




CubeMars RI70 KV95 Motor Torque Sem Carcaça | 24–48V, 2,68Nm Pico, 270g, Pronto para Cobot/Exoesqueleto
CubeMars RI70 KV95 Motor Torque Sem Carcaça | 24–48V, 2,68Nm Pico, 270g, Pronto para Cobot/Exoesqueleto
CubeMars
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O CubeMars RI70 KV95 é um motor de torque inrunner sem estrutura de alto desempenho, especificamente projetado para braços robóticos colaborativos, exoesqueletos e outras aplicações robóticas de precisão. Operando entre 24V e 48V, oferece um torque de pico de 2.68 Nm, um torque nominal de 0.94 Nm, e suporta operação em alta velocidade de até 3912 RPM. O motor RI70 apresenta menor torque de arrasto, controle de ultra-alta resolução de 0.01°, e uma arquitetura compacta sem estrutura, oferecendo integração flexível em vários designs estruturais. Disponível em duas versões—com ou sem sensor Hall—suporta aplicações de alta precisão que requerem feedback em tempo real e dinâmicas adaptativas.
Principais Características
-
Tensão Nominal: 24V / 36V / 48V
-
Avaliação KV: 95 rpm/V
-
Torque de Pico: 2.68 Nm
-
Alta Precisão: compatibilidade com encoder de 0.01° (Renishaw, Sick, etc.)
-
Baixo Torque de Cogging: Permite operação suave e de baixo ruído
-
Design Inrunner Sem Quadro: Compacto, leve (270.4g), e fácil de integrar
-
Suporta FOC (Controlo Orientado ao Campo)
-
Intervalo de Temperatura de Trabalho: -20°C a 50°C
-
Alto Fator de Preenchimento de Cobre & Ímanes Permanentes Curvados: Para uma densidade de torque melhorada
-
Versão Opcional de Rotor Aumentada: +2mm para deteção otimizada do sensor Hall
Desenhos Mecânicos
RI70 Sem Sensor Hall:
-
Diâmetro Externo: Ø76 mm (+0.08/-0.02)
-
Furo do Eixo Interno: Ø38 ±0.03 mm
-
Comprimento do Corpo: 15 mm
-
Comprimento Total Máximo: 73 mm
-
Profundidade de Montagem: 6.5 mm (máx)
RI70 Com Sensor Hall:
-
Altura do rotor aumentada em 2mm
-
PCB integrado com layout de ângulo para fios de sinal Hall
-
Espaço adicional para montagem: 13 mm
-
Comprimento do cabo: 190 ± 5 mm
Especificações Elétricas
| Parâmetro | Valor |
|---|---|
| Tensão Nominal (V) | 24 / 36 / 48 |
| Velocidade sem Carga (RPM) | 1956 / 2934 / 3912 |
| Velocidade Nominal (RPM) | 1270 / 1990 / 2710 |
| Torque Nominal (Nm) | 0.94 |
| Torque de Pico (Nm) | 2.68 |
| Corrente Nominal (ADC) | 7.1 |
| Corrente de Pico (ADC) | 21 |
| Resistência de Fase (mΩ) | 418 |
| Indutância de Fase (µH) | 622.7 |
| Ke (V/krpm) | 11.69 |
| Kt (Nm/A) | 0.130 |
| Kv (rpm/V) | 95 |
| Inércia (g·cm²) | 92.15 |
| Km (Nm/√W) | 0.2011 |
| Constante de Tempo Mecânica (ms) | 0.23 |
| Constante de Tempo Elétrica (ms) | 1.49 |
| Peso (g) | 270.4 |
| Relação Torque-Peso | 9.91 Nm/kg |
Detalhes de Fiação & Conectores
| Sinal | Cor do Fio | Bitola do Fio |
|---|---|---|
| U | Preto | Silicone 16# |
| V | Amarelo | Silicone 16# |
| W | Vermelho | Silicone 16# |
| Hu | Azul | Silicone 30# |
| Hv | Verde | Silicone 30# |
| Hw | Azul | Silicone 30# |
| VCC | Vermelho | Silicone 30# |
| GND | Preto | Silicone 30# |
Correspondência de Fiação do Encoder:
Hu → U, Hv → V, Hw → W
Curva de Desempenho (RI70 KV95 @ 24VDC)
-
Eficiência máxima alcançada em torno de 0.3 Nm torque
-
A potência de saída atinge ~220W a 2.6 Nm
-
Óptimo para ambientes de controlo dinâmico suave, de alta velocidade e baixa carga
Destaques da Construção
-
Estator Enrolado à Mão: Para alta densidade de torque e resposta dinâmica
-
Ímanes Permanentes Curvados: Projetados para controlo de BEMF sinusoidal
-
0.5mm Espaçamento: Facilita a montagem precisa e o fluxo de ar
-
Amplitude de Funcionamento Ampla: Suporta temperaturas ambiente de -20°C a +50°C
-
Rotor Elevado Opcional: Melhora o acoplamento magnético quando utilizado com sensores Hall
Aplicações
-
Juntas de Robô Colaborativo (Cobot)
-
Atuadores de Exoesqueleto
-
Braços Industriais de Precisão
-
Robótica de Reabilitação e Assistência
-
Plataformas de Pesquisa e Educação
Compatibilidade com Encoder (Opcional)
-
Opções de encoder absoluto de alta resolução (e.g., Renishaw, Sick)
-
Resolução até 0.01°
-
Apoio de montagem do encoder integrado na geometria do motor
Detalhes

Dimensões do motor CubeMars RI70: Ø76, Ø47, Ø45.8, Ø38, Ø48 (mínimo), Ø73 (máximo), 15 de comprimento, 6.5 de altura máxima.

Dimensões do motor CubeMars RI70: 76mm de altura, 73mm de diâmetro. Possui sensor Hall, 4 furos R1.5, 200±5mm de comprimento, 190±5mm de largura e ângulo de 25°.

Motor CubeMars RI70: Aplicação em braço cobot/exoesqueleto, condução FOC, operação de -20°C a 50°C, 14 pares de polos. Tensão nominal 24/36/48V, velocidade sem carga 1956/2934/3912 rpm, torque nominal 0.94Nm, torque de pico 2.68Nm. Peso 270.4g.
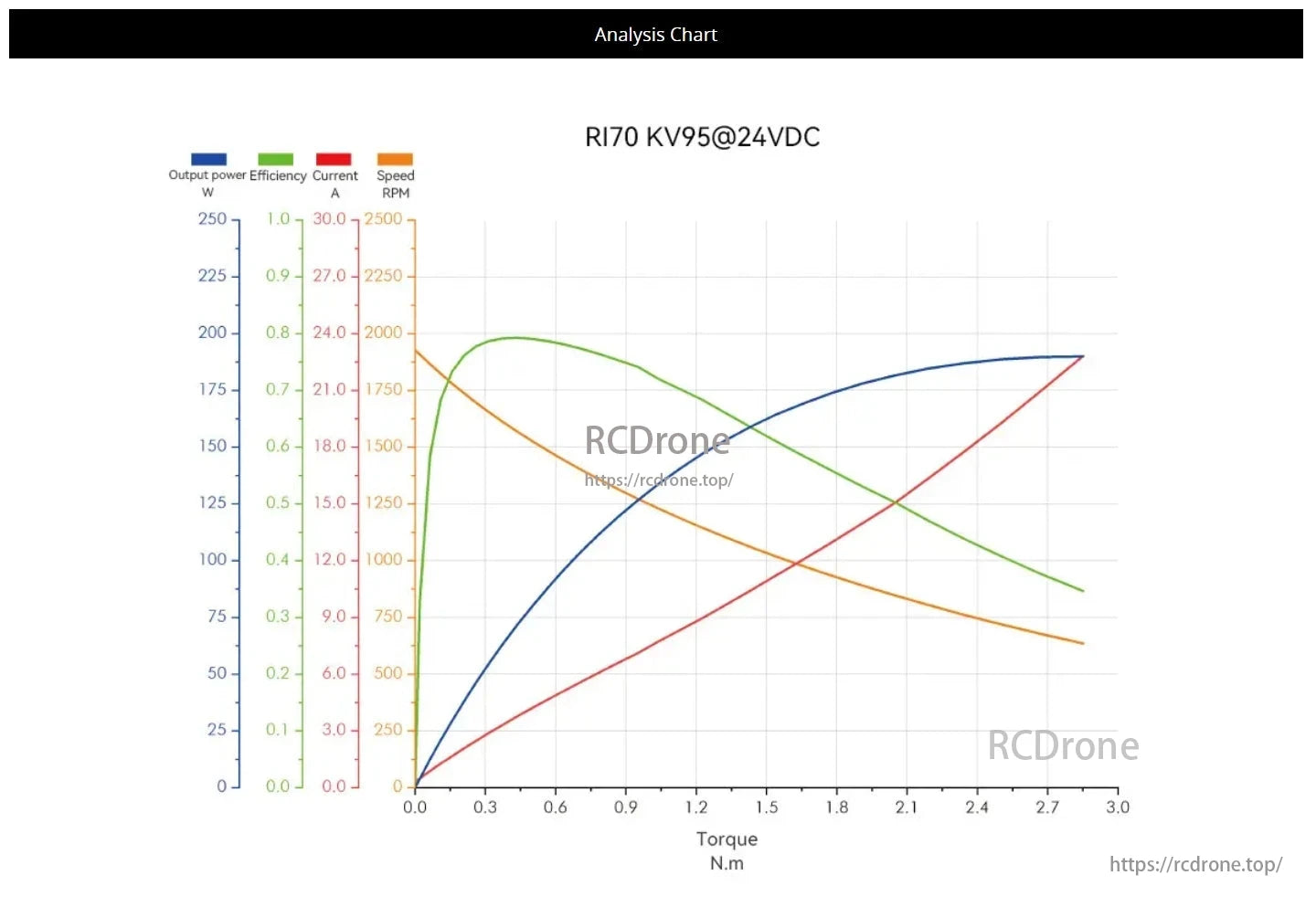
Gráfico de Análise para RI70 KV95@24VDC motor. Exibe potência de saída, eficiência, corrente e velocidade em relação ao torque. O gráfico destaca métricas de desempenho sob condições variadas.

CubeMars Motor RI70: Torque de arrasto reduzido, funcionamento suave, baixo ruído, dinâmica forte.

Estator manualmente enrolado com folga de 0,5 mm para alta densidade de torque.

Design do motor sinusoidal de ímã permanente curvado para fácil controlo.

Versão Aumentada do Rotor RI70: Altura total aumentada em 2 mm para melhor deteção do sensor Hall.

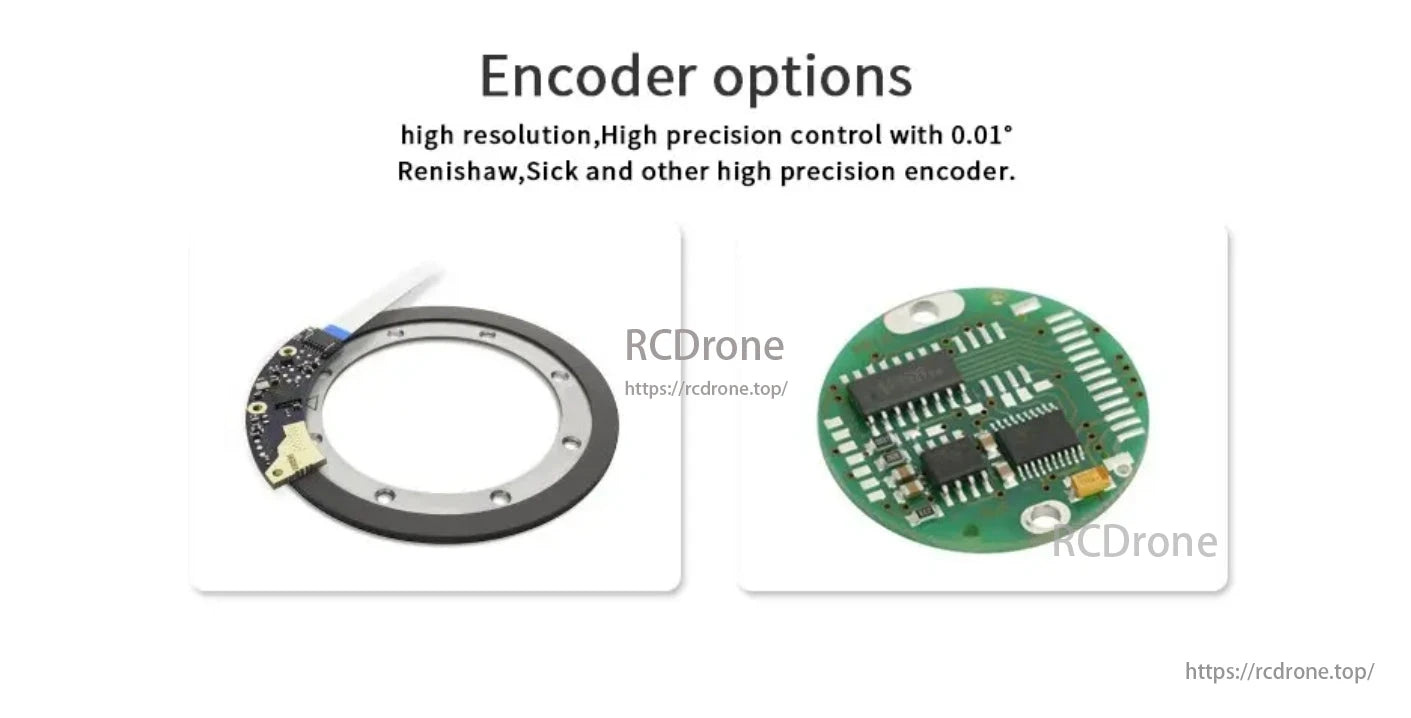
Opções de encoder: Controlo de alta resolução e alta precisão com precisão de 0,01°. Inclui encoders de alta precisão Renishaw, Sick e outros.
Related Collections




