






Motor Torque CubeMars RI100 KV105 Sem Carcaça para Braço Colaborativo, Exoesqueleto, Braço Robótico
Motor Torque CubeMars RI100 KV105 Sem Carcaça para Braço Colaborativo, Exoesqueleto, Braço Robótico
CubeMars
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O Motor de Torque Inrunner Sem Moldura CubeMars RI100 KV105 é um motor BLDC de alto desempenho projetado para aplicações de precisão, como braços de cobot, exoesqueletos, robôs com pernas e braços robóticos. Operando em 12V–48V, oferece até 4.95 Nm de torque de pico, mantendo dimensões compactas e baixo torque de arrasto para controle de movimento suave e preciso. Com uma estrutura sem moldura e inrunner, oferece uma excelente densidade de torque, estabilidade térmica e flexibilidade para integração personalizada em estruturas robóticas compactas ou leves.
Principais Características
-
Ampla Faixa de Tensão: Compatível com fontes de alimentação de 24V, 36V e 48V.
-
Controle de Alta Precisão: Suporta resoluções de encoder de até 0.01°, compatível com Renishaw e Sick encoders.
-
Baixo Torque de Cosseno: Permite uma rotação mais suave e baixo ruído—ideal para articulações dinâmicas de robôs.
-
Rotor de Íman Permanente Curvo: Otimizado para controlo de drive sinusoidal BEMF, garantindo melhor capacidade de resposta e eficiência.
-
Estator Enrolado à Mão: 0,5 mm de folga e alto fator de preenchimento para alta saída de torque e baixa inércia (215,5 g·cm²).
-
Alta Tolerância Térmica: Suporta ambientes de trabalho de -40°C a 85°C (estrutura do motor testada de -20°C a 50°C).
-
Leve e Compacto: Apenas 500g com uma relação torque-peso máxima de 9,9 Nm/kg.
Especificações
Parâmetros Gerais
| Parâmetro | Valor |
|---|---|
| Aplicação | Braço Cobot / Exoesqueleto |
| Tipo de Motor | BLDC Inrunner Sem Quadro |
| Fase | 3 |
| Tipo de Enrolamento | Delta |
| Pares de Polos | 14 |
| Peso | 500g |
| Relação Torque-Peso | 9.9 Nm/kg |
Características Elétricas
| Parâmetro | Valor |
|---|---|
| Tensão Nominal (V) | 24 / 36 / 48 |
| Torque Nominal (Nm) | 1.76 |
| Torque de Pico (Nm) | 4.95 |
| Velocidade Nominal (rpm) | 1370 / 2100 / 2825 |
| Velocidade em Vazio (rpm) | 2184 / 3276 / 4368 |
| Corrente Nominal (ADC) | 13.6 |
| Corrente de Pico (ADC) | 38.6 |
| Kv (rpm/V) | 105 |
| Kt (Nm/A) | 0.129 |
| Ke (V/krpm) | 10.47 |
| Km (Nm/√W) | 0.3634 |
| Resistência (mΩ) | 126 |
| Indutância (µH) | 366.7 |
| Constante de Tempo Mecânica (ms) | 0.16 |
| Constante de Tempo Elétrica (ms) | 2.91 |
| Inércia (g·cm²) | 215.5 |
Fiação do Conector
| Sinal | Especificação do Cabo |
|---|---|
| U | Fio de Silicone Preto + 16# |
| V | Fio de Silicone Amarelo + 16# |
| W | Fio de Silicone Vermelho + 16# |
| Hu | Fio de Silicone Amarelo + 30# |
| Hv | Fio de Silicone Verde + 30# |
| Hw | Fio de Silicone Azul + 30# |
| VCC GND | Fios Vermelho + 30# & Preto + 30# |
Correspondência de Fiação: Hu-U, Hv-V, Hw-W
Destaques Adicionais
Versão Aumentada do Rotor RI100: A altura do rotor foi aumentada em 2mm para melhorar a compatibilidade com sensores Hall.
-
Excelência em Enrolamento Manual: Bobinas de cobre enroladas com precisão e 0,5 mm de folga para melhor montagem e alta densidade de torque.
-
Rotor de Ímã Permanente Curvado: Garante características BEMF melhoradas para um melhor controlo sinusoidal.
-
Opções de Encoder Personalizadas: Suporta uma variedade de encoders de alta precisão, incluindo Renishaw e Sick.
-
Engajamento de Engrenagem Otimizado: Projetado com baixo torque de arrasto e excelente dinâmica de engrenagem, garantindo baixo ruído, operação suave e aceleração forte.
Aplicações
-
Braços robóticos colaborativos (Cobot)
-
Exoesqueletos robóticos vestíveis
-
Robôs com pernas/quadrúpedes
-
Juntas robóticas de precisão e efetores finais
-
Sistemas de automação e inspeção compactos
Downloads Manuais
Detalhes
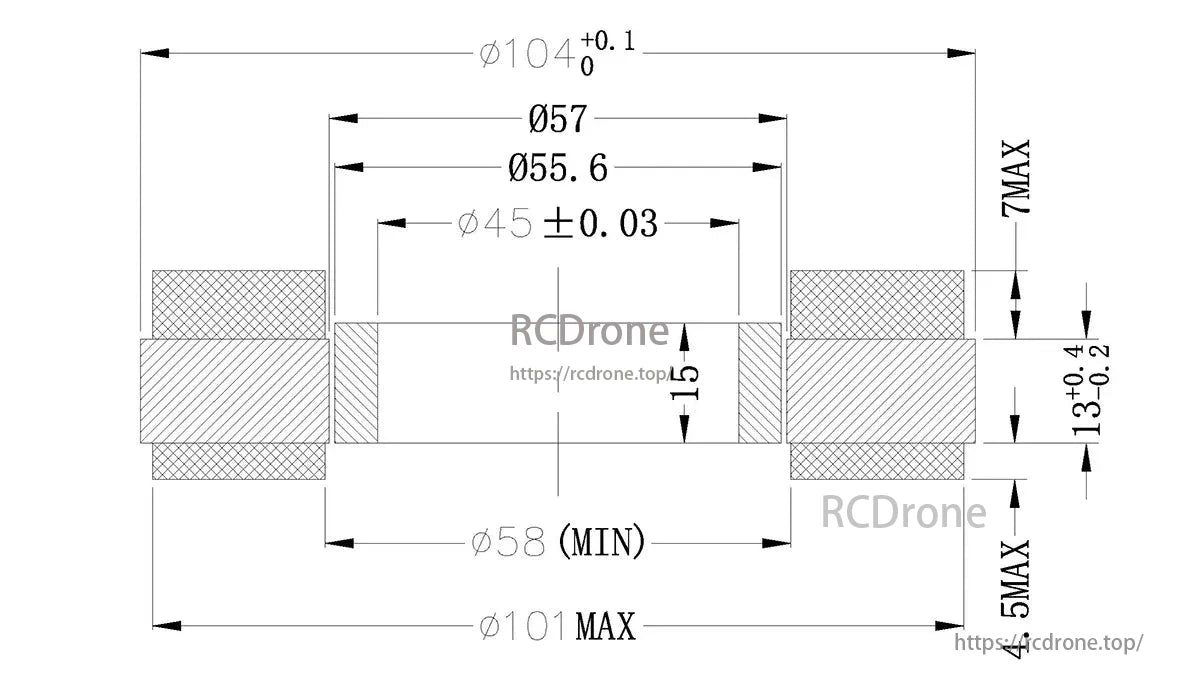
Dimensões do motor de torque CubeMars RI100: Ø104, Ø57, Ø55.6, Ø45, 15mm, Ø58, Ø101.
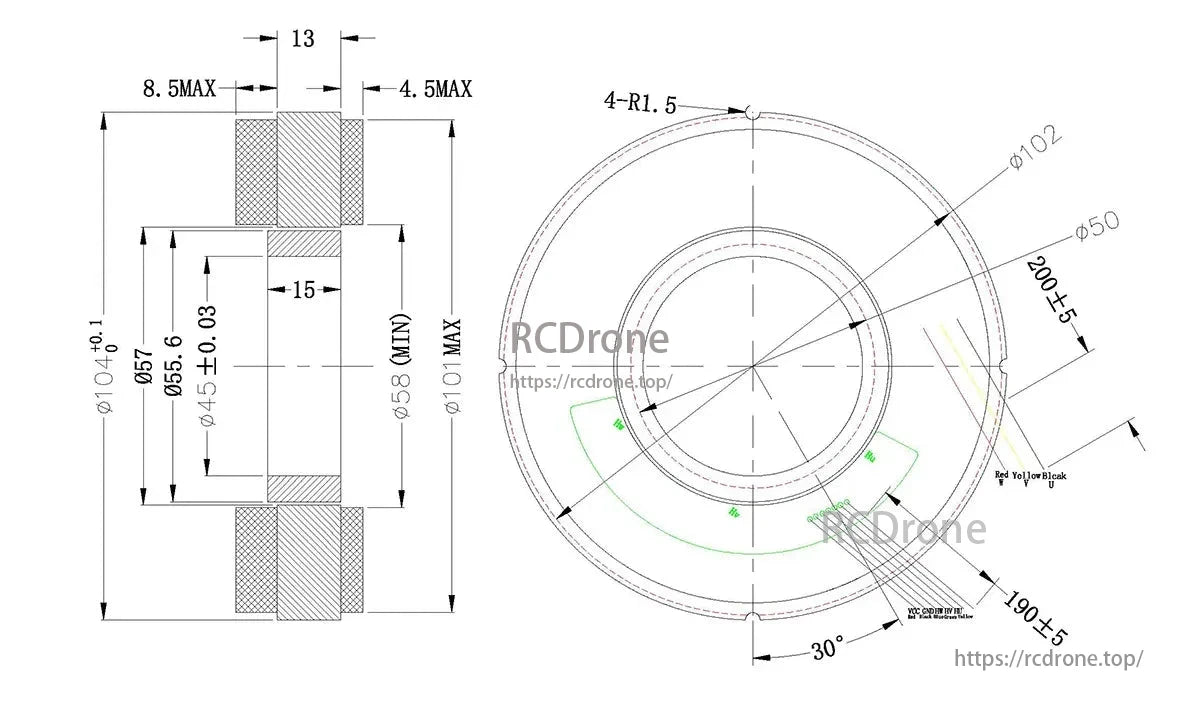
Dimensões do motor de torque: Ø104, Ø57, Ø55.6, Ø45±0.03, Ø58, Ø101 max, 200±5, 190±5, ângulo de 30°, características 4-R1.5.
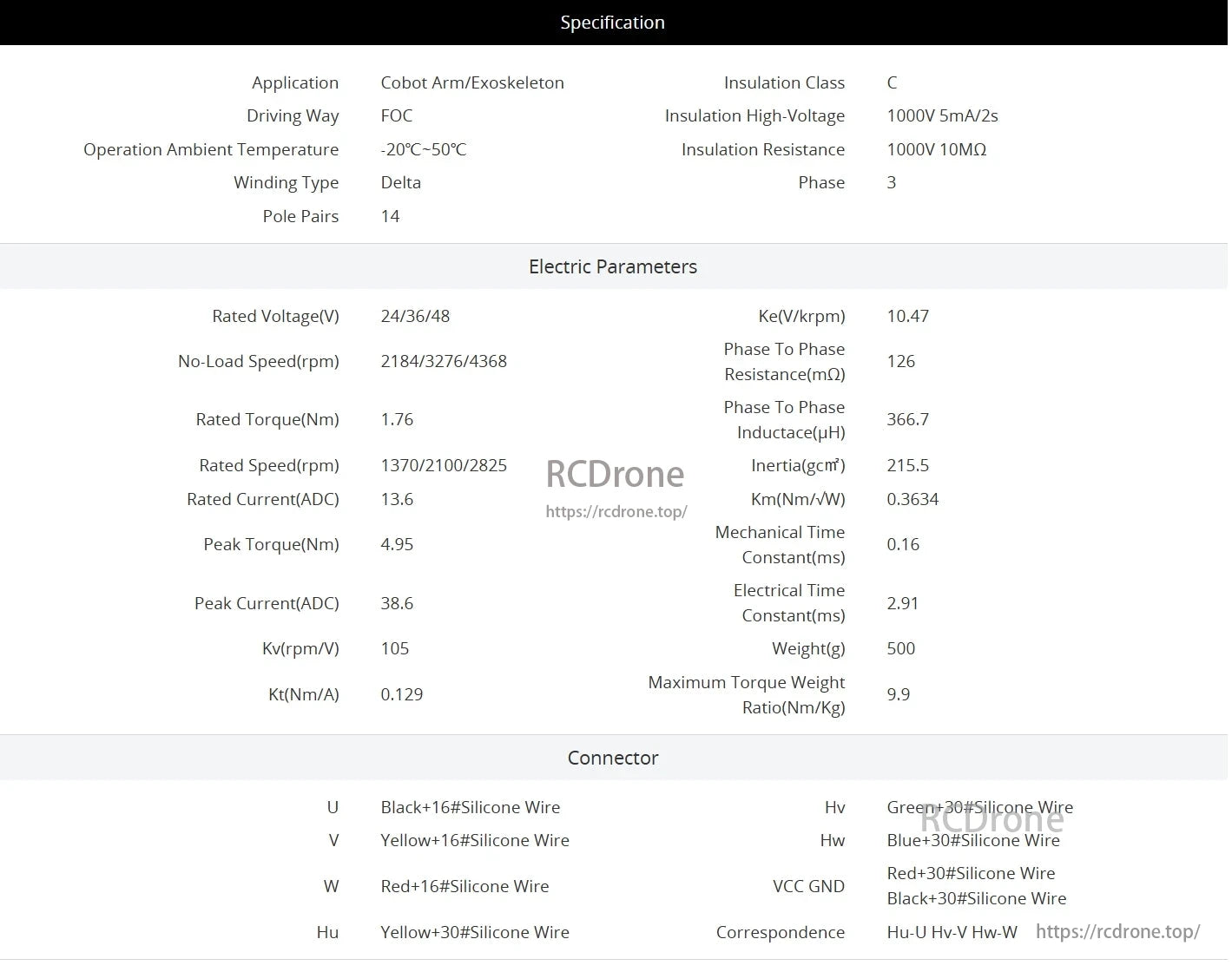
CubeMars Motor de Torque RI100: 24/36/48V, 1.76Nm de torque, 1370/2100/2825rpm, 13.6A de corrente, 38.6A de pico, 10.47V/krpm, 366.7μH de indutância, 215.5gcm² de inércia, relação de peso máximo de torque de 9.9Nm/Kg, operação de -20°C a 50°C.

CubeMars RI100 KV105@24VDC anal gráfico de análise. Exibe torque (N.m) vs. potência de saída (W), eficiência, corrente (A) e velocidade (RPM). O gráfico destaca as características de desempenho do motor sob diferentes cargas.
Motor de Torque CubeMars RI100: Torque de arrasto reduzido, funcionamento suave, baixo ruído, dinâmica forte.
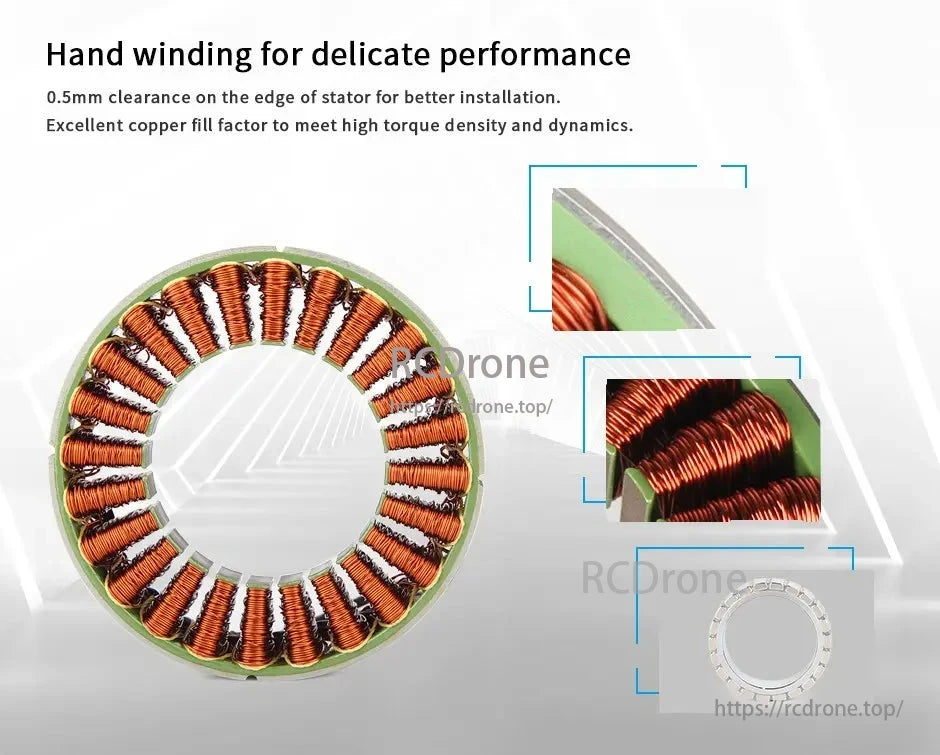
Estator manualmente enrolado com folga de 0,5 mm para desempenho otimizado.

Versão Aumentada do Rotor RI100. Altura total aumentada em 2 mm para melhor detecção do sensor Hall.
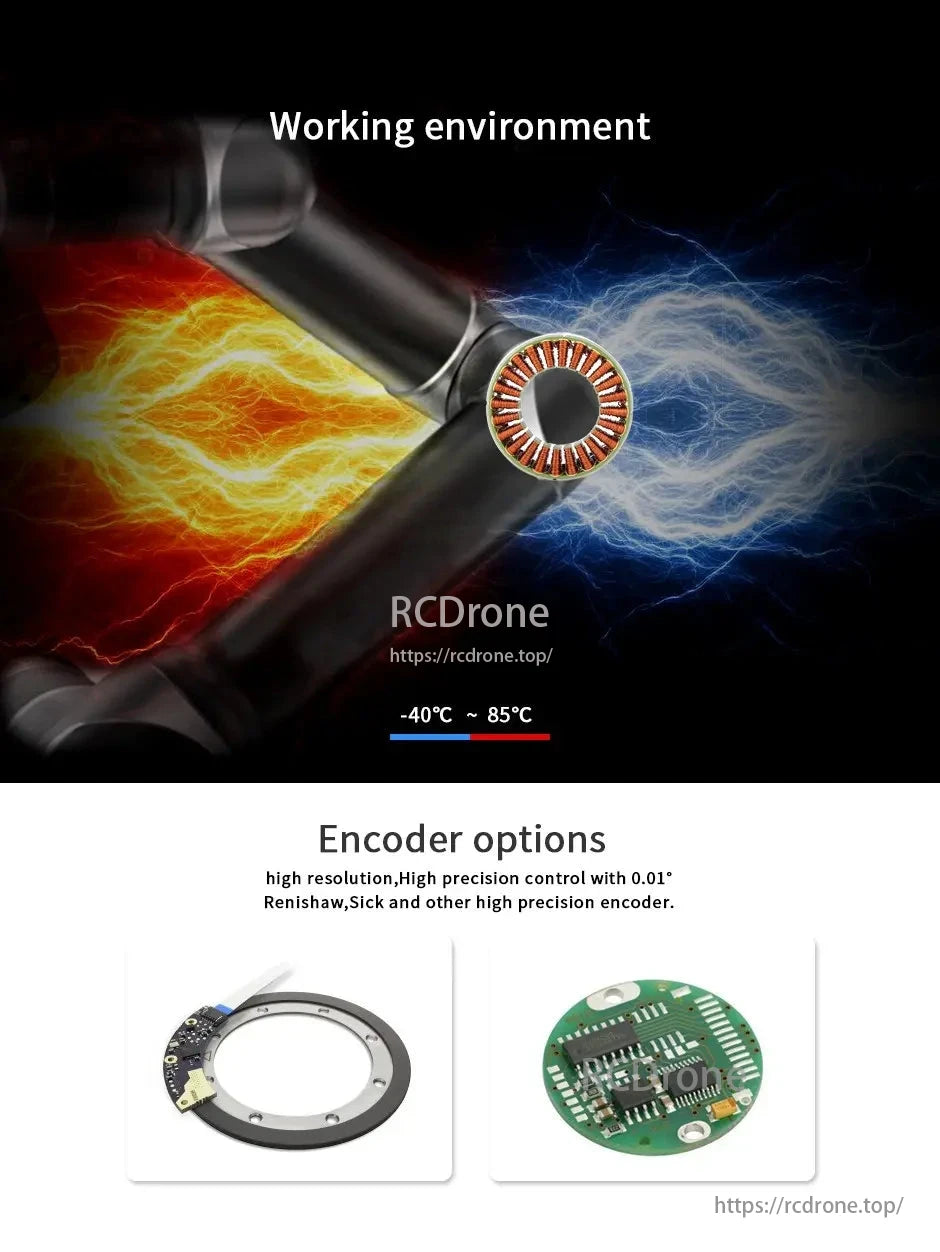
Motor de Torque CubeMars RI100: -40°C a 85°C, opções de encoder de alta precisão.
Related Collections






