






Controlador de Drone CUAV Pixhawk V6X V2 para PX4 ArduPilot, STM32H753IIK6, RM3100, Ethernet 100Mbps
Controlador de Drone CUAV Pixhawk V6X V2 para PX4 ArduPilot, STM32H753IIK6, RM3100, Ethernet 100Mbps
CUAV
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O CUAV Pixhawk V6X V2 é um controlador de drone da série Pixhawk projetado para firmware de piloto automático PX4 e ArduPilot. Segue o padrão FMU v6x da Pixhawk e a filosofia de design modular, apresentando sensores redundantes de grau industrial atualizados, um relógio externo de temperatura constante e um design de dissipação de calor do MCU, com comutação de nível PWM de 5V/3.3V e uma estrutura de absorção de choque patenteada. O módulo de gestão de energia PMU 2 Lite padrão suporta 70V de entrada e 220A de detecção de corrente.
Principais Características
- Unidade de ponto flutuante de dupla precisão H7 (STM32H753IIK6); unidade de ponto flutuante de dupla precisão de 480MHz; 2M de memória Flash
- Matriz IMU industrial de tripla redundância dissimilar com design de barramento e fonte de alimentação independentes (IIM-42652, BMI088, ICM-45686)
- Barómetro combinado de dupla redundância (BMP581, ICP-20100)
- Sistema de absorção de choque central com absorção de choque em três eixos (X, Y, Z); design de suporte em quatro cantos inclinado; novo tipo de material absorvente de choque
- Compasso magnético RM3100 de grau automotivo para rejeição robusta de interferências magnéticas
- Compensação de relógio de cristal externo IMU (usado com relógio externo de temperatura constante de alta precisão para reduzir erros de ODR e melhorar a sensibilidade e sincronização)
- Sistema de controle de temperatura constante: silicone condutor térmico e compensação de temperatura IMU para reduzir a deriva relacionada com a temperatura
- Software flexível que alterna entre 5V e 3.3V níveis de saída PWM
- Interface Ethernet integrada de 100 Mbps para sincronização de dados de alta velocidade com dispositivos como computadores de missão e câmaras de levantamento
- Suporta arranque seguro e serviços de atualização de firmware seguro
- Design de fonte de alimentação multi-redundante; suporta entrada PMU CAN de 2 canais; inclui PMU 2 Lite como padrão
- Furos de montagem na parte inferior adicionados para montagem direta com parafusos; furos de montagem compatíveis com parafusos padrão M2
Especificações
| Processador | STM32H753IIK6 |
| Coprocessador | STM32F103 |
| Versão | Pixhawk V6XV2 |
| CPU / memória (declarada) | Unidade de ponto flutuante de precisão dupla de 480MHz; 2M memória Flash |
| Acelerómetro & giroscópio | IIM-42652; BMI088; ICM-45686 |
| Compasso | RM3100 |
| Barómetro | BMP581; ICP-20100 |
| PWM I/O | 16 |
| Nível PWM | 3.3V / 5V (comutação de software) |
| Potência | 2 (2 interfaces de alimentação CAN) |
| Porto GPS | 2 (GPS1: interface GPS com I2C e interruptor de segurança; GPS2: interface com I2C e GPS) |
| Porto TELEM | 3 |
| Bus CAN | 2 |
| PPM RC | 1 (entrada dedicada para receptor PPM) |
| SBUS/DSM/RSSI | 2 (1 entrada SBUS/DSM/Spektrum; 1 analógica 3.3V/PWM input) |
| Saídas SBUS | 1 |
| Depuração FMU | 1 |
| Depuração IO | 1 |
| Ethernet | 1 (100 Mbps) |
| SPI externo 1 | 1 (interface SP16 para expansão de sensores externos) |
| ADIO | 1 (AD3.3/ADC6.6) |
| UART4 | 1 |
| Porta USB | 2 (Tipo-C x1; interface GH x1 para conexão USB externa) |
| Cartão TF | 1 |
| Módulo de alimentação | PMU 2 Lite padrão (versão 5V), tensão de entrada: 12-70V |
| Tensão de operação | USB: 4.75-5.25V; PMU 2 Lite: 12-70V; Potência: 4.85-5.45V |
| Temperatura de operação | -20 a 85C |
| Tamanho | 45 x 85.1 x 29.2 mm |
| Peso | Controlador: 97.9g; Núcleo: 43.1g; Placa de suporte (incluindo parafusos): 54.8g |
| Nota de montagem (texto do diagrama) | Orifícios de montagem compatíveis com parafusos padrão M2; dimensões mostradas: 72 mm; 22.50 mm; 24 mm |
O que está incluído
- Pixhawk V6X V2 x1
- Módulo de Alimentação CAN PMU 2 Lite 5V x1
- Cabo de Alimentação PMU 2 Lite-5V Header (Versão X7+ (V6X)), comprimento do fio: 25cm x1
- Placa de Extensão CAN/I2C x1
- Cartão de Memória TF x1
- Cabo Tipo-C, comprimento do fio: 100cm x1
- Cabo DSM RC, comprimento do fio: 30cm x1
- Cabo SBUS RC, comprimento do fio: 30cm x1
- Cabo PPM RC/SBUS OUT, comprimento do fio: 30cm x1
- Cabo Ethernet, comprimento do fio: 40cm x1
- Cabo CAN, comprimento do fio: 30cm x1
- Cabo TELEM, comprimento do fio: 30cm x1
- Cabo UART 4, comprimento do fio: 30cm x1
- UART4 -> Cabo I2C, comprimento do fio: 30cm x1
- Cabo ADIO, comprimento do fio: 30cm x1
- Cabo de Depuração, comprimento do fio: 10cm x1
- Cabo de Extensão de Conector Fêmea Tipo-C USB, comprimento do fio: 50cm x1
- 3M Dupla Face x2
Aplicações
- Compatível com ArduPilot e PX4
- Suporta multi-rotor, asa fixa, VTOL asa fixa, helicóptero não tripulado, veículos não tripulados e navios não tripulados (submersíveis)
- Sincronização de dados Ethernet de alta velocidade com computadores de missão e outros dispositivos a bordo onde suportado
Para verificações de compatibilidade e questões de configuração, contacte [email protected] ou visite https://rcdrone.top/.
Vídeo
Detalhes

O controlador de voo Pixhawk V6X V2 utiliza um processador H7 e apresenta IMU tripla redundante, barômetro duplo e bússola RM3100 com um design de absorção de choque.

O Pixhawk V6X V2 utiliza um processador STM32H753IIK6 H7 para suportar configurações de controle de voo baseadas em PX4 e ArduPilot.

O Pixhawk V6X V2 utiliza um suporte de absorção de choque de três eixos (X, Y, Z) com quatro suportes de canto inclinados para ajudar a reduzir vibrações e ruído.
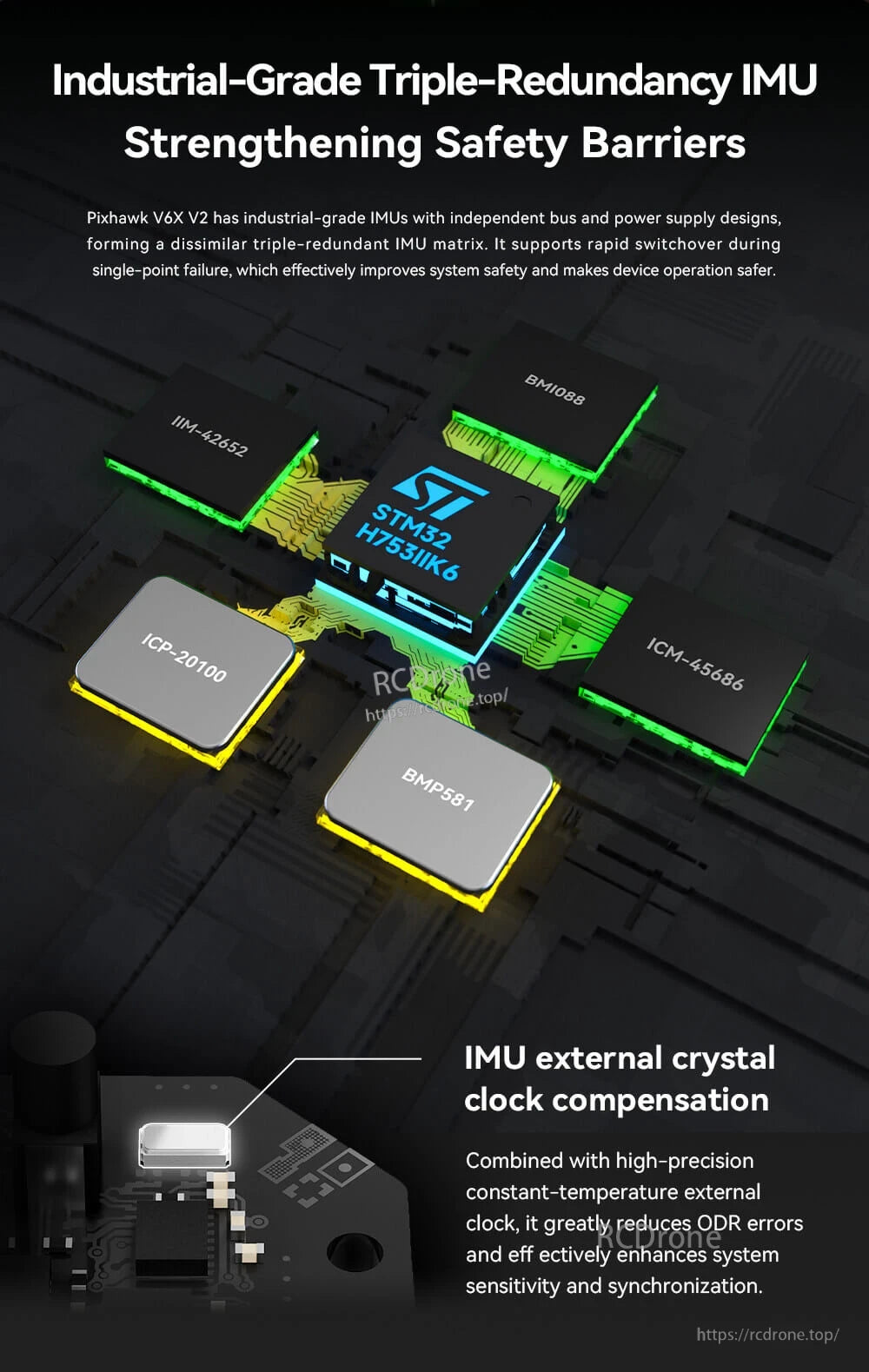
O design do controlador de voo Pixhawk V6X V2 apresenta uma configuração IMU tripla redundante em torno do STM32H753IIK6, além de compensação de relógio de cristal externo para temporização de sensores.

O Pixhawk V6X V2 integra um magnetômetro RM3100 de grau automotivo e suporta determinação de direção GPS para uma orientação e navegação mais estáveis.
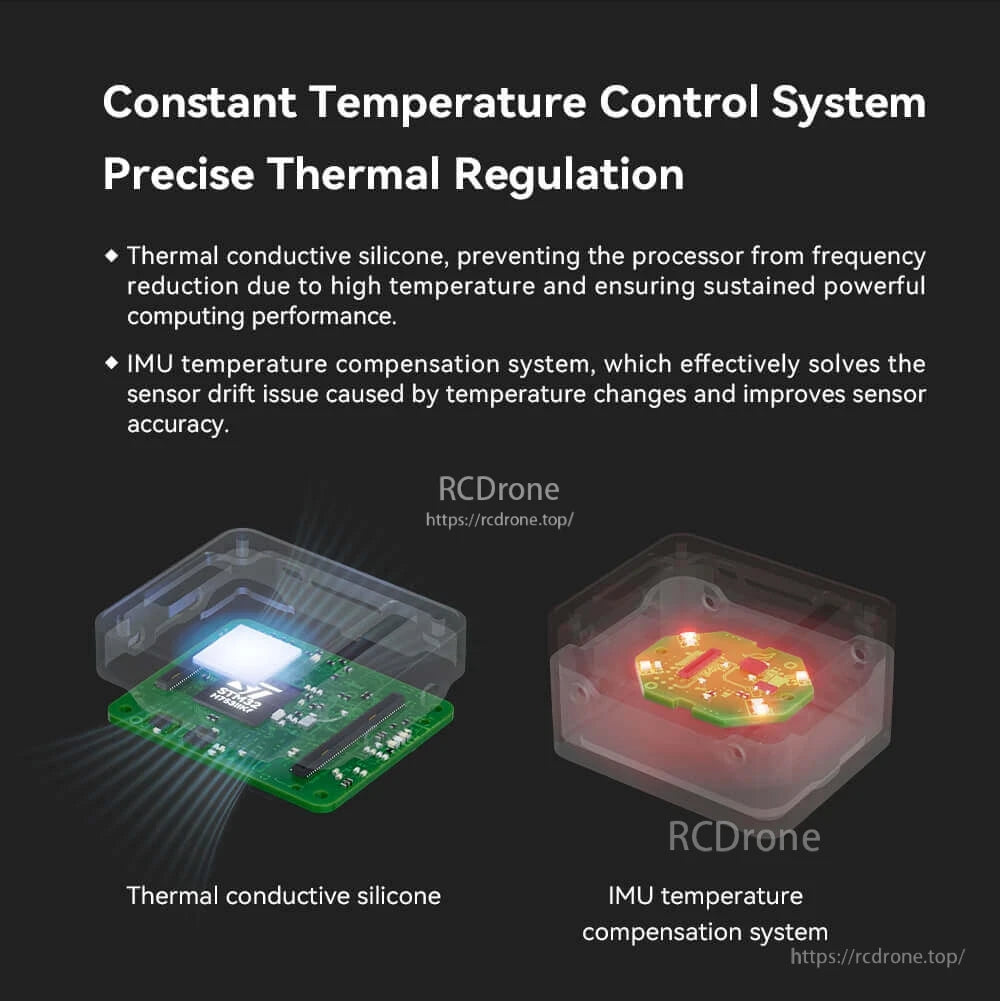
Um sistema de controlo de temperatura constante utiliza silicone condutor térmico e compensação de temperatura IMU para reduzir a deriva relacionada com a temperatura.
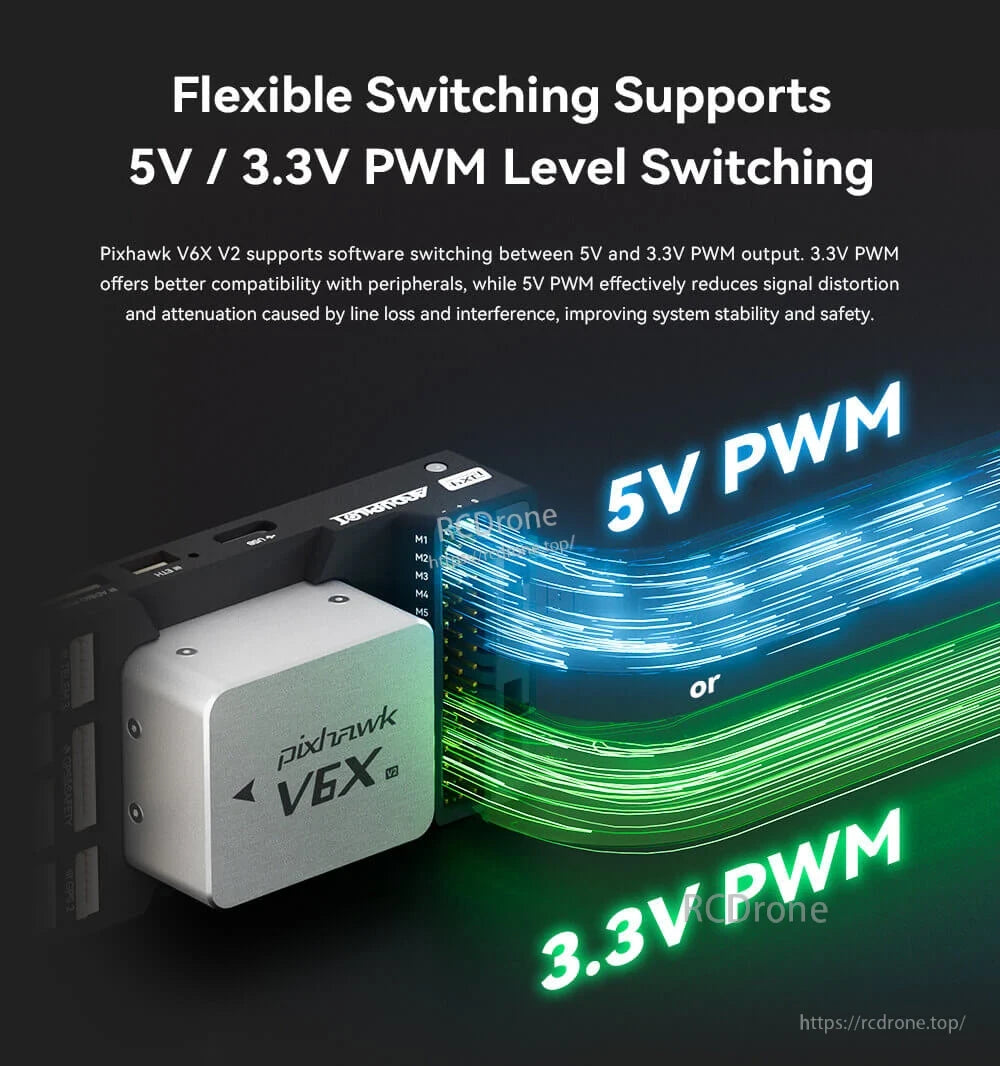
O Pixhawk V6X V2 suporta a comutação flexível entre níveis de saída PWM de 5V e 3.3V para uma compatibilidade mais fácil com diferentes periféricos.

O Pixhawk V6X V2 integra uma interface Ethernet de 100 Mbps juntamente com portas rotuladas como USB, TELEM3, CAN e GPS & Segurança para uma fiação limpa.
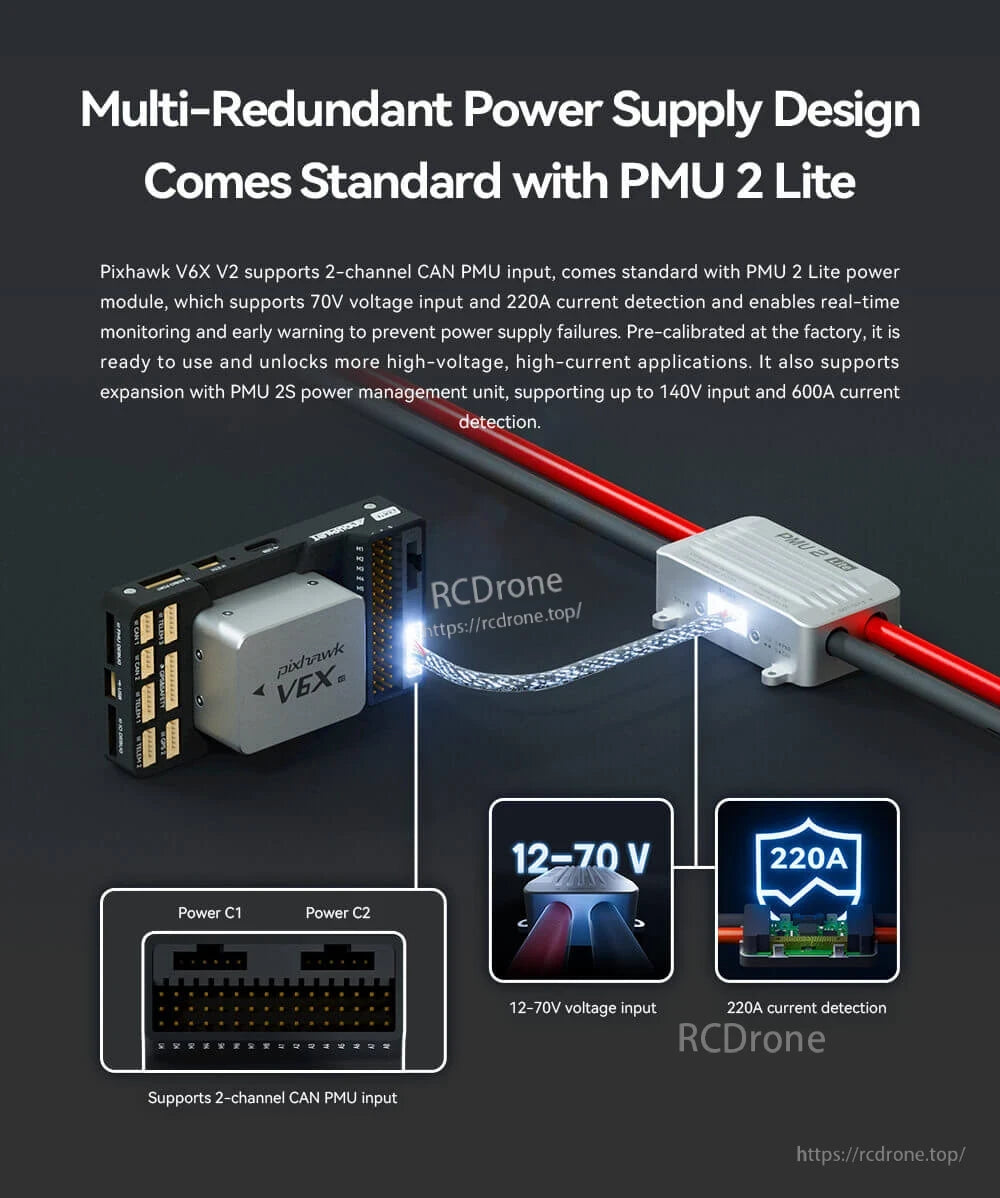
O Pixhawk V6X V2 emparelha-se com o módulo PMU 2 Lite para entrada de energia multi-redundante, suportando 12–70V e deteção de corrente de 220A.

O CUAV Pixhawk V6X V2 utiliza um módulo central modular e destacável numa placa de suporte para simplificar a personalização e o acesso aos conectores.
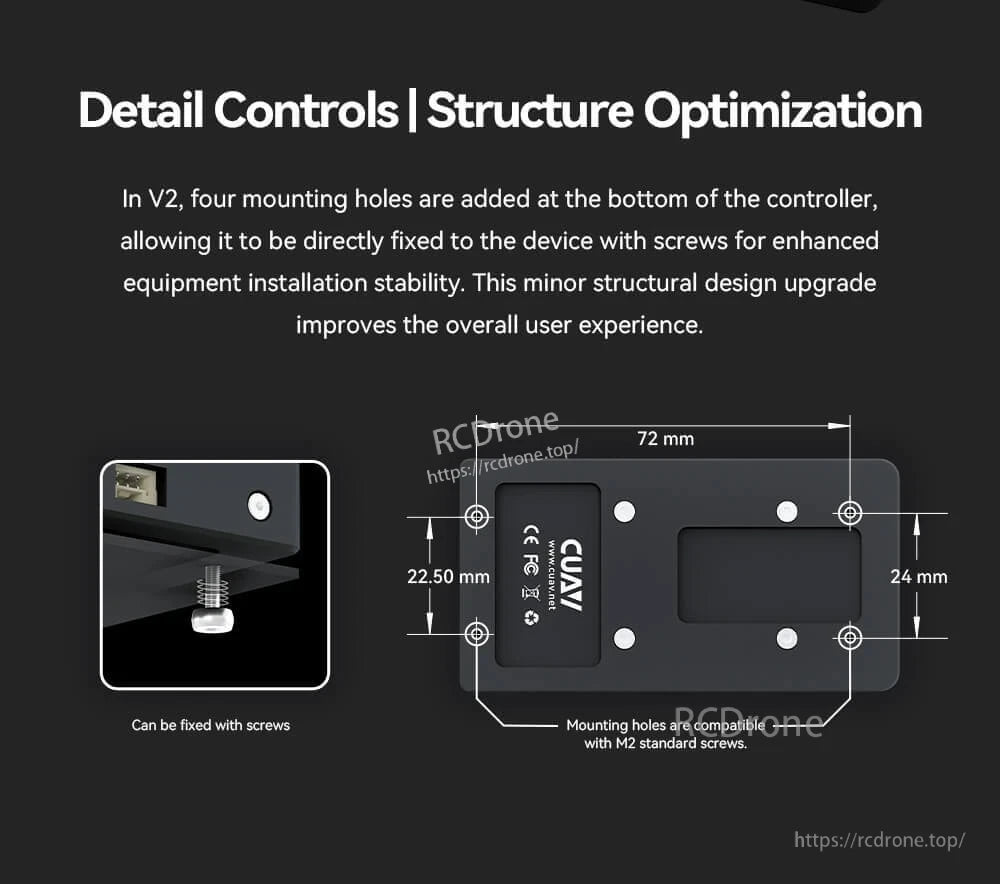
O CUAV Pixhawk V6X V2 adiciona quatro furos de montagem inferior compatíveis com M2 com uma pegada de 72 mm para uma instalação mais segura por parafusos.

O Pixhawk V6X V2 suporta o firmware ArduPilot e PX4 para uma variedade de plataformas não tripuladas, incluindo multirrotores, aeronaves de asa fixa e veículos terrestres ou marinhos.
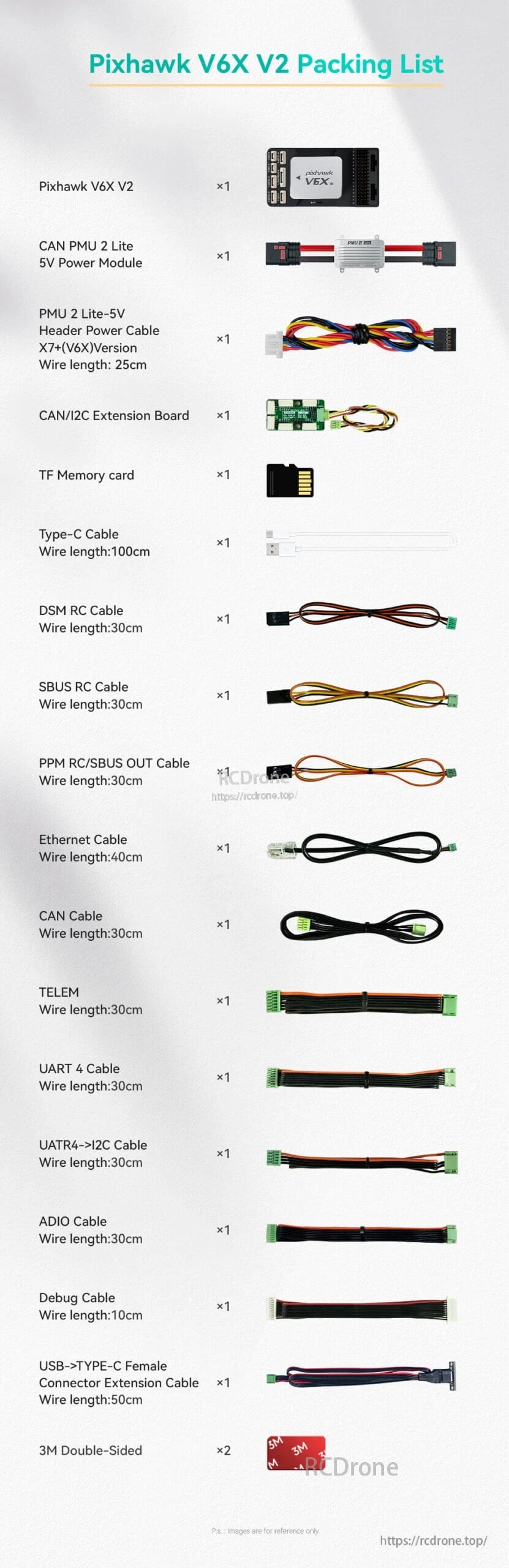
O kit Pixhawk V6X V2 inclui o controlador de voo, módulo de potência CAN PMU 2 Lite 5V, cartão de memória TF e um conjunto de cabos Type‑C, RC, Ethernet, CAN, TELEM, UART, ADIO e de depuração.
Related Collections


















