






Controlador de vôo CUAV X7 Plus - código aberto para APM PX4 Pixhawk FPV asa fixa RC UAV Drone Quadcopter
Controlador de vôo CUAV X7 Plus - código aberto para APM PX4 Pixhawk FPV asa fixa RC UAV Drone Quadcopter
CUAV
Não foi possível carregar a disponibilidade de recolha
Especificações do CUAV X7 Plus
- Interfaces:
- 2 portas de alimentação (Power A é uma interface ADC comum, Power C é uma interface de bateria uavcan)
- Suporta múltiplas entradas RC (SBUs/CPPM/DSM)
- 14 saídas PWM (12 suportam Dshot)
- 4 barramentos i2c (duas portas i2c dedicadas)
- 2 portas GPS (portas GPS e UART4)
- Entrada RSSI analógica/PWM
- 2 portas de barramento CAN
- 2 entradas ADC
- 1 porta USB
- Sensores integrados:
- Acelerômetro/Giroscópio: ICM-20689
- Acelerômetro/Giroscópio: ICM-20649
- Acelerômetro/Giroscópio: BMI088
- Magnetômetro: RM3100
- Barômetro: MS5611*2
- Temperatura operacional: -20 ~ 80°c
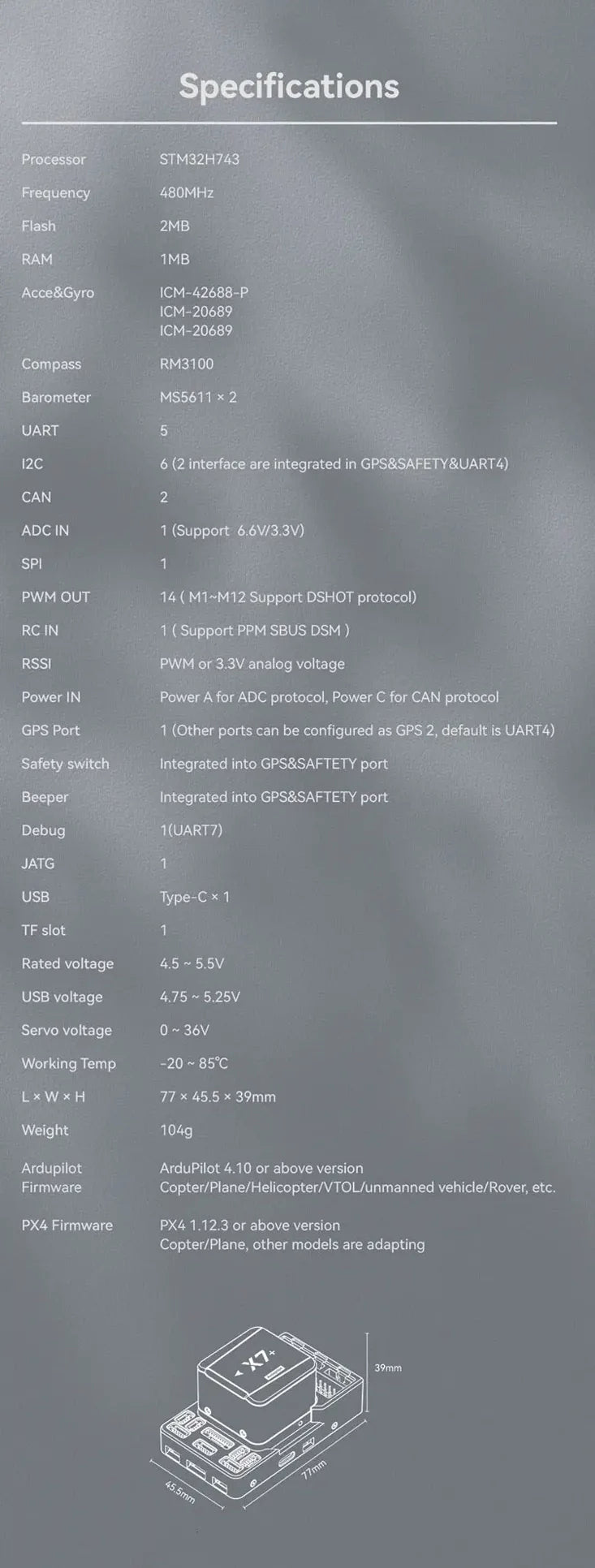
- Processador FMU Principal: STM32H743
- Sistema de energia:
- Entrada do servo-trilho: 0~36V
- Entrada USB: 4,75~5,25V
- Potência: 4,3~5,4V
- Peso: 101g
Inclui
- 1x controlador de voo de piloto automático padrão CUAV X7+ (para PX4/APM)
- 1x Módulo de Potência CAN PMU Lite
- Placa de extensão CAN 1z
- 1 cartão de memória 16G
- 1x Cabo 12C/CAN
- 1x Módulo Pw-Link
- 1x Cabo ADC3.23
- 1x cabo USB-C
- 1x cabo RSSI
ESPECIFICAÇÕES DO Controlador de Vôo CUAV X7 Plus
Distância entre eixos: Parafusos
Atualizar peças/acessórios: Cubo da roda
Suprimentos de ferramentas: Corte
Parâmetros técnicos: Valor 3
Tamanho: 77x45x39
Periféricos/dispositivos de controle remoto: Motor
Idade recomendada: 18+
Peças e acessórios RC: EIXO
Quantidade: 1 peça
Origem: China Continental
Número do modelo: Controlador de voo X7 Plus
Material: Metal
Atributos de tração nas quatro rodas: Motores
Para tipo de veículo: Aviões
CUAV Flight Controller Open Source para APM PX4 Pixhawk FPV RC Drone Quadcopter Versão X7
Principal diferença de X7 E X7PLUS:
1. A perspectiva é a diferença,
2.o sensor é diferente
Aqui está a descrição do X7:
Descrição do controlador de voo CUAV X7 +
O controlador de vôo X7+ é aprimorado com uma nova linha de sensores, apresentando o poderoso processador STM32H743, acelerômetro e giroscópio ICM-42688-P e bússola industrial RM3100 para navegação superior e estabilidade em sistemas de controle de vôo.

Desempenho poderoso do processador H7
O piloto automático X7+ aproveita o processador da série STM32H743, apresentando um núcleo Cortex-M7 equipado com uma unidade de ponto flutuante (FPU) de dupla precisão, impulsionando sua frequência operacional para impressionantes 480MHz. Com 2 MB de Flash e 1 MB de RAM, ele atende às exigentes necessidades computacionais de controladores de vôo avançados. Comparado à linha STM32F7, o STM32H7 oferece o dobro da eficiência dinâmica de consumo de energia, garantindo desempenho poderoso para operações de voo complexas.
O conjunto de sensores do controlador de vôo recebeu uma atualização significativa com a adição do sensor ICM-42688-P. Esta atualização marca uma melhoria substancial em relação às IMUs de consumo tradicionais, com uma redução de 40% no valor do ruído e uma duplicação da estabilidade de temperatura. Essas melhorias garantem que o controlador de voo mantenha a mais alta precisão de medição, mesmo em meio a flutuações de temperatura, enfatizando o compromisso com a confiabilidade e o desempenho em diversas condições ambientais.
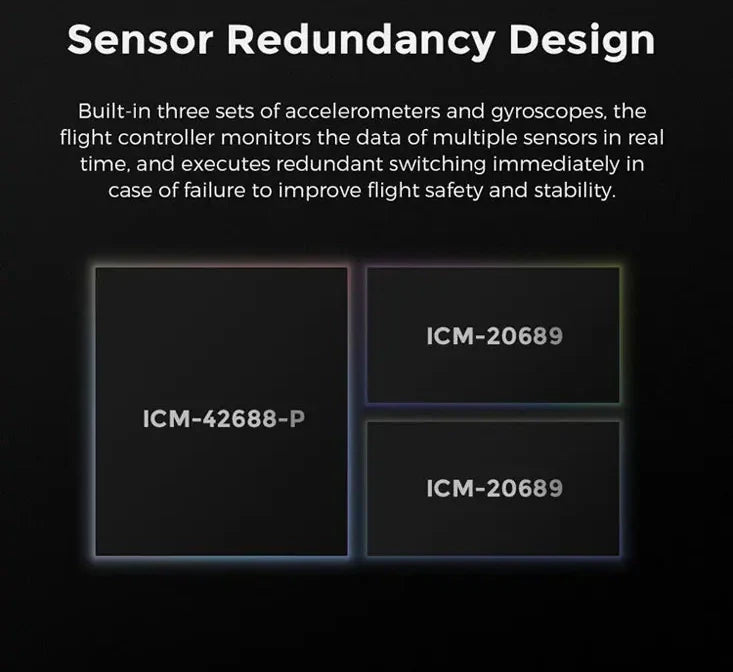
O controlador de vôo apresenta um design de redundância de sensor com três conjuntos de acelerômetros e giroscópios, incluindo os modelos ICM-20689 e ICM-42688-P. Este design permite o monitoramento em tempo real de dados de vários sensores, permitindo que o sistema mude instantaneamente para um sensor de backup em caso de falha. Essa redundância aumenta a segurança e a estabilidade do voo, garantindo uma operação contínua e confiável mesmo em condições desafiadoras.
Sistema de compensação de temperatura
O sistema integrado de compensação de temperatura do sensor de alta precisão faz com que o sensor funcione em uma temperatura constante, garantindo que o sensor possa operar de forma estável com alta precisão e sensibilidade em alta e baixa
Design separado CORE
O controlador de vôo X7+ integra o MCU principal e o IMU no módulo CORE e pode ser vendido separadamente. Os usuários podem projetar o rodapé de acordo com a estrutura do UAV para atender às necessidades individuais dos usuários ou adquirir nosso rodapé CAN PDB para uso. A interface X7+ CORE é compatível com o controlador de vôo X7, X7 Pro e V5+ CORE. • X7+

Melhor sistema de absorção de choque patenteado pela CUAV
Após dezenas de iterações, centenas de materiais de absorção de choque foram testados e verificados, análise de modelos de computador e milhares de testes de voo, melhorando assim a absorção de choque para um nível adicional Boot

melhor sistema de absorção de choque patenteado pela CUAV. centenas de iterações, centenas de materiais de absorção de choque testados e verificados. dezenas de testes, análise de modelos de computador e milhares de testes de voo.
O X7+ AutoPilot está equipado com recursos robustos de segurança e desenvolvimento, incluindo proteção contra sobrecorrente para suas saídas de 5 Volts, limitando a corrente a 2,5A e ao mesmo tempo incorporando proteção contra curto-circuito. Para construção de firmware, ele utiliza a porta DSU7 para console serial e conexões de interface SWD, compatível com o cabo CUAV FTDI para depuração direta através da porta USB de um computador. Além disso, o X7+ suporta redundância tripla na sua fonte de alimentação quando conectado a três fontes, garantindo confiabilidade operacional. Este design prioriza a segurança de voo, estabilidade e facilidade de desenvolvimento, marcando o X7+ como uma opção versátil e segura para operações avançadas de drones.
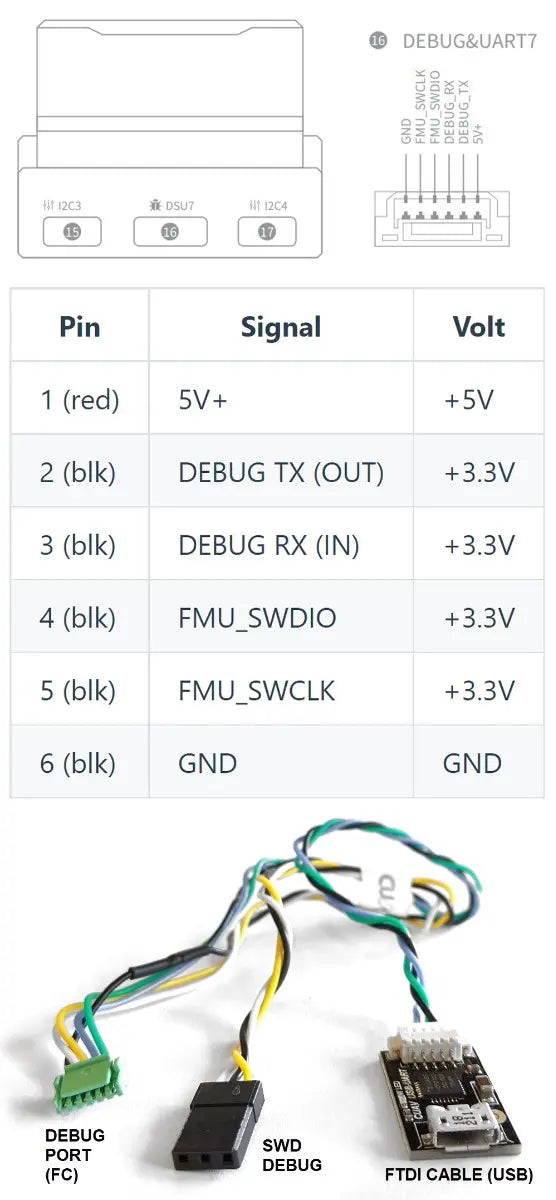
DEBUG e UART7 18 E A 822834 W6 I2C3 DSUT 42C4 Pin Signal Volt (vermelho) 5V + +5V 2 (preto)
Análise do controlador de voo CUAV X7 Plus
vídeo de unboxing do cuav x7+
instalação do controlador de vôo cuav x7+ do firmware ardupilot
Controlador de voo CUAV X7+ conectado ao controle remoto SIYI MK15










