








CUAV X25 EVO Controlador de Voo Autopiloto - STM32H7, IMU Triplo, Barómetro Duplo, RM3100, CAN, 16 PWM, PX4/ArduPilot
CUAV X25 EVO Controlador de Voo Autopiloto - STM32H7, IMU Triplo, Barómetro Duplo, RM3100, CAN, 16 PWM, PX4/ArduPilot
CUAV
Não foi possível carregar a disponibilidade de recolha
Visão Geral
CUAV X25 EVO é um controlador central de alta fiabilidade para sistemas não tripulados. Combina um processador STM32H7 (480 MHz, 2 MB Flash) com um array IMU industrial triplo, barómetros duplos e magnetómetros RM3100. Uma arquitetura de energia redesenhada suporta 10–18 V de entrada e fornece até 5 V/12 A de saída externa para alimentar cargas pesadas. O controlador integra redundância de energia em caminho duplo, proteção abrangente contra ESD/sobre-corrente, indicação de estado RGB e um design modular CORE/carrier. É compatível com ArduPilot e PX4, e é adequado para multirrotores, asas fixas, VTOL, helicópteros, UGV/USV/UUV e outras plataformas.
Principais Características
-
Computação de alto desempenho: STM32H7 @ 480 MHz, 2 MB Flash; baixa utilização da CPU para algoritmos avançados (navegação não-GPS, filtros FFT, scripts LUA).
-
Conjunto de sensores industriais:
-
IMUs: 2× TDK IIM-42653 (±4000 °/s, ±32 g) + 1× TDK IIM-42652 (±2000 °/s, ±16 g).
-
Magnetómetros: PNI RM3100 (anti-interferência).
-
Barómetros: TDK ICP20100 & Bosch BMP581 (duplo).
-
Matriz IMU heterogénea com comutação tolerante a falhas.
-
-
Sistema de compensação de temperatura dupla para a IMU: compensação em tempo real ±0.5 °C; em comparação com a geração anterior—15% menor deriva de temperatura, 25% melhor consistência na solução de atitude.
-
Isolamento de vibrações: amortecimento em matriz de nylon simétrico inclinado de 4ª geração; isoladores externos de ouvido fixo opcionais para suprimir vibrações anormais de alta frequência e melhorar a fidelidade dos dados.
-
Arquitetura de energia: DC-DC de alta potência a bordo 5 V/15 A; porta externa suporta saída de 5 V/12 A; faixa de entrada 10–18 V.
-
Rede &e barramentos: CAN bus (bateria inteligente/ESC/servos, feedback de telemetria) + 100 M Ethernet.
-
Abundância de I/O: até 16 PWM através de portas de servo; até 32 PWM através da expansão CAN.
-
Ruggedização &e QA: redundância de energia de canal duplo, proteção ESD &e sobrecorrente, design de conector antiestático, revestimento conformal de PCB e testes totalmente automatizados.
-
Indicador de estado RGB: LEDs multicoloridos para armamento, energia, GNSS/posição, modos de falha, etc.
Especificações
| Categoria | Detalhe |
|---|---|
| Processador | STM32H7 Arm® Cortex®-M7 @ 480 MHz, 2 MB Flash |
| Versão | X25 EVO |
| IMUs | IIM-42653 ×2 (giroscópio ±4000 °/s; aceleração ±32 g); IIM-42652 ×1 (giroscópio ±2000 °/s; aceleração ±16 g) |
| Magnetómetro | RM3100 |
| Barómetros | TDK ICP20100 / Bosch BMP581 (duplo) |
| Saídas PWM | 16 (banco de servos M1–M16) |
| Entradas de energia (CAN) | 2 |
| Portas GPS | 2 |
| Portas TELEM | 2 |
| UART4 | 1 |
| Entrada RC | 1 (PPM / SBUS / DSM etc.html ) |
| DEBUG (DSU) | 1 |
| Ethernet | 1 (100 M) |
| CAN | CAN1 ×3, CAN2 ×2 (total 5) |
| expansão SPI6 | 1 |
| ADC | 1× 3V3, 1× 6V6 |
| USB | 1× Tipo-C |
| I²C | 3 |
| RSSI | 1 |
| Módulo de potência | PMU 2 Lite |
Condições de Operação &e Físicas
| Item | Valor |
|---|---|
| Tensão de entrada (controlador) | 10–18 V |
| USB | 4.75–5.25 V |
| Faixa de fornecimento PMU 2 Lite | 20–70 V |
| Trilho externo de 5 V | até 12 A de saída (para periféricos/cargas pesadas) |
| Temperatura de operação | −20 °C a +85 °C |
| Dimensões | 76.5 × 45.45 × 32.2 mm |
| Peso | 110 g |
Interfaces &e Destaques de Layout
-
Trilhos DUAL POWER C1/C2, RC IN, Banco de servos M1–M16.
-
Conectores laterais para UART/TELEM, ADC, USB-C (debug/IO), I²C, CAN1/CAN2, ETH.
-
Núcleo projetado que pode ser destacado para desenvolvimento de placa de transporte personalizada.
Compatibilidade &e Aplicações
-
Firmware: totalmente compatível com ArduPilot e PX4 (drivers &e funcionalidades).
-
Veículos: multirotor, asa fixa, VTOL, helicópteros, UGV, USV, UUV/submersível, e outras plataformas não tripuladas.
Na Caixa (Kit X25 EVO)
-
X25 EVO controlador de voo × 1
-
módulo de potência CAN PMU2 Lite (15 V) × 1
-
placa de expansão CAN × 1
-
cabos de dados CAN (35 cm) × 2
-
cabo USB Tipo-C (100 cm) × 1
-
cabos TELEM (30 cm) × 2
-
cabo RSSI (22 cm) × 1
-
cabo RC IN (30 cm) × 1
-
cabo de potência do controlador inteligente CAN PMU2 Lite 15 V (30 cm) × 1
Detalhes

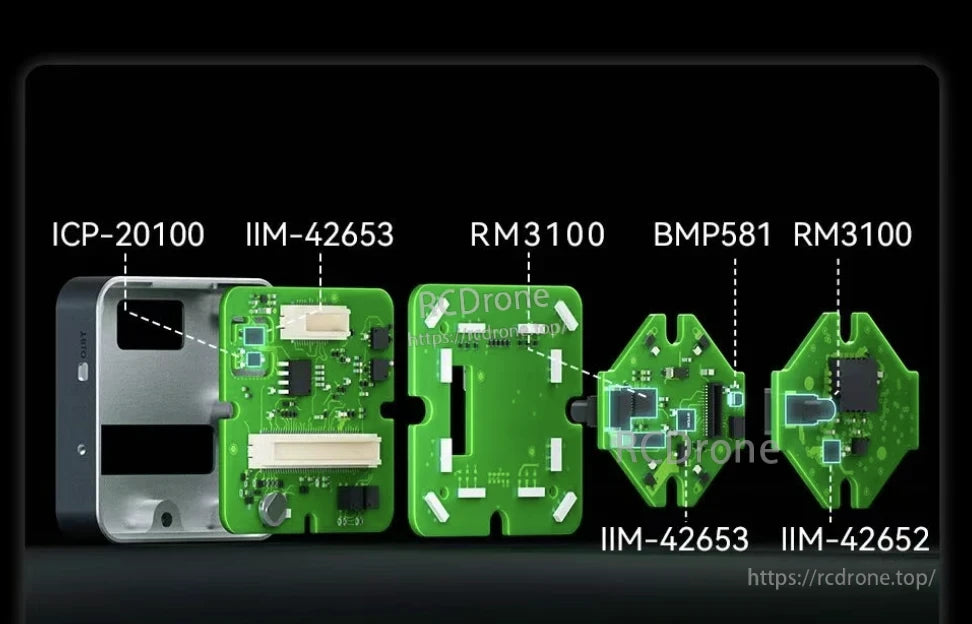
Componentes do controlador de voo CUAV X25 EVO rotulados com modelos de chip.


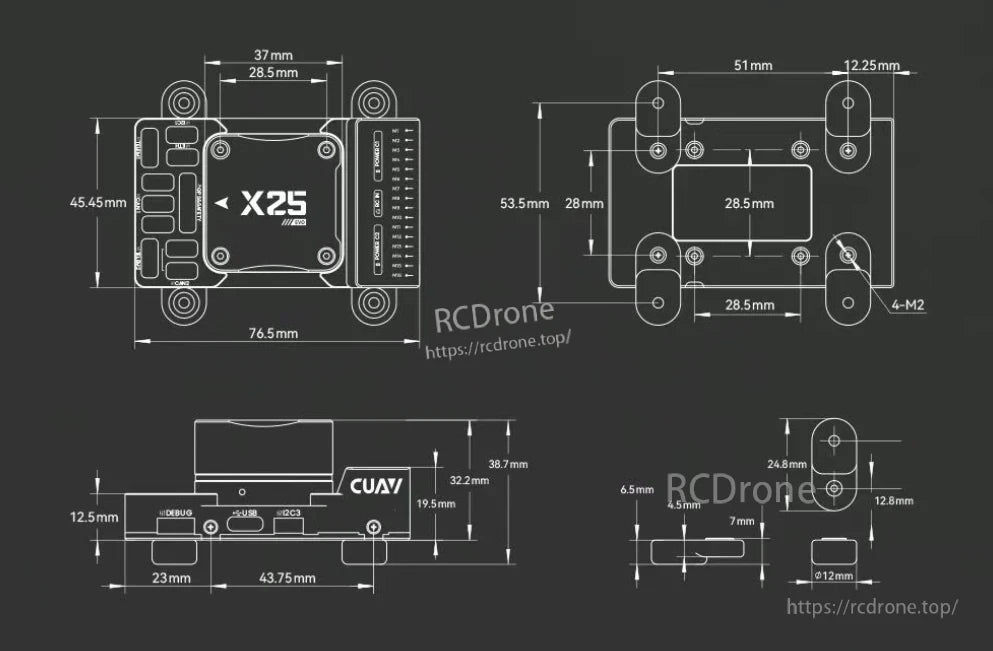
O controlador de voo CUAV X25 EVO mede 76,5 mm x 45,45 mm, possui portas de depuração, USB e I2C3, e inclui quatro parafusos M2 para montagem segura.

X25 EVO Autopilot inclui controlador de voo, módulo de potência, placa de expansão CAN, cabos de dados e telemetria, cabo Tipo-C, fios RSSI e RC IN, e linha de alimentação.
Related Collections








