




DFRobot SEN0142 MPU6050 Módulo IMU Giroscópio e Acelerómetro 6 DOF com Processador de Movimento Digital I2C para Arduino & Robótica
DFRobot SEN0142 MPU6050 Módulo IMU Giroscópio e Acelerómetro 6 DOF com Processador de Movimento Digital I2C para Arduino & Robótica
DFRobot
Não foi possível carregar a disponibilidade de recolha
Visão Geral
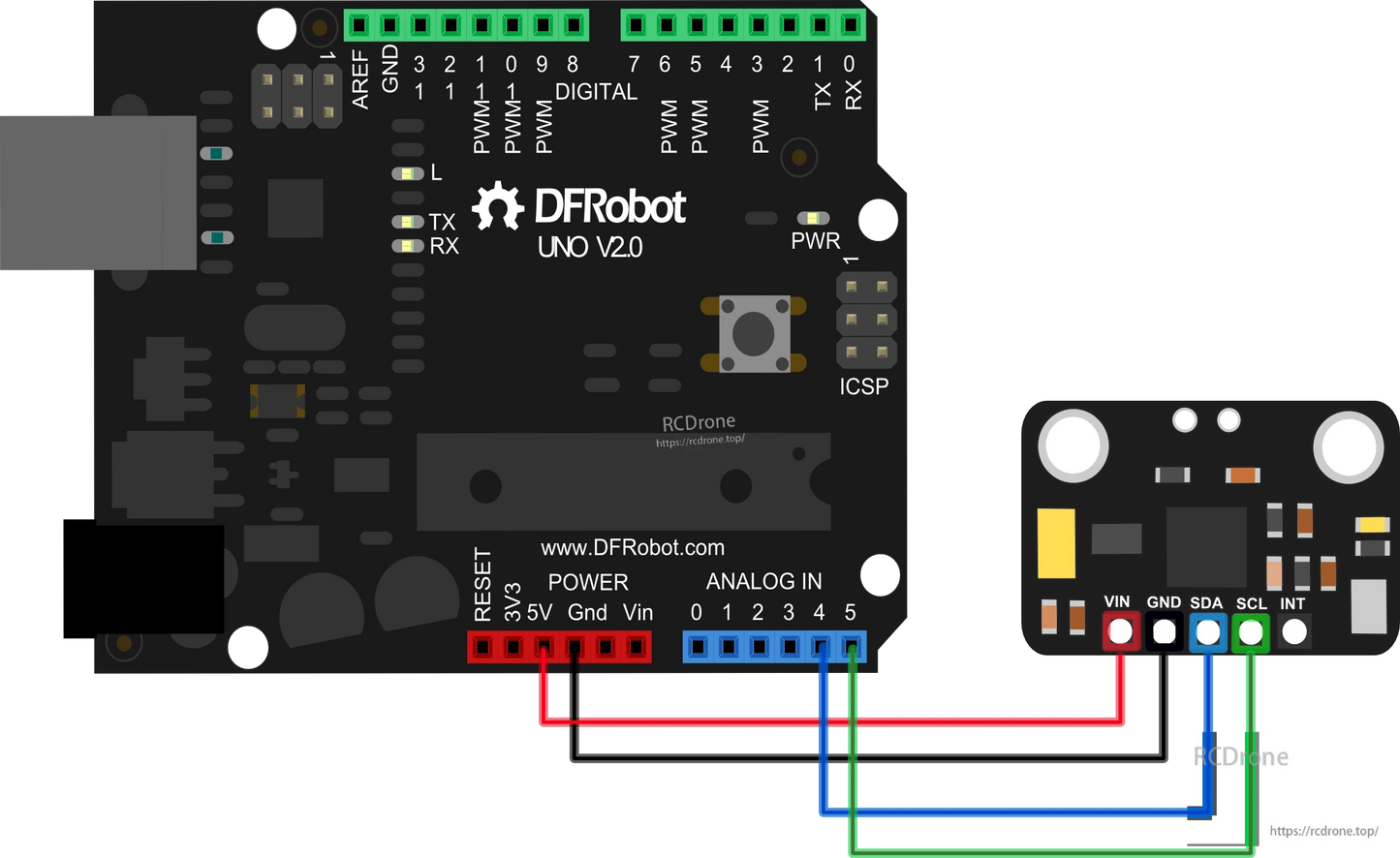
O DFRobot SEN0142 MPU6050 módulo IMU 6 DOF integra um giroscópio de 3 eixos e um acelerómetro de 3 eixos num único chip, proporcionando uma detecção de movimento precisa para robótica, drones, dispositivos vestíveis e projetos Arduino. Com um Processador de Movimento Digital (DMP), suporta algoritmos avançados de fusão de movimento de 6 eixos e 9 eixos, permitindo a saída de dados em quaternion, ângulo de Euler e dados brutos do sensor. Com uma ampla faixa de tensão de entrada de 3V–5V, o MPU6050 pode ser conectado diretamente ao Arduino e a outros microcontroladores para rastreamento de movimento em tempo real e detecção de gestos.
Principais Características
-
Combina giroscópio de 3 eixos e acelerómetro de 3 eixos num único chip
-
Intervalo do acelerómetro programável: ±2g, ±4g, ±8g, ±16g
-
Sensibilidade do giroscópio: ±250, ±500, ±1000, ±2000 dps
-
Processador de Movimento Digital (DMP) para fusão de movimento e reconhecimento de gestos a bordo
-
Interface digital I2C suporta formatos de matriz, quaternão, Euler e dados brutos
-
Calibração de viés & bússola incorporada para maior precisão
-
Compatível com Arduino e eletrónica vestível via I2Cdevlib
Especificações
-
Tensão de Trabalho: 3–5 V
Saída: Dados de MotionFusion digital I2C (6/9-eixos)
-
Acelerómetro: Faixa programável de ±2g / ±4g / ±8g / ±16g
-
Giroscópio: Sensibilidade de ±250 / ±500 / ±1000 / ±2000 dps
-
Formato de Dados: Matriz de rotação, quaternão, ângulo de Euler, dados brutos
-
Dimensões: 14 × 21 mm
Aplicações
-
Sensoriamento de movimento em robótica
-
Projetos de eletrónica Arduino &e DIY
-
Interação Humano-Computador (HCI)
-
Dispositivos vestíveis e controlo por gestos
-
Sistemas de navegação e equilíbrio (e.g., Transportadores do tipo Segway)
-
Estabilização de drones e rastreamento de movimento
Detalhes



Código de Exemplo
Por favor, faça o download das bibliotecas para todos os sensores IMU primeiro!




- Escolher uma seleção resulta numa atualização de página completa.
- Abre numa nova janela.