




CubeMars RI60 KV120 Motor Torque Sem Carcaça | 0,57Nm, 120KV, 48V BLDC para Cobot & Exoesqueleto
CubeMars RI60 KV120 Motor Torque Sem Carcaça | 0,57Nm, 120KV, 48V BLDC para Cobot & Exoesqueleto
CubeMars
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O Motor de Torque Inrunner Sem Moldura CubeMars RI60 KV120 é projetado para aplicações robóticas compactas e de alto desempenho. Suportando tensões de operação de 24V/36V/48V, este motor BLDC sem moldura oferece alta densidade de torque, movimento suave com baixo cogging, e resolução de controle precisa de 0,01°. Com um diâmetro externo compacto de Φ60mm e peso de apenas 155,9g, é ideal para braços de cobot, exoesqueletos, e juntas robóticas com restrições de espaço apertadas.
Este motor apresenta um estator enrolado à mão para um fator de preenchimento de cobre otimizado, ímãs permanentes curvados para uma resposta BEMF senoidal eficiente, e opções para integração de sensor Hall e encoder. Suporta Controlo Orientado por Campo (FOC), opera de forma fiável de -20°C a 50°C, e suporta até 1.63 Nm de torque de pico. A versão de rotor elevado melhora a precisão do sensor Hall ao aumentar o alcance de deteção em 2mm.
Principais Características
-
Design BLDC Inrunner Sem Quadro – Sem carcaça exterior, ideal para instalações embutidas
-
Densidade de Torque Elevada – Relação máxima de torque para peso de 10.46 Nm/kg
-
Controlo de Precisão – Compatível com codificadores de alta resolução, suporta 0.01° posicionamento
-
Baixo Torque de Cogging – Operação suave, redução de vibração e ruído
-
Tolerante à Temperatura – Funciona em temperaturas ambiente de -20°C a 50°C
-
Múltiplas Interfaces de Controlo – Suporta feedback de encoder e sensor Hall
-
Estator Enrolado à Mão – Excelente preenchimento de cobre, 0.5mm de folga nas bordas para fácil montagem
-
Versão de Rotor Opcional – +2mm de altura do rotor melhora o alinhamento do sensor Hall
Especificações Técnicas
Aplicação & Configuração
| Parâmetro | Valor |
|---|---|
| Aplicação | Braço Cobot / Exoesqueleto |
| Método de Condução | FOC |
| Fase | 3 Fases |
| Tipo de Enrolamento | Delta |
| Pares de Polos | 14 |
| Classe de Isolamento | C |
| Tensão de Isolamento | 500V 5mA/2s |
| Resistência de Isolamento | 500V 10MΩ |
| Temperatura de Operação | -20℃ ~ 50℃ |
Características Elétricas
| Parâmetro | Valor |
|---|---|
| Tensão Nominal (V) | 24 / 36 / 48 |
| Velocidade em Vazio (rpm) | 2532 / 3798 / 5064 |
| Velocidade Nominal (rpm) | 1440 / 2320 / 3190 |
| Torque Nominal (Nm) | 0.57 |
| Torque de Pico (Nm) | 1.63 |
| Corrente Nominal (ADC) | 5.6 |
| Corrente de Pico (ADC) | 16.8 |
| Kv (rpm/V) | 120 |
| Ke (V/krpm) | 9.03 |
| Kt (Nm/A) | 0.100 |
| Resistência de Fase (mΩ) | 900 |
| Indutância de Fase (μH) | 877.5 |
| Inércia (g·cm²) | 33.05 |
| Km (Nm/√W) | 0.1054 |
| Constante de Tempo Mecânica (ms) | 0.3 |
| Constante de Tempo Elétrica (ms) | 0.98 |
| Peso (g) | 155.9 |
| Relação Torque/Peso | 10.46 Nm/kg |
Opções de Encoder & Sensor Hall
-
Com Sensor Hall: Detecção melhorada do rotor, recomendado para deteção de posição de alta precisão
-
Sem Sensor Hall: Design compacto para ambientes restritos
-
Encoders suportados: Renishaw, Sick, outros encoders de alta precisão (0.01° resolução)
Dimensões Mecânicas
| Versão | Diâmetro Externo | Diâmetro Interno | Altura do Rotor | Espessura Máxima |
|---|---|---|---|---|
| Sem Hall | Ø60 mm | Ø30 mm | 15 mm | 21 mm (máx) |
| Com Hall | Ø60 mm | Ø30 mm | 15 mm | 23 mm (máx) |
Consulte os desenhos técnicos para tolerâncias exatas e padrões de furos de montagem.
Ciclo de Desempenho
Testado a 24VDC:
-
Máxima eficiência a ~0.3 Nm
-
Pico de potência de saída >125W a ~1.1 Nm
-
Velocidade máxima ~2500 RPM
-
Resposta de corrente estável em toda a gama de torque
Informação sobre Fiação & Conectores
| Fio | Cor + Tamanho |
|---|---|
| U | Preto + Silicone 18# |
| V | Amarelo + Silicone 18# |
| W | Vermelho + Silicone 18# |
| Hu | Azul + Silicone 30# |
| Hv | Verde + Silicone 30# |
| Hw | Amarelo + Silicone 30# |
| VCC | Vermelho + Silicone 30# |
| GND | Preto + Silicone 30# |
Mapa de Ligação:
Hu-U, Hv-V, Hw-W
Transferências de Manuais
![]() RI60 com sensor de hall-2D.pdf
RI60 com sensor de hall-2D.pdf
![]() RI60 sem sensor de hall-3D.zip
RI60 sem sensor de hall-3D.zip
![]() RI60 com sensor de hall-3D.zip
RI60 com sensor de hall-3D.zip
Aplicações
-
Braços robóticos colaborativos
-
Juntas de exoesqueleto
-
Robôs com pernas e quadrúpedes
-
Robótica médica de precisão
-
Módulos de servo embutidos
Detalhes
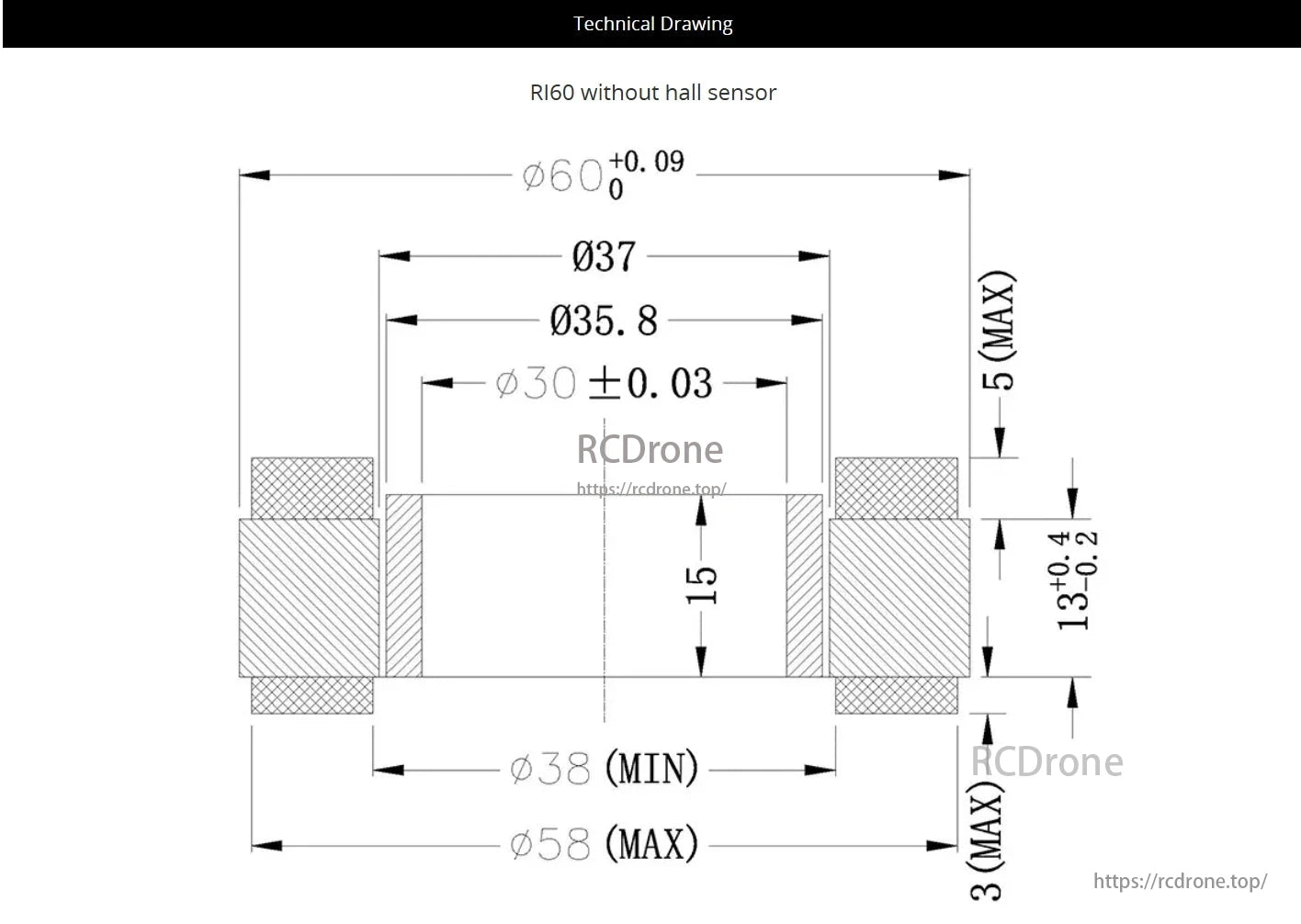
CubeMars Dimensões do motor RI60: Ø60, Ø37, Ø35.8, Ø30, Ø38 (mín), Ø58 (máx), 15 de comprimento, 5 de altura máxima, 13 ±0.4 largura.
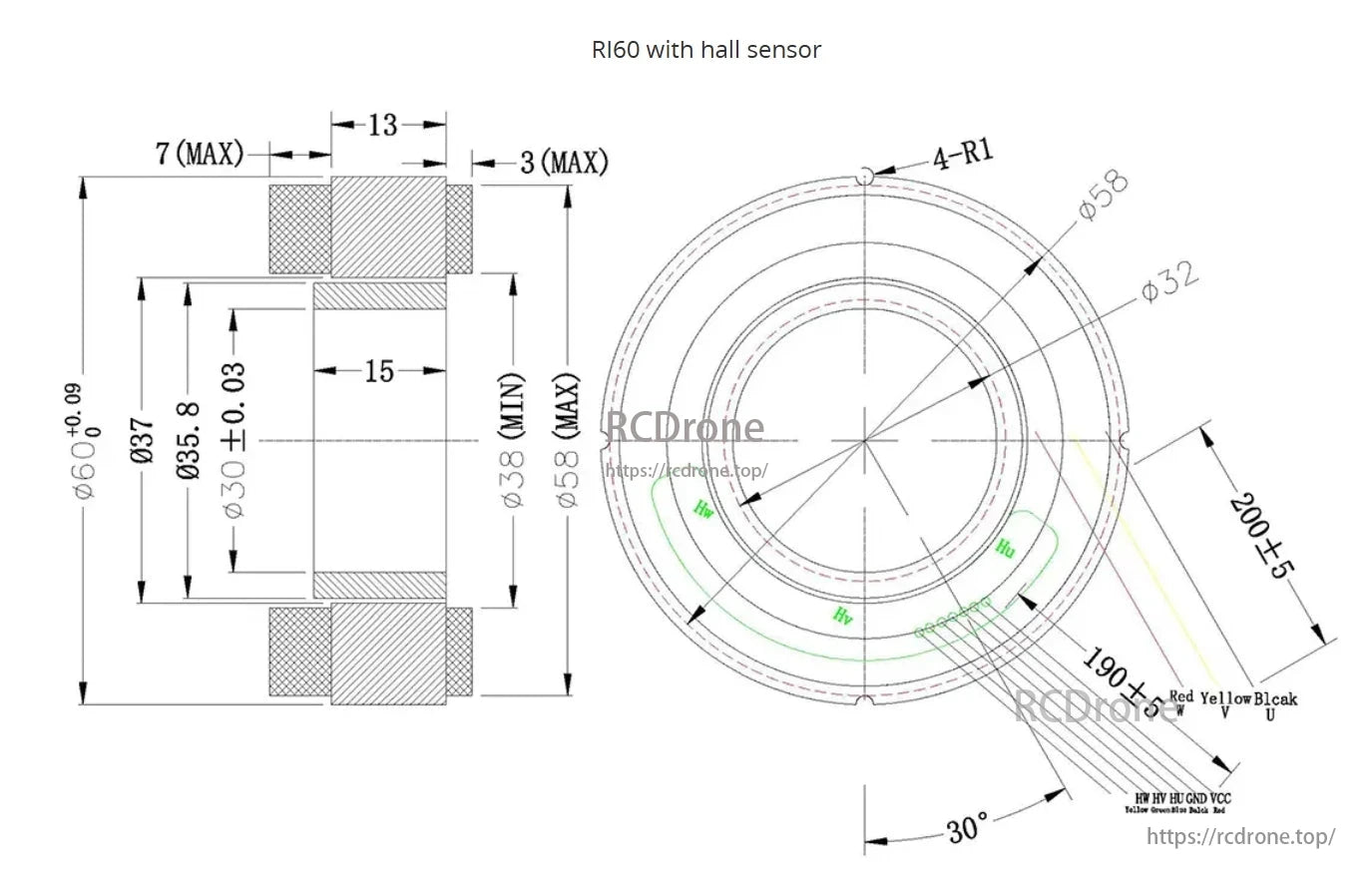
Motor CubeMars RI60 com sensor Hall. Dimensões: 60mm de diâmetro, 200mm de comprimento. Apresenta marcas de 4-R1, φ58, φ32 e ângulos de 30°. Inclui rótulos HW, HV, HU.
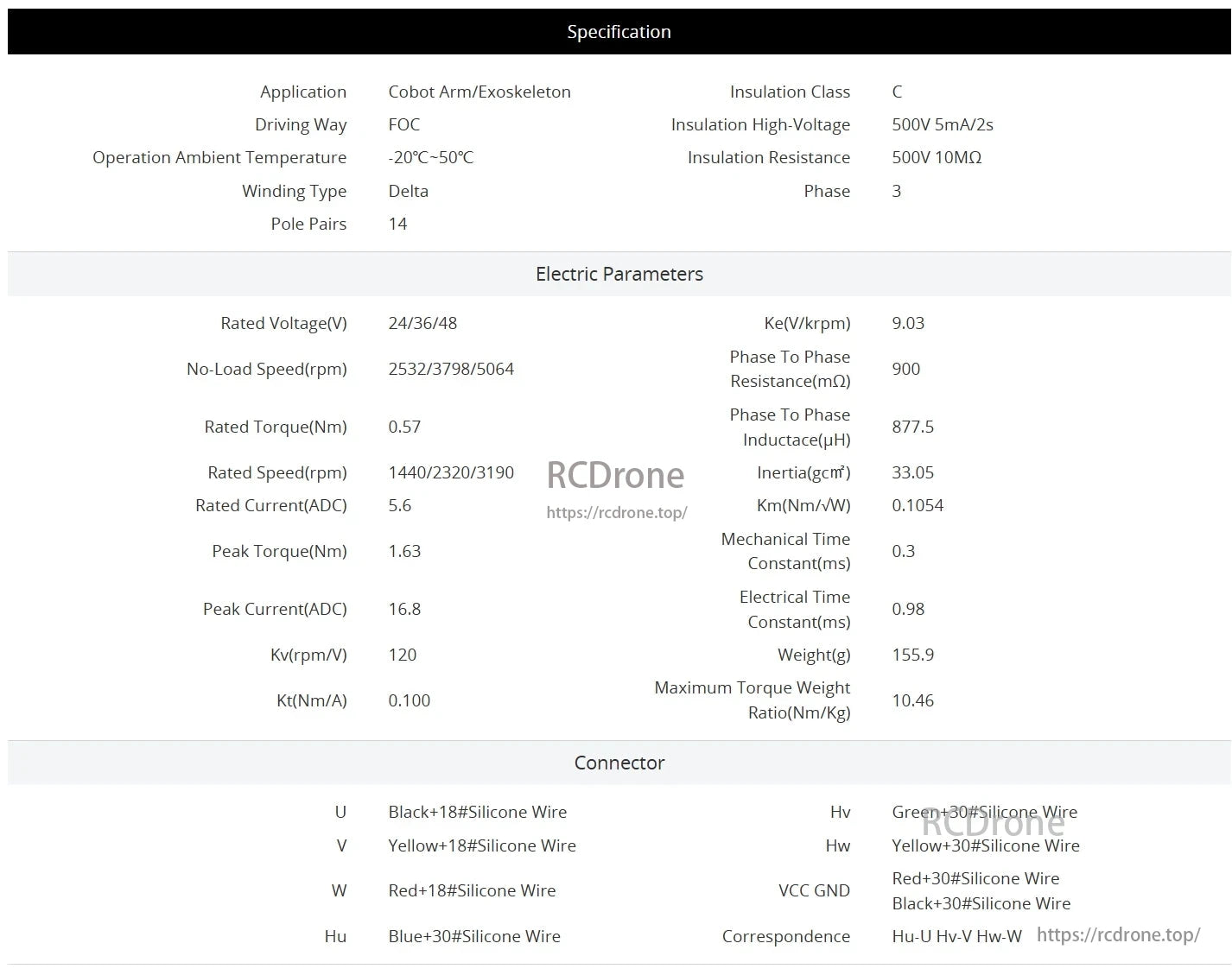
Motor CubeMars RI60: aplicação em braço cobot/exoesqueleto, condução FOC, operação de -20°C a 50°C, 14 pares de polos. Tensão nominal 24/36/48V, velocidade sem carga 2532/3798/5064rpm, torque nominal 0.57Nm, torque de pico 1.63Nm.
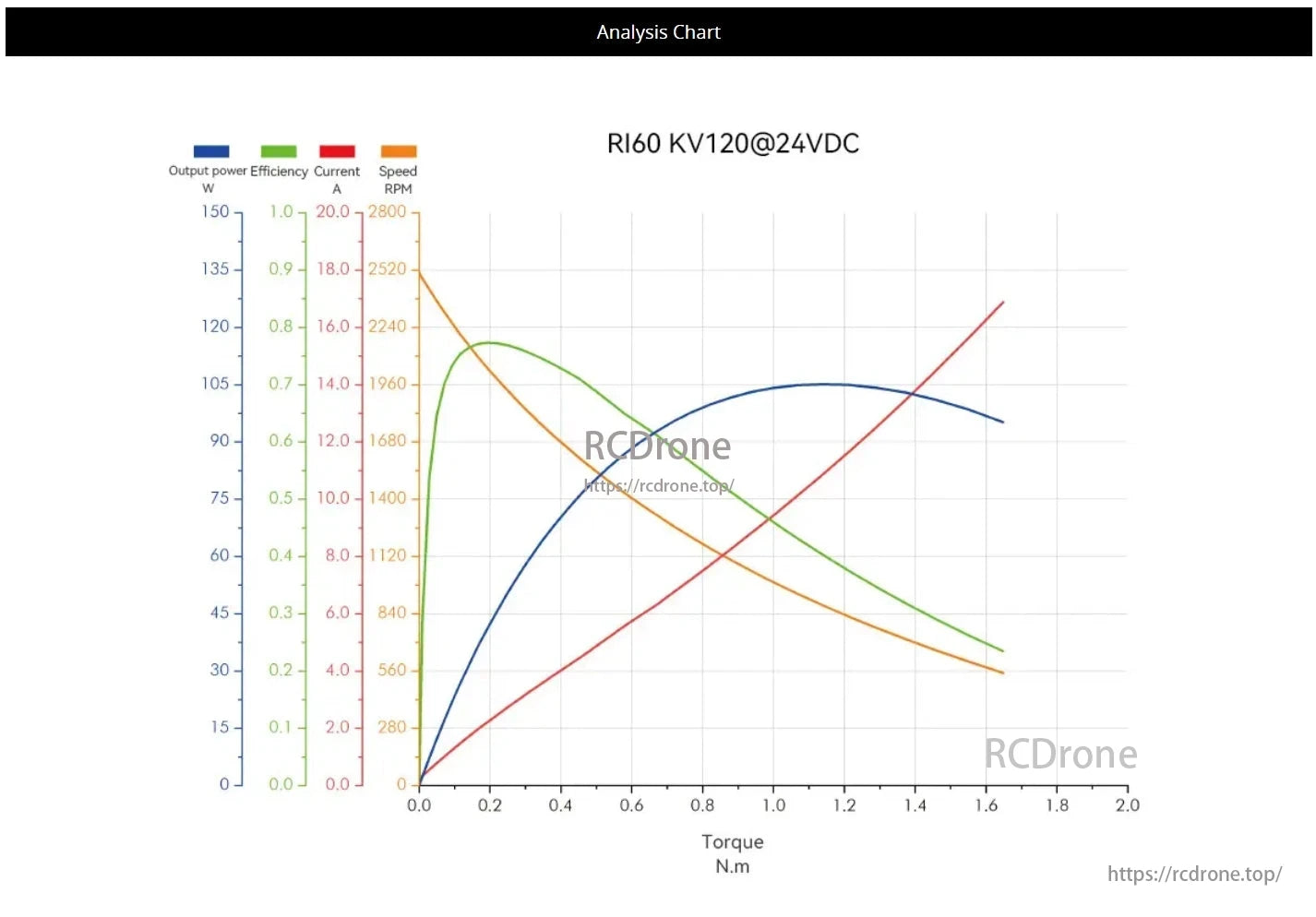
Gráfico de análise do motor CubeMars RI60 em KV120@24VDC. Dispapresenta potência de saída, eficiência, corrente e velocidade em relação ao torque. A eficiência atinge o pico perto de 0.2 N.m, com a velocidade a diminuir à medida que o torque aumenta.
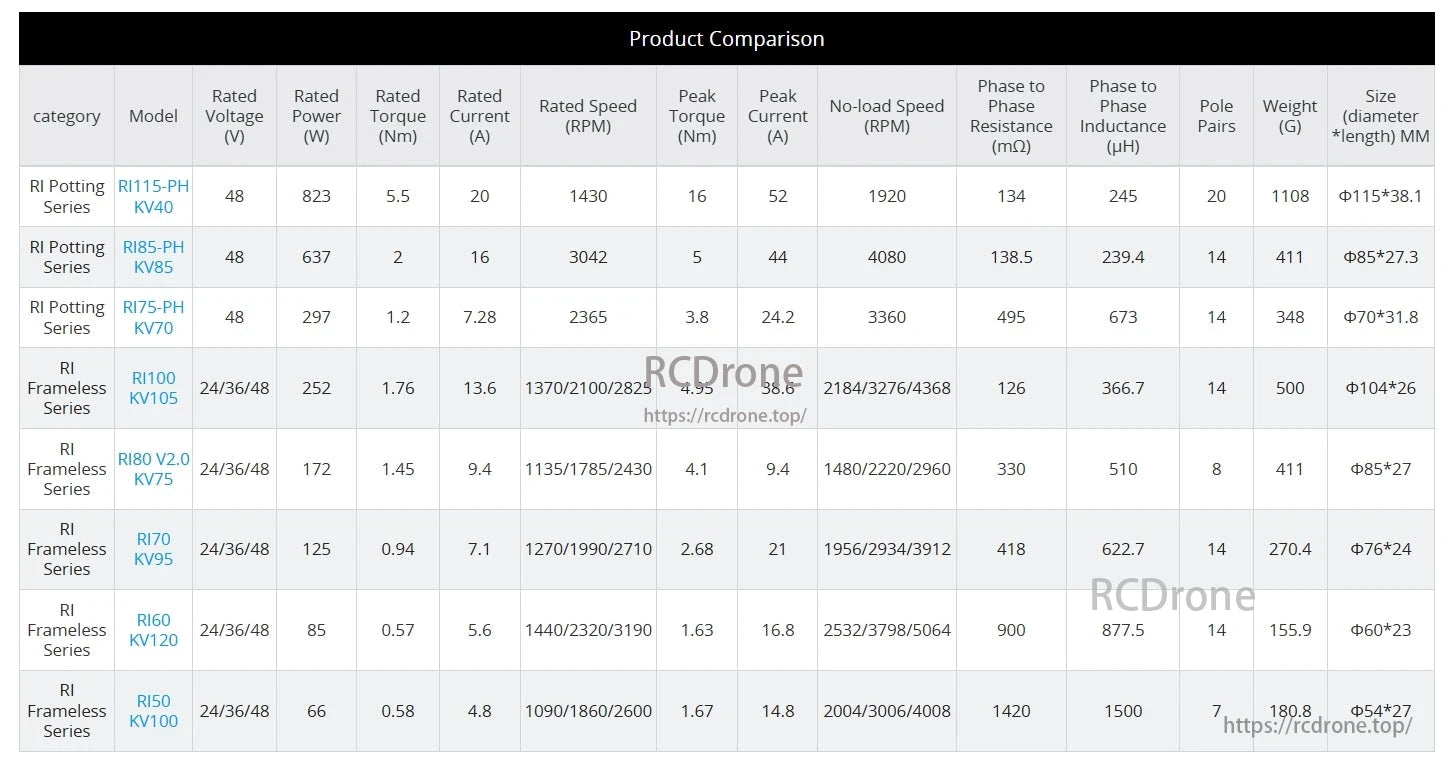
Motor CubeMars RI60 KV120: 24/36/48V, 85W, torque de 0.57Nm, corrente de 5.6A, velocidade de 1440/2320/3190 RPM, torque de pico de 1.63Nm, corrente de pico de 16.8A, resistência de 900mΩ, indutância de 877.5µH, 14 pares de polos, peso de 155.9g, tamanho φ60*23mm.

Motor CubeMars RI60: Torque de arrasto reduzido, funcionamento suave, baixo ruído, dinâmica forte.

Estator manualmente enrolado com folga de 0,5 mm para desempenho otimizado.

Íman permanente curvado para design de motor BEMF Sinus, garantindo fácil controlo.

Versão Aumentada do Rotor RI60. Altura total aumentada em 2 mm para melhor deteção do sensor Hall.
Motor CubeMars RI60: -40°C a 85°C, opções de encoder de alta resolução.
Related Collections




