



DAMIAO DM-2325 Motor Robot 24 V, 380 rpm, 5 N·m com Redutor 1:25, CAN/FD CAN e Encoder Incremental
DAMIAO DM-2325 Motor Robot 24 V, 380 rpm, 5 N·m com Redutor 1:25, CAN/FD CAN e Encoder Incremental
DAMIAO
Preço normal
$45.00 USD
Preço normal
Preço de saldo
$45.00 USD
Preço unitário
por
Impostos incluídos.
Envio calculado na finalização da compra.
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O DAMIAO DM-2325 é um Motor Robot compacto projetado para controle de movimento preciso em robótica. Possui feedback de encoder incremental, interfaces de controle CAN/FD CAN e configuração UART. Com uma relação de redução de 1:25, alimentação de 24 V e modos de controle definidos, é adequado para aplicações que requerem regulação de velocidade e posição confiável.
Principais Características
- Modelo: DM-2325
- Tensão nominal: 24 V
- Corrente nominal: 5 A / 3.2 A; Corrente de pico: 13 A / 7.5 A
- Torque nominal: 5 N·m; Torque de pico: 2 N·m
- Velocidade nominal: 380 rpm; Velocidade máxima sem carga: 560 rpm
- Relação de redução: 1:25; Pares de polos: 7
- Indutância de fase: 75 μH; Resistência de fase: 0.2915 Ω
- Carga radial máxima: 395 N
- Dimensões: 28 mm de diâmetro externo; 77.6 mm de altura
- Peso do motor: 172.
- 2 g
- Tipo de encoder: Encoder incremental
- Interface de controlo: CAN@1 Mbps (Máx), FD CAN@5 Mbps (Máx)
- Interface de configuração: UART@921600 bps
- Modos de controlo: Modo MIT, Modo de Velocidade, Modo de Posição
Especificações
| Modelo | DM-2325 |
| Tensão Nominal | 24 V |
| Corrente Nominal | 5 A / 3.2 A |
| Corrente de Pico | 13 A / 7.5 A |
| Torque Nominal | 5 N·m |
| Torque de Pico | 2 N·m |
| Velocidade Nominal | 380 rpm |
| Velocidade Máx. em vazio | 560 rpm |
| Relação de Redução | 1:25 |
| Pares de Polos | 7 |
| Indutância de Fase | 75 μH |
| Resistência de Fase | 0.html 2915 Ω |
| Carga Radial Máxima | 395 N |
| Diâmetro Externo | 28 mm |
| Altura | 77.6 mm |
| Peso do Motor | 172.2 g |
| Tipo de Encoder | Encoder incremental |
| Interface de Controle | CAN@1 Mbps (Máx), FD CAN@5 Mbps (Máx) |
| Interface de Configuração | UART@921600 bps |
| Modos de Controle | Modo MIT; Modo de Velocidade; Modo de Posição |
Proteção
- Proteção contra sobretemperatura do motor; temperatura de proteção: 120 °C. A sobretemperatura sai do "modo de habilitação".
- Proteção contra sobretemperatura do motor; definida conforme os requisitos de uso (recomendado não exceder 100 °C). A sobretemperatura sai do "modo de habilitação".
- Proteção contra sobrevoltagem do motor; definida conforme os requisitos de uso (recomendado não exceder 60 V). A sobrevoltagem sai do "modo de habilitação". html
- Proteção contra perda de comunicação; se nenhum comando CAN for recebido dentro do período definido, o sistema sai do "modo de ativação".
- Proteção contra sobrecorrente do motor; definido conforme os requisitos de uso (recomendado não exceder 13 A). A sobrecorrente sai do "modo de ativação".
- Proteção contra subtensão do motor; se a tensão de alimentação for inferior ao valor definido, sai do "modo de ativação" (tensão de alimentação não inferior a 15 V).
Aplicações
- Robôs Humanoides
- Braços Robóticos
- Exoesqueletos
- Robôs Quadrúpedes
- Veículos AGV
- Robôs ARU
Manuais e Downloads
- DM_2325_Motor.stp
- DM_2325_Motor_armature.stp
- DM-2325_desenho_instalação.pdf
- DM-2325_desenho_instalação_armadura.pdf
Desenho de Instalação
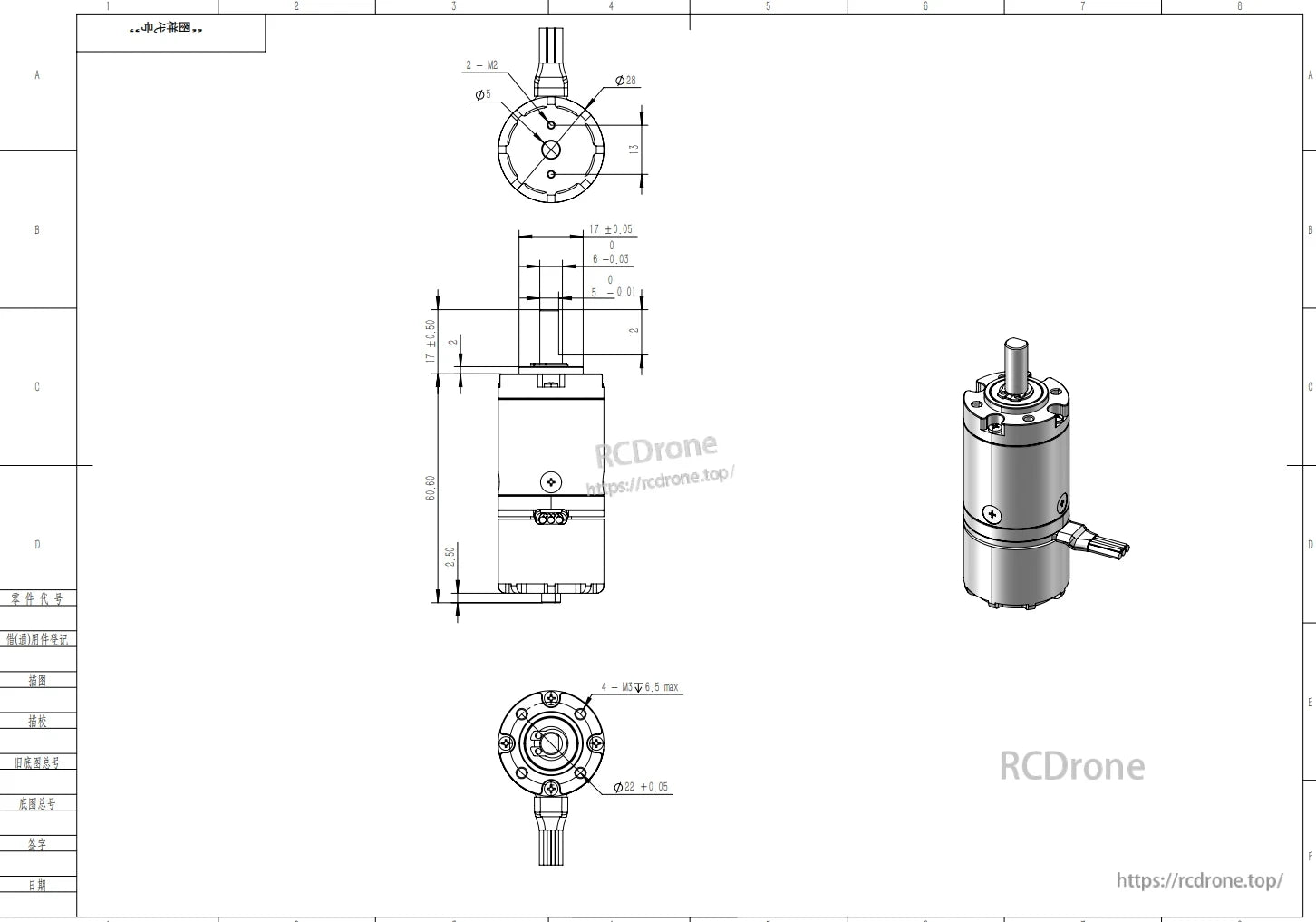
Desenho técnico do motor robô com dimensões e especificações
Desenho técnico do motor de robô com dimensões e especificações

Desenho técnico do motor de robô com dimensões e vista 3D
Related Collections




- Escolher uma seleção resulta numa atualização de página completa.
- Abre numa nova janela.