
Kit DIY – Braços Quádruplos
-
Braços Finalizados – Braços Quádruplos
Conteúdo da Embalagem
Cada kit OpenArm ou sistema finalizado inclui tipicamente:
-
Componentes estruturais principais em liga de alumínio e aço inoxidável
-
Motores, placas de driver, fonte de alimentação e cabos
-
Peças impressas em 3D e conjuntos de parafusos
Versões de braço duplo e braço quádruplo: um dispositivo USB2CANFD-X2 compatível com BOM oficial (CEREBOTO é o agente autorizado no país) para comunicação PC-CAN-FD.
Extensões de Hardware Suportadas
OpenArm suporta múltiplos complementos de hardware (vendidos separadamente), permitindo que você construa um sistema robótico completo:
-
Mão robótica dexterosa – para pesquisa em manipulação fina e apreensão.
-
Conjunto de luvas de captura de movimento – para teleoperação intuitiva e aprendizagem por imitação.
-
Base móvel – para transformar o OpenArm em uma plataforma manipuladora móvel.
Perguntas Frequentes
P: O braço robótico pode ser usado imediatamente?
R: A versão do braço acabado está totalmente ajustada e calibrada na fábrica—basta ligá-lo e começar a trabalhar. O kit de hardware DIY requer que você monte e configure o sistema seguindo as instruções.
P: O OpenArm é compatível com ROS ou outros middleware?
R: Sim. O OpenArm suporta oficialmente o framework ROS, e você também pode controlar o braço através de APIs em Python e C++.
P: Para quem é este produto?
R: Pesquisadores de universidades e institutos, laboratórios de IA &e robótica, cursos de ensino, centros de formação em engenharia e entusiastas avançados.
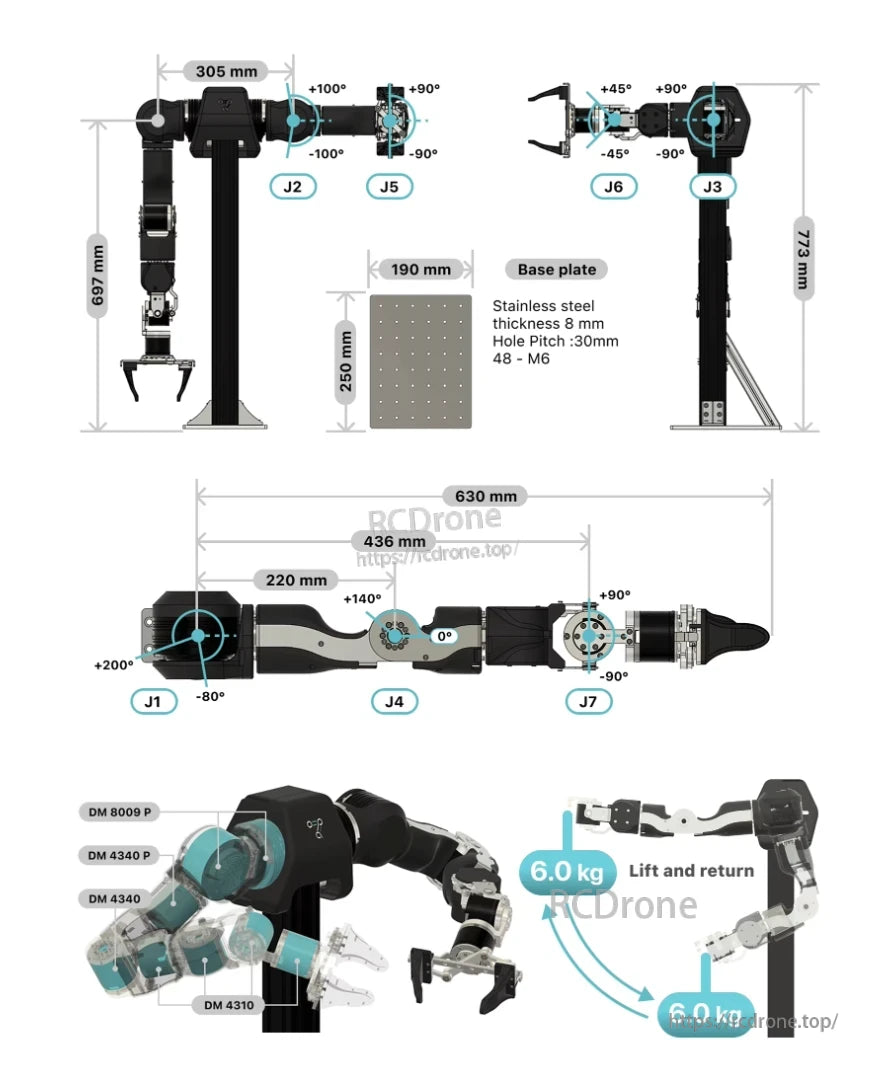
O braço robótico Cereboto OpenArm 7DOF possui sete articulações (J1–J7) com intervalos angulares definidos. Tem uma altura de 697 mm ou 773 mm, alcança 630 mm e monta-se numa placa base de aço inoxidável de 190×250 mm—8 mm de espessura com 48 furos M6 espaçados a 30 mm. Movido por motores DM8009P, DM4340P, DM4340 e DM4310, suporta cargas úteis de 6,0 kg com precisão. Projetado para uso industrial e de pesquisa, equilibra robustez estrutural com controle de movimento preciso.

Related Collections



