Kit de desenvolvimento de drone programável Raspberry Pi F450-4B - Pixhawk DIY Ardupilot Industrial Open Source Drone Platforms
Kit de desenvolvimento de drone programável Raspberry Pi F450-4B - Pixhawk DIY Ardupilot Industrial Open Source Drone Platforms
RCDrone
Não foi possível carregar a disponibilidade de recolha
Visão geral
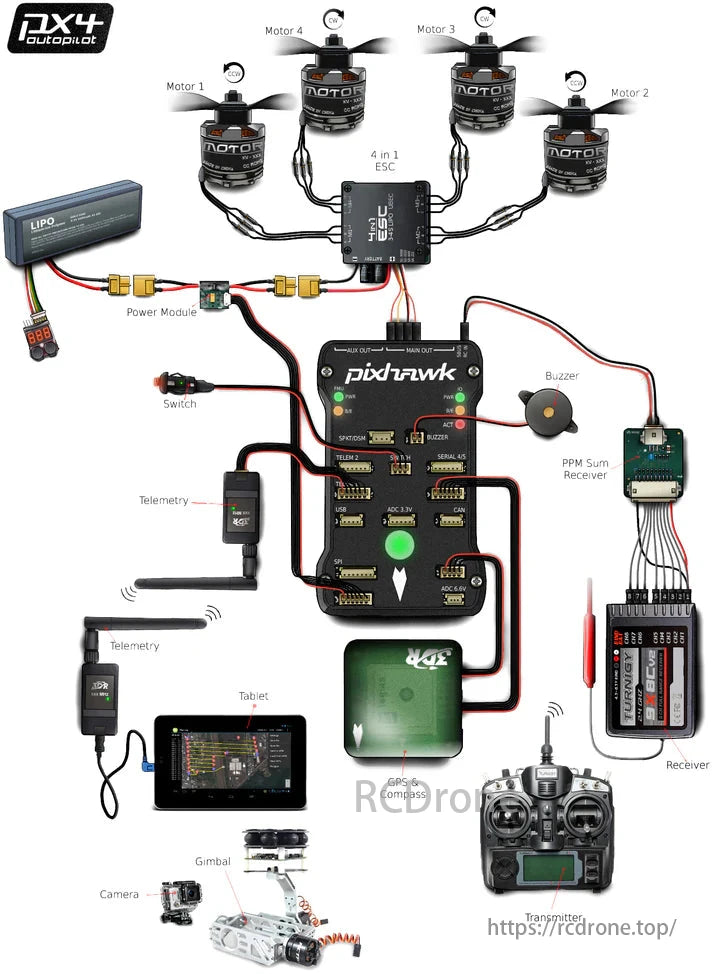
O F450-4B Drone Raspberry Pi é um avançado Kit de drone faça você mesmo que combina um poderoso Raspberry Pi 4B computador de bordo com o versátil Controlador de voo Pixhawk 2.4.8, tornando-o altamente personalizável e drone programável plataforma. Esta Plataforma de drones de código aberto suporta ferramentas de ponta como Dronekit-python, permitindo que os desenvolvedores criem missões autônomas, transmissão de dados em tempo real e aplicativos de processamento de imagem alimentados por IA. Com um quadro robusto de 450 mm, uma câmera HD de 200 MP, uma bateria 3S de 5200 mAh para até 20 minutos de voo e modos de voo avançados, como altitude hold, return-to-home e modo circular, o F450 Drone Kit é a escolha ideal para entusiastas, pesquisadores e educadores que buscam uma experiência inovadora de desenvolvimento de drones.
Principais características
Hardware de alto desempenho
- Raspberry Pi 4B: Alimentado por um processador quad-core de 1,5 GHz e 64 bits, suportando saída de vídeo 4K e comunicação WiFi de alta velocidade para operação confiável.
- Controlador de voo Pixhawk 2.4.8: Equipado com vários sensores integrados, garantindo controle preciso de atitude, pairar e planejamento de missão.
- Suporte à expansão da visão:Emparelhado com uma câmera monocular e ferramentas OpenCV, este kit atende às necessidades de transmissão e processamento de imagens em tempo real.
Diversos modos de voo
- Manter altitude (AltHold): Mantém uma altitude de voo estável.
- Passe o mouse: Fornece pairar estacionário preciso.
- Retornar para casa (Retornar): Retorna automaticamente ao ponto inicial em caso de perda de sinal ou bateria fraca.
- Aterrissagem (Terra): Executa pouso autônomo suave.
- Modo de estabilização: Ajusta a atitude de voo automaticamente.
- Modo Círculo: Executa voos circulares ao redor de um alvo.
- Modo sem cabeça: Remove restrições direcionais para facilitar o controle.
- Retorno fora de controle: Retorna a um local predefinido quando o sinal é perdido.
- Pouso de baixa potência: Pousa com segurança em condições de bateria fraca.
Transmissão de Dados e Processamento de Imagens
- Estabelece uma rede WiFi local por meio de um ponto de acesso integrado sem a necessidade de roteadores externos, permitindo a transmissão de dados e imagens em tempo real.
- Suporta streaming e análise de vídeo baseados em OpenCV, ideal para monitoramento de imagens e aplicações inteligentes.
Especificações
Parâmetros do Drone
| Parâmetro | Detalhes |
|---|---|
| Nome | Kit Drone F450 |
| Distância entre eixos | 450 mm |
| Peso | 1493g (com bateria e Raspberry Pi 4B) |
| Controlador de voo | Pixhawk 2.4.8 controlador de voo de código aberto |
| Computador de bordo | Raspberry Pi 4B |
| Câmera | 200MP HD 1080P |
| Suporte de pairar | Módulo de fluxo óptico e sensor de distância a laser |
| Módulo GPS | GPS m8n |
| Tempo de voo | ~20 minutos (dependendo do ambiente e da missão) |
| Bateria | 3S 5200mAh (11,1 V) |
| Capacidade de carga útil | 500g |
| Resistência ao vento | Nível 3-4 |
| Motor | Céu ensolarado A2212 |
| ESC | Hobbywing 20A ESC (suporta baterias LiPo 3S-4S) |
| Hélices | Hélices autobloqueantes T1045 |
| Altitude Máxima | 2000m (sem interferência) |
| Alcance de voo | 1000m |
| Cenários de voo | Interior / Exterior |
Especificações do controlador de voo Pixhawk 2.4.8
- Processador: ARM STM32F427 Cortex M4 de 32 bits, 168 MHz, 256 KB de RAM
- Sensores:
- Giroscópio L3GD20 de 3 eixos e 6 graus de liberdade
- Acelerômetro/magnetômetro de 3 eixos e 14 bits LSM303D
- Acelerômetro/magnetômetro de 6 eixos MPU6000
- Barômetro de alta precisão MS5611
- Compatibilidade de controle de solo: QGroundControl, Planejador de Missão
- Dimensões: 81 mm x 47 mm x 16 mm; Peso: 37g
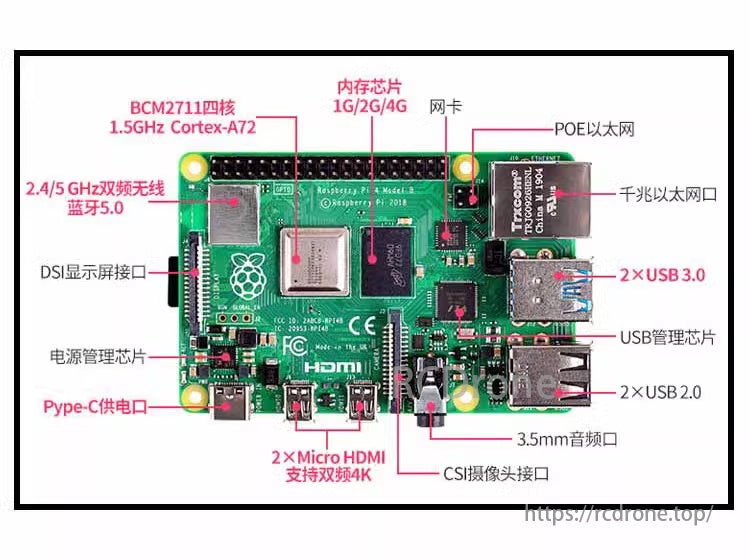
Especificações do Raspberry Pi 4B
- Chipset: Broadcom BCM2711
- CPU: : 64 bits 1,5 GHz quad-core
- GPU: 500MHz VideoCore VI
- BATER: 4 GB DDR4
- Interfaces: 2 x USB 3.0, 2 x USB 2.0
- Saída de vídeo: Duas portas micro HDMI, suporta 4K@60Hz
- Comunicação: Bluetooth 5.0, Wi-Fi 5 (2,4/5 GHz)
- Fonte de energia: USB Tipo C (5V 3A)
O pacote inclui
Configuração 1: Motor SunnySky A2212 com FlySky i6 Remote e Telemetria
- Quadro F450 com trem de pouso
- Motores SunnySky A2212 (4 peças)
- ESCs Hobbywing 20A (4 peças)
- Hélices autobloqueantes T1045 (4 pares)
- Módulo GPS PIX M8n
- Placa de amortecimento de vibração
- Controle remoto FlySky i6
- Bateria 3S 5200mAh
- Carregador de equilíbrio B3
- Suporte para GPS
- Módulo de telemetria de tensão FS

Incluído: Correias de bateria, braçadeiras de nylon, almofadas de madeira, fita adesiva 3M, campainha, ferramentas de instalação
Vídeos de montagem e depuração, materiais relacionados fornecidos; entre em contato com o atendimento ao cliente para obter o código-fonte.
Configuração 2: Motor SunnySky A2212 com Radiolink PRO
- Quadro F450 com trem de pouso
- Motores SunnySky A2212 (4 peças)
- ESCs Hobbywing 20A (4 peças)
- Hélices autobloqueantes 9450 (3 pares)
- PIX.Kit de módulo GPS M8n
- Placa de amortecimento de vibração
- Radiolink PRO (receptor R9DS)
- Bateria de controle 3S 2200mAh
- Bateria 3S 5200mAh
- Carregador de equilíbrio B3
- Suporte para GPS

Incluído: Correias de bateria, braçadeiras de nylon, almofadas de madeira, fita adesiva 3M, campainha, ferramentas de instalação
Vídeos de montagem e depuração, materiais relacionados fornecidos; entre em contato com o atendimento ao cliente para obter o código-fonte.
Montagem do kit drone F450
Cenários de aplicação
O kit de desenvolvimento de drones F450-4B é ideal para:
- Pesquisa e desenvolvimento de drones: Pesquisa universitária, testes de controlador de voo, desenvolvimento de algoritmos.
- Aplicações Inteligentes: Planejamento de caminho, reconhecimento de alvos e prevenção de obstáculos.
- Experimentos Educacionais: Programação, montagem de hardware e depuração.
- Uso de campo: Pairando em ambientes internos, levantamentos externos, monitoramento agrícola e muito mais.
Detalhes
Plataforma de desenvolvimento de drones Raspberry Pi F450-4B
O F450 é um modelo de drone clássico e comumente usado, oferecendo montagem simples e conveniente, alto custo-benefício, grande praticidade e adequação para iniciantes começarem rapidamente a operar drones.

Raspberry Pi 4B atualizado
O poder de processamento do hardware do Raspberry Pi 4B é significativamente maior que o do 3B+.
O Raspberry Pi está equipado com o mais recente sistema de código aberto Ubuntu 20.04, oferecendo uma experiência mais suave em comparação ao sistema Ubuntu Mate.

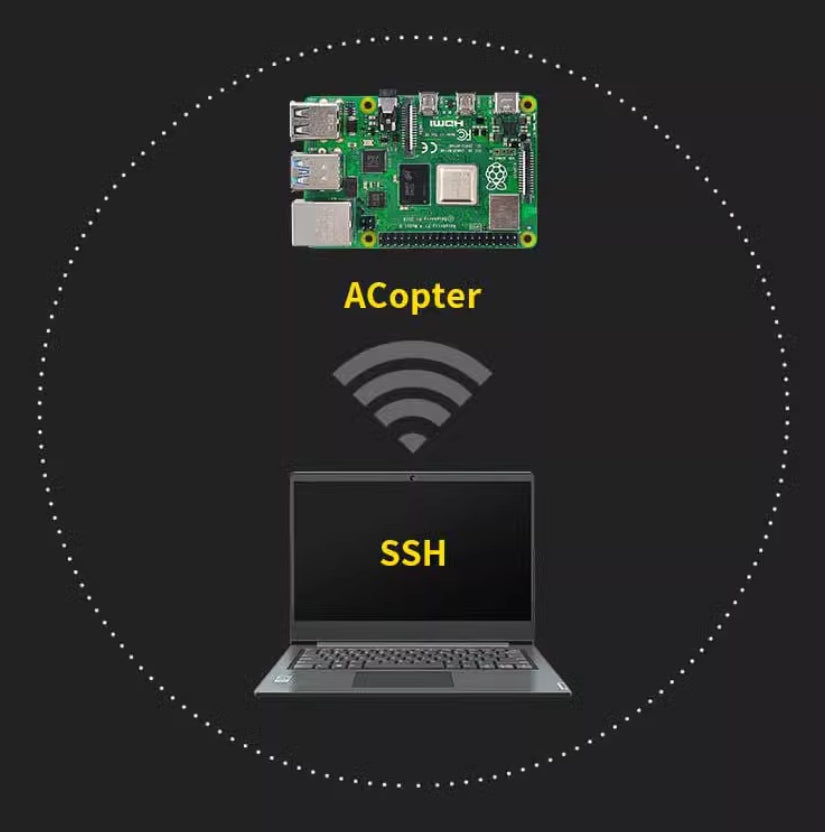
Hotspot WiFi habilitado para sistema (Acopter)
Usando a capacidade WiFi do Raspberry Pi 4B, um hotspot autoconstruído (Acopter) é criado. O PC pode se conectar diretamente ao hotspot WiFi do 4B para formar uma rede local e usar comandos SSH para acesso remoto ao Raspberry Pi. Ao contrário do modelo 3B+ que requer um roteador para configuração de rede, esta configuração é muito mais simples e mais amigável para iniciantes.
Processamento Visual OpenCV
Uma câmera monocular é adicionada, permitindo a transmissão de imagens e o pós-processamento. Os fluxos de vídeo podem ser capturados via Raspberry Pi e processados usando ferramentas como OpenCV. Os fluxos de vídeo HD em tempo real também podem ser transmitidos de volta para um PC para processamento ou para um dispositivo móvel para visualização.

Mais Interface de Expansão
O Raspberry Pi 4B oferece uma ampla gama de interfaces de expansão, incluindo duas portas USB 3.0, duas portas micro HDMI 4K, interfaces CSI e DSI, Gigabit Ethernet e uma fonte de alimentação Tipo C, proporcionando versatilidade excepcional para várias aplicações.
Edição de câmera única
A edição de câmera única inclui um Raspberry Pi 4B e uma câmera monocular, permitindo a comunicação por meio de uma porta serial com o controlador de voo. Ele suporta tarefas como processamento visual, programação Python e comunicação. Esta versão é adequada para usuários com experiência anterior usando Pixhawk, conhecimento básico de Ubuntu (Linux), OpenCV, Raspberry Pi e comunicação de rede local.
Além dos recursos básicos, a edição de câmera única suporta transmissão de imagem e dados por WiFi e permite o controle do drone por meio de Dronekit-python programação.

Posicionamento de fluxo óptico
Controle de pairar em ambientes internos com Dronekit-python em condições de posicionamento de fluxo óptico

Esta plataforma de desenvolvimento de drones oferece suporte ROS, Programação Python, Reconhecimento de imagem OpenCV, Transmissão de longa distância 4G, e Aruco código 2D pouso visual guiado, tornando-o altamente versátil e inovador.

Controle remoto FlySky i6
Equipado com um receptor ia6b pré-carregado com firmware de 10 canais, módulo de telemetria de voltagem e um alcance de controle remoto de mais de 1000 m, ideal para iniciantes aprenderem e praticarem.

Controle remoto Radiolink AT9S
Possui 10 canais com um alcance de controle de mais de 2000 m. Equipado com um módulo de telemetria que fornece dados sobre voltagem da bateria, contagem de satélites GPS, altitude de voo, coordenadas, modo de voo e muito mais.

Perguntas frequentes
1. Posso executar desenvolvimento secundário? Posso programar de forma independente?
A resposta é sim. Como apresentado anteriormente, o Ardupilot é atualmente o sistema de controle de voo de código aberto mais amplamente usado, e muitos excelentes modelos de drones nacionais e internacionais são desenvolvidos com base neste sistema.
O desenvolvimento secundário tem principalmente duas direções: desenvolvimento do controle de voo e expansão externa.
- Desenvolvimento de controle de voo
Usamos o Ardupilot, então aprender sobre desenvolvimento de controle de voo de código aberto envolve principalmente estudar o projeto de código aberto Ardupilot.
- São necessárias fortes habilidades de programação (o código-fonte está em C++), juntamente com conhecimento de matemática avançada (matemática discreta, iteração, linearização), filtragem de Kalman e desenvolvimento embarcado.
- Uma base teórica sólida é necessária. Isso prepara você para trabalhar em desenvolvimento de sistemas não tripulados e P&D de controle de voo.
Se você quiser se concentrar no desenvolvimento do controle de voo, a maior parte do trabalho precisa ser feita no seu computador:
- Configurar o ambiente de programação, baixar o código fonte do controle de voo, estudar sua arquitetura e módulos funcionais, etc.
- Depois de se familiarizar com a estrutura do código, você pode começar a programar com base no código existente.
Comece com um modelo básico de controle de voo e consulte o livro de controle de voo do Ardupilot que fornecemos para orientação.
- Desenvolvimento de Expansão Externa
A expansão externa permite que você adicione dispositivos externos com base em suas tarefas e cenários por meio das interfaces reservadas do controlador de voo. Por exemplo:
- Adicione um módulo de fluxo óptico para posicionamento e pairar em ambientes internos.
- Adicione um radar a laser para evitar obstáculos.
- Use a telemetria para permitir voos autônomos e planejamento de rotas.
- Instale um computador de bordo (por exemplo, Raspberry Pi) e use Dronekit-Python ou ROS para programar o controle do drone.
O objetivo de adicionar um computador de bordo é lidar com tarefas mais complexas, como:
- Usando a câmera do Raspberry Pi para reconhecimento visual (requer OpenCV, YOLO, etc.).
- Combinando protocolos de comunicação para controlar o voo do drone.
- Transmitir dados de voo ou vídeos de alta definição via redes.
Essas funções não podem ser alcançadas apenas confiando no controlador de voo.
O estudo da expansão externa se concentra principalmente em aplicações, o que também é a direção da maioria das competições em todo o país.Depois de aprender, você pode explorar áreas críticas de drones inteligentes, como reconhecimento visual, integração de IA com drones e muito mais.
2. Quais são os pré-requisitos para o desenvolvimento independente?
Aprender sobre drones é um processo gradual. Os sistemas de drones são interdisciplinares e integrativos, envolvendo uma ampla gama de áreas de conhecimento. Para aprender o desenvolvimento de drones, as seguintes bases são necessárias:
- Habilidades práticas básicas, incluindo proficiência no uso de ferros de solda, diversas chaves de fenda e outras ferramentas.
- Conhecimentos básicos de eletrônica: conceitos como tensão, corrente, potência, polaridade e sinais.
- Conhecimento fundamental de controle de automação: controle PID, feedback, sinais digitais, sinais analógicos, etc.
- Conhecimentos básicos de informática: drivers, portas seriais, taxas de transmissão, versões de firmware, versões de software.
- Conhecimento básico sobre drones Pixhawk.
- Conhecimento básico do sistema operacional Ubuntu.
- Proficiência em linguagens de programação: como C++ e Python.
Como fazer um drone Respberry PI?
Related Collections