






CubeMars AK10-9 V2.0 Atuador Robótico KV60/KV100 | Binário Nominal 18Nm/15Nm, Encoder Duplo, Modos MIT & Servo
CubeMars AK10-9 V2.0 Atuador Robótico KV60/KV100 | Binário Nominal 18Nm/15Nm, Encoder Duplo, Modos MIT & Servo
CubeMars
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O CubeMars AK10-9 V2.0 é um atuador robótico altamente integrado que combina um motor BLDC de alto desempenho, redutor planetário, encoders duplos e driver integrado numa unidade compacta. Suportando tanto o modo de potência MIT como o modo de controlo servo industrial, oferece saída de torque suave, posicionamento preciso e resposta rápida, tornando-o ideal para robôs bípedes, exoesqueletos e AGVs. Disponível nas variantes KV60 e KV100, oferece até 48Nm de torque de pico, com dissipação de calor otimizada e monitorização de temperatura em tempo real para fiabilidade a longo prazo.
Principais Características
-
Modos de Controlo Duplos: Suporta a troca sem interrupções entre o modo de potência MIT e o modo de controlo servo para um controlo de movimento flexível.
-
Saída de Alto Torque: Até 48Nm de torque de pico com operação estável e baixo retrocesso (0.33°).
-
Altamente Integrado: Combina motor, encoder, driver e redutor planetário em uma forma compacta.
-
Saída & Encoders Internos: Encoders magnéticos integrados de 14 bits internos e 15 bits externos garantem feedback preciso.
-
Rolamentos de Rolo Cruzado: Aumenta a resistência a cargas axiais e radiais, melhorando a confiabilidade em aplicações dinâmicas.
-
Sensor de Temperatura Interno: Monitorização de temperatura em tempo real previne danos ao motor sob estresse térmico.
-
Dissipação de Calor Otimizada: Design de estrutura único melhora a gestão térmica, garantindo operação estável a longo prazo.
-
Operação Silenciosa: Nível de ruído tão baixo quanto 65 dB a 65cm (versão KV60).
Especificações
Especificações AK10-9 V2.0 K60
| Aplicação | Robô com pernas, Exoesqueleto, AGV | Torque de pico (Nm) | 48 |
| Método de acionamento | FOC | Corrente de pico (ADC) | 29.8 |
| Temperatura ambiente de operação | -20℃~50℃ | Kv (rpm/V) | 60 |
| Tipo de enrolamento | estrela | Kt (Nm/A) | 0.198 |
| Classe de isolamento | C | Ke (V/krpm) | 17.2 |
| Isolamento Alta Tensão | 1000V 5mA/2s | Resistência Fase a Fase (mΩ) | 195 |
| Resistência de Isolamento | 1000V 10MΩ | Indutância Fase a Fase (μH) | 181 |
| Fase | 3 | Inércia (gcm²) | 1002 |
| Pares de polos | 21 | Km (Nm/√W) | 0.45 |
| Relação de Redução | 9:1 | Constante de tempo mecânica (ms) | 0.5 |
| Força de retrocesso (Nm) | 0.8 | Constante de tempo elétrica (ms) | 0.93 |
| Folga (°) | 0.33 | Peso (g) | 960 |
| Sensor de temperatura | NTC MF51B 103F3950 | Relação máxima de torque por peso (Nm/kg) | 50 |
| Ruído dB a 65CM do motor | 65 | Conector CAN | A1257WR-S-4P |
| Classificações de carga básica (din. C ) N | 2000 | Conector UART | A1257WR-S-3P |
| Classificações de carga básica (stat.C0) N | 2520 | Conector de potência | XT30PW-M |
| Tensão nominal (V) | 24/48 | Tipo de encoder de laço interno | Encoder magnético |
| Torque nominal (Nm) | 18 | Resolução do encoder de anel interno | 14bit |
| Velocidade nominal (rpm) | 109/228 | Tipo de encoder de anel externo | Encoder magnético |
| Corrente nominal (ADC) | 10.6 | Resolução do encoder de anel externo | 15bit |
AK10-9 V2.0 KV100 Especificações
| Aplicação | Robô com pernas, Exoesqueleto, AGV | Torque de pico (Nm) | 38 |
| Método de acionamento | FOC | Corrente de pico (ADC) | 41.2 |
| Temperatura ambiente de operação | -20℃~50℃ | Kv (rpm/V) | 100 |
| Tipo de enrolamento | Delta | Kt (Nm/A) | 0.114 |
| Classe de isolamento | C | Ke (V/krpm) | 9.9 |
| Isolamento Alta tensão | 1000V 5mA/2s | Resistência fase a fase (mΩ) | 65.5 |
| Resistência de isolamento | 1000V10MΩ | Indutância de fase a fase (μH) | 60 |
| Fase | 3 | Inércia (gcm²) | 1002 |
| Pares de polos | 21 | Km (Nm/√W) | 0.45 |
| Relação de redução | 9:1 | Constante de tempo mecânica (ms) | 0.51 |
| Força de retrocesso (Nm) | 0.8 | Constante de tempo elétrica (ms) | 0.92 |
| Folga (°) | 0.33 | Peso (g) | 960 |
| Sensor de temperatura | NTC MF51B 103F3950 | Relação máxima de torque a peso (Nm/kg) | 39.6 |
| Nível de ruído dB a 65CM do motor | 70 | Conector CAN | A1257WR-S-4P |
| Classificações de carga básica (dyn. C) N | 2000 | Conector UART | A1257WR-S-3P |
| Classificações de carga básica (stat.C0) N | 2520 | Conector de potência | XT30PW-M |
| Tensão nominal (V) | 24/48 | Tipo de encoder de laço interno | Encoder magnético |
| Torque nominal (Nm) | 15 | Resolução do encoder de anel interno | 14bit |
| Velocidade nominal (rpm) | 205/421 | Tipo de encoder de anel externo | Encoder magnético |
| Corrente nominal (ADC) | 16.2 | Resolução do encoder do anel exterior | 15bit |
| Número de encoders | 2 |
Aplicações
-
Robôs Biónicos com Pernas
-
Exoesqueletos para Reabilitação ou Suporte de Carga
-
Veículos Terrestres Autónomos (AGV)
-
Sistemas de Controlo de Torque Articular
-
Robótica Humanoide e Quadrúpede
Downloads
![]() Manual do Driver e Controlo da Série AK v1.0.15.X.pdf
Manual do Driver e Controlo da Série AK v1.0.15.X.pdf
Detalhes
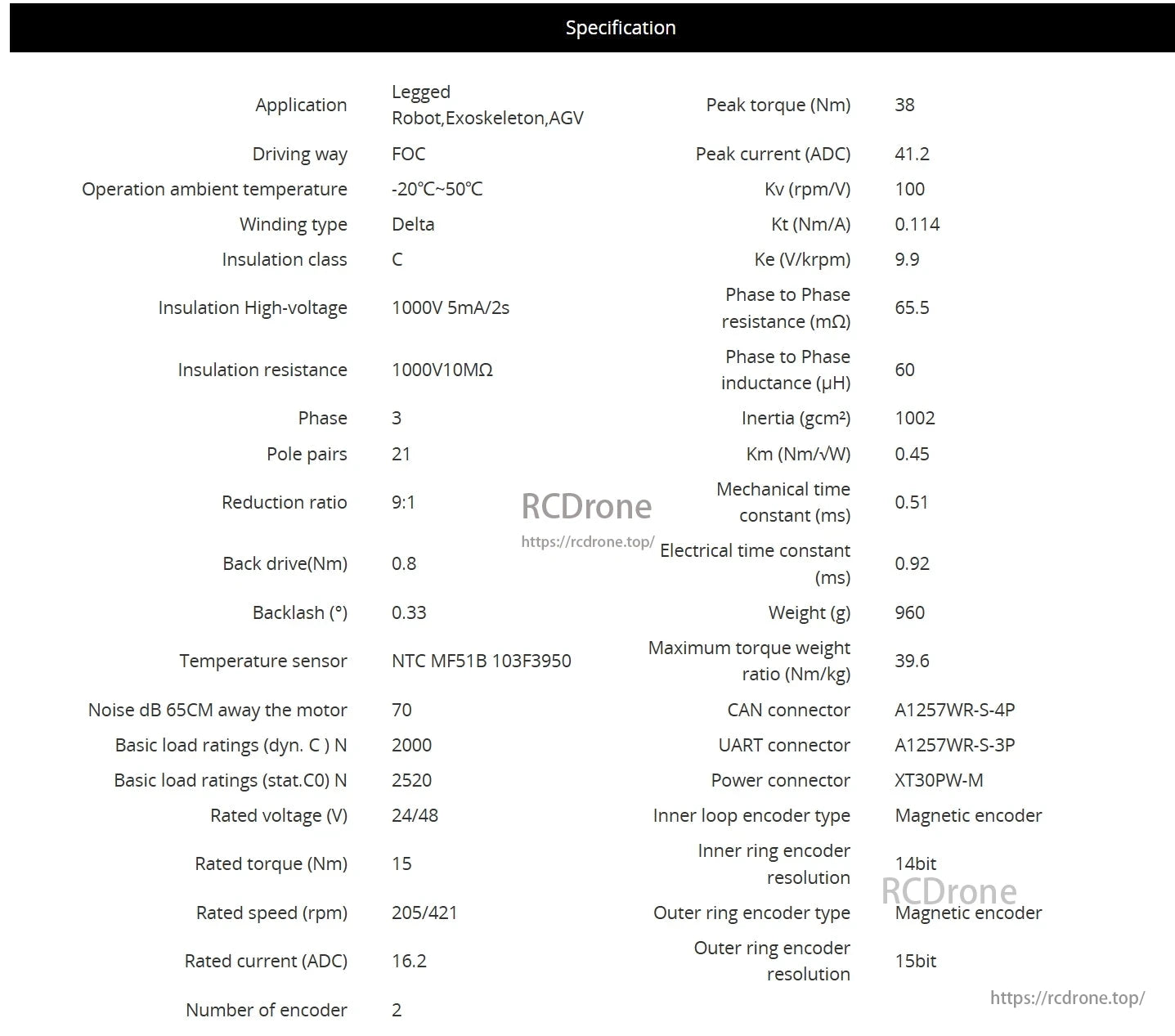
Atuador Robótico CubeMars AK10: 38 Nm de torque máximo, 41.2 A de corrente de pico, operação de -20°C a 50°C, relação de redução de 9:1, peso de 960g, relação de torque-peso máxima de 39,6 Nm/kg, ruído de 70 dB, encoders magnéticos, conectores CAN e UART.

Atuador Robótico CubeMars AK10: 48 Nm de torque de pico, 29,8 A de corrente de pico, operação de -20°C a 50°C, isolamento de 1000V, 3 fases, 21 pares de polos, relação de redução de 9:1, peso de 960g, relação de torque-peso máxima de 50 Nm/kg, encoders magnéticos.

Gráfico de Análise para CubeMars AK10-9 V2.0 KV60@48VDC actuator. Exibe potência de saída (W), eficiência, corrente (A) e velocidade (RPM) em relação ao torque (N.m). A eficiência atinge o pico em torno de 12 N.m, enquanto a potência de saída aumenta de forma constante com o torque. A corrente aumenta linearmente, e a velocidade diminui à medida que o torque aumenta. O gráfico destaca as características de desempenho do atuador, demonstrando sua capacidade sob cargas variáveis.Os principais indicadores incluem uma potência máxima de saída superior a 800 W e uma velocidade operacional de até 350 RPM em baixos torques. Estes dados ajudam a compreender a eficiência do atuador e a dinâmica de potência em diferentes aplicações.
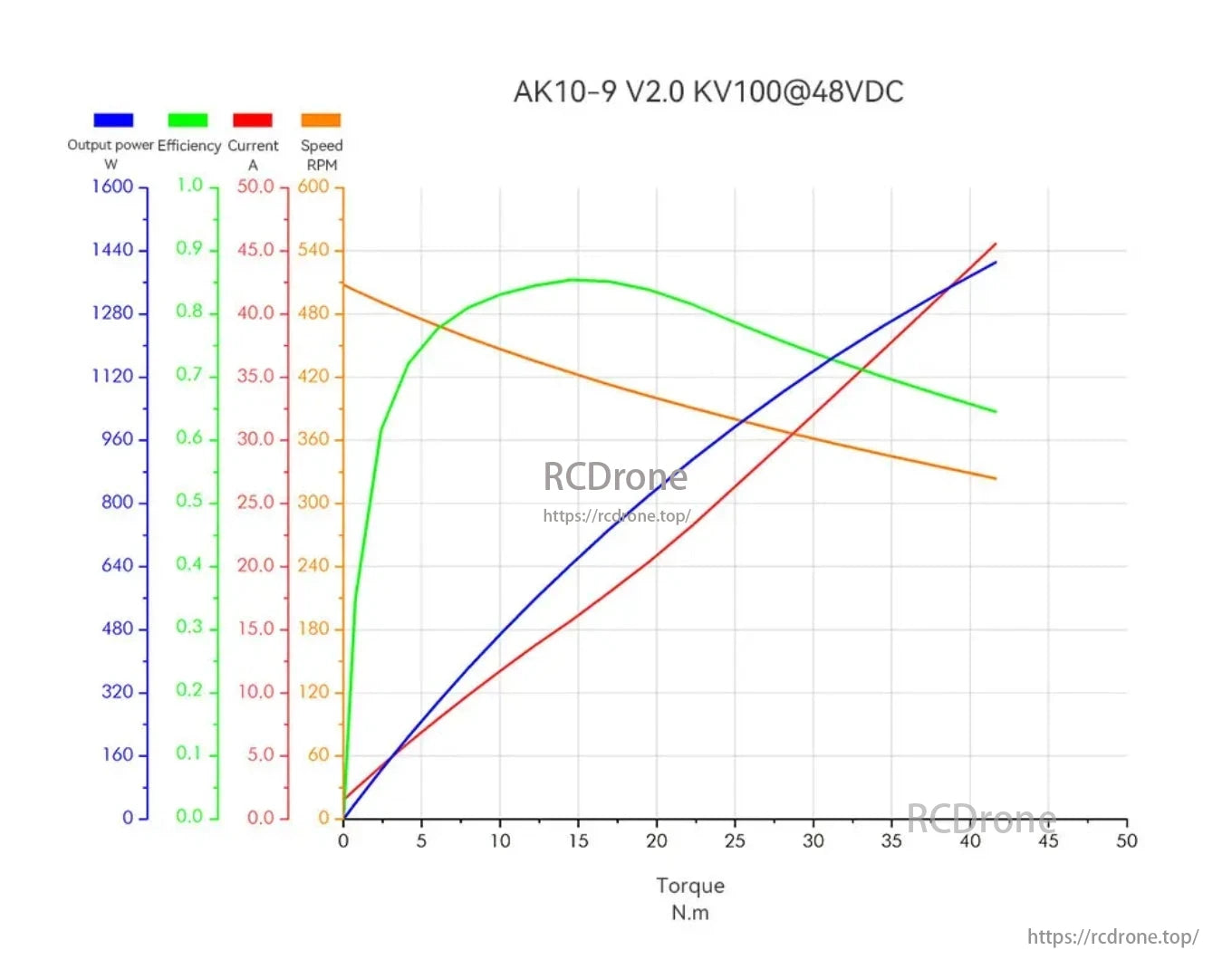
O desempenho do CubeMars AK10-9 V2.0 KV100@48VDC actuator é representado. A potência de saída (W), eficiência, corrente (A) e velocidade (RPM) são plotadas em função do torque (N.m). A eficiência atinge o pico em torno de 15 N.m, enquanto a potência de saída aumenta linearmente com o torque. A corrente também aumenta de forma constante com o torque. A velocidade diminui à medida que o torque aumenta, começando em aproximadamente 480 RPM a zero torque. O gráfico ilustra os pontos de operação ótimos para várias aplicações, destacando as capacidades do atuador sob diferentes condições de carga. Estes dados ajudam na seleção de configurações apropriadas para tarefas específicas.

Servo de potência integrado CubeMars AK10-9 KV60, modos incluídos. Atuador robótico com FCC, CE, RoHS V2.0 certificação.

O Atuador Robótico oferece controlo eficiente do motor, modo de potência preciso e resposta mais rápida para aplicações industriais.

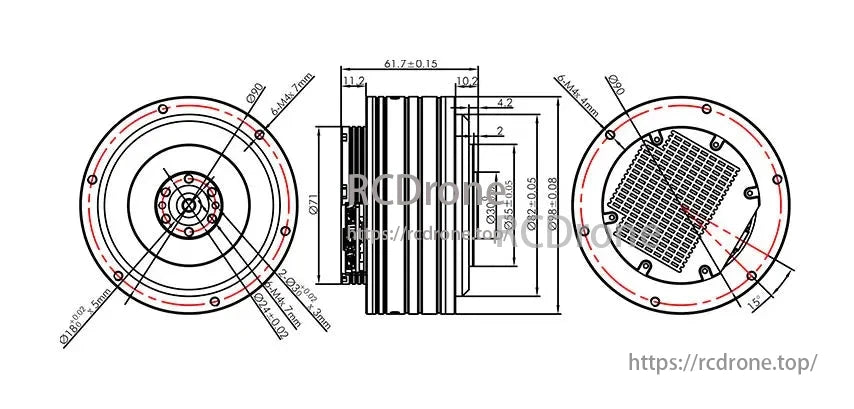
O Atuador Robótico CubeMars AK10 inclui um motor BLDC de alto desempenho, rolamento de rolos cruzados de grau industrial, sensor de temperatura, encoder de saída, modo de controlo duplo e redutor planetário para torque estável.

Otimize rapidamente a estrutura e a radiação de calor. Melhore a dissipação de calor da carcaça do motor para longevidade e estabilidade de desempenho do módulo de acionamento. SN: 1010921081.
Related Collections






