





CubeMars R80 KV110 Motor 48V 3-Fases FOC c/ Sensores Hall, Exoesqueleto & Condução Robótica
CubeMars R80 KV110 Motor 48V 3-Fases FOC c/ Sensores Hall, Exoesqueleto & Condução Robótica
CubeMars
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O Motor CubeMars R80 KV110 é um motor de 3 fases destinado a aplicações de acionamento em exoesqueletos e robótica, com sensores Hall integrados e suporte para FOC (controlo orientado por campo). Apresenta um design especial de dissipação de calor e uma interface de estilo conector para simplificar a instalação.
Características Principais
- Sensores Hall integrados
- Desvio de precisão do ângulo elétrico: ±10°
- Design especial de dissipação de calor (base ultra-fina & almofada de silicone de alta condutividade térmica; comprimento total reduzido para melhorar a dissipação de calor)
- Design de orifício padrão na campainha para instalação de redutor (redutor harmônico, flange ou outros tipos de redutores)
- Design de conector para instalação mais fácil (substitui fios tradicionais)
- Gráfico analítico de operação do motor fornecido (velocidade vs torque a 48V; zonas de operação não operacional / operação a curto prazo / operação contínua)
Especificações
| Aplicação | Exoesqueleto |
| Modo de condução | FOC |
| Temperatura ambiente de operação | -20℃~50℃ |
| Tipo de enrolamento | delta |
| Classe de isolamento | H |
| Isolamento Alta tensão | 1000V 5mA/2s |
| Resistência de isolamento | 1000V10MΩ |
| Fase | 3 |
| Pares de pólos | 21 |
| Tensão nominal (V) | 48 |
| Velocidade sem carga (rpm) | 4320 |
| Torque nominal (Nm) | 1.3 |
| Velocidade nominal (rpm) | 3580 |
| Corrente nominal (ADC) | 12.3 |
| Torque de pico (Nm) | 4 |
| Corrente de pico (ADC) | 38.6 |
| Kv (rpm/V) | 90 |
| Kt (Nm/A) | 0.107 |
| Ke (V/krpm) | 10.58 |
| Resistência fase a fase (mΩ) | 125 |
| Indutância fase a fase (μH) | 87 |
| Inércia (gcm²) | 759.98 |
| Km (Nm/√W) | 0.3026 |
| Constante de tempo mecânica (ms) | 0.83 |
| Constante de tempo elétrica (ms) | 0.70 |
| Peso (g) | 354 |
| Relação máxima de torque por peso (Nm/kg) | 11.3 |
| Fase do motor U V W | Desenho de engenharia de referência |
| Porta do sensor Hall | VCC, GND, Hu, Hv, HW (desenho de engenharia de referência) |
| Correspondência | Hu-U; Hv-V; Hw-W |
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV
- Robôs ARU
Manuais / Documentos
Para questões sobre fiação/seleção de driver ou ajuda com documentação, entre em contato com o suporte através de https://rcdrone.top/ ou envie um email para [email protected].
Nota do gráfico fornecido: Todos os dados são apenas para fins informativos | Sujeito a alterações sem aviso prévio.
Detalhes

CubeMars R80 KV110 é construído para articulações robóticas compactas e acionamentos de exoesqueletos, com um perfil baixo atuador-estilo de fator de forma.

Os sensores Hall integrados fornecem feedback da posição do rotor para um controle FOC estável, com uma precisão de desvio de ângulo elétrico classificada em ±10°.

Um design especial de dissipação de calor utiliza uma base ultra-fina e um pad de silicone de alta condutividade térmica para ajudar a gerir a temperatura em construções compactas.

Os orifícios de montagem padrão na campânula simplificam a fixação de uma caixa de engrenagens harmônica, flange ou outros tipos de caixas de engrenagens.
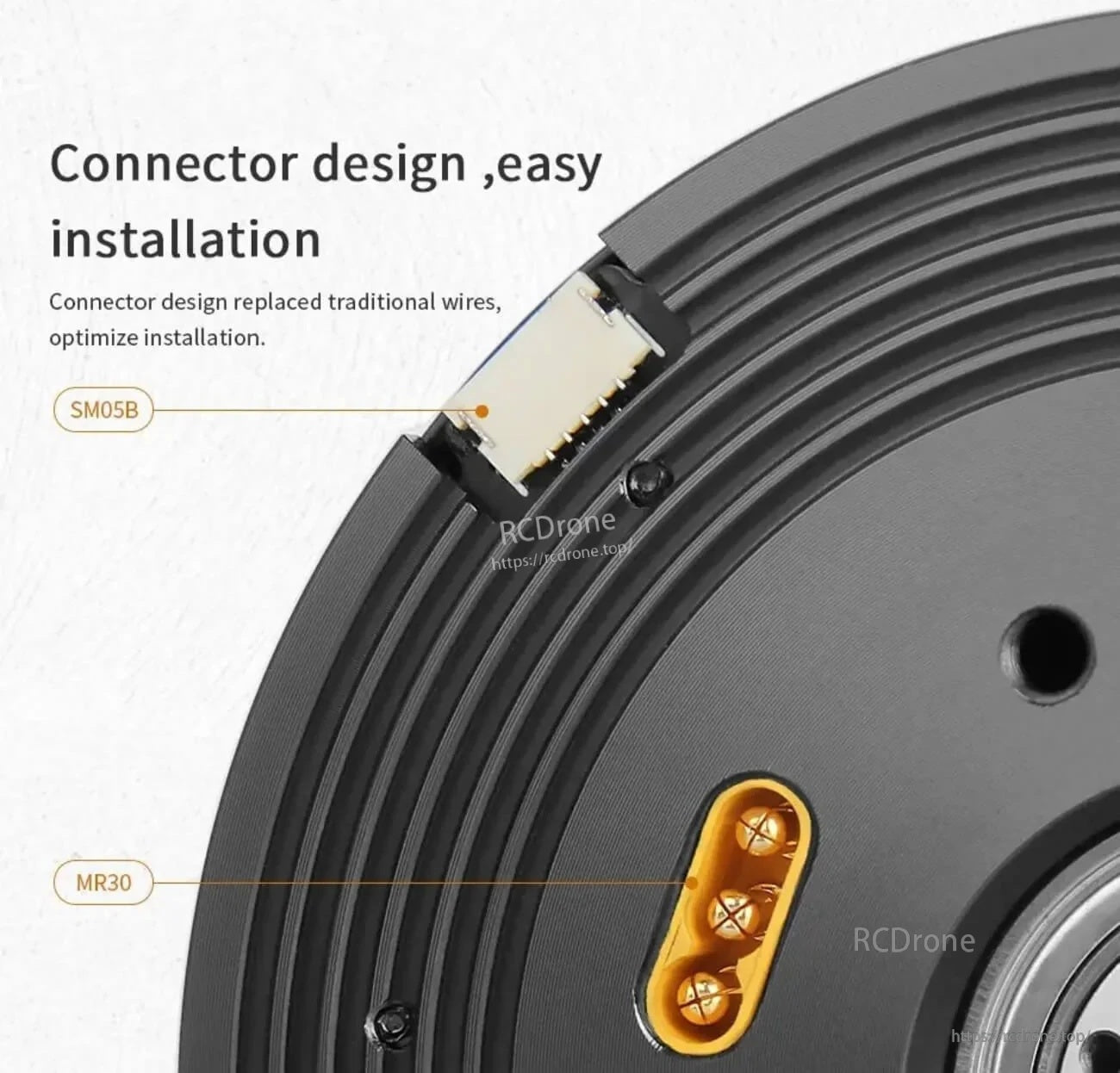
A fiação em estilo conector substitui os fios soltos tradicionais para uma instalação mais limpa e rápida das conexões de energia e sensores.
O design eletromagnético otimizado visa um baixo torque de arrasto e baixa inércia do rotor para um controlo de movimento mais suave.

Projetado para robôs de pernas de carga pesada e outras aplicações de juntas de alto torque onde a saída estável é importante.

O gráfico de operação de velocidade vs. torque de 48V ajuda a escolher uma faixa contínua segura e a entender a capacidade de pico a curto prazo.
Related Collections





