






Feetech SCS20 - 6V 20kg.cm Código magnético de 360 graus Controle serial TTL Servo 20kg scs servo Bus Packet Communication
Feetech SCS20 - 6V 20kg.cm Código magnético de 360 graus Controle serial TTL Servo 20kg scs servo Bus Packet Communication
Feetech
Não foi possível carregar a disponibilidade de recolha
ESPECIFICAÇÕES
Marca: Feetech
Origem: China Continental
Material: Plástico
Tipo de plástico: PC
Peças e acessórios RC: Baterias - LiPo
Tamanho: 10*10*10
Para tipo de veículo: Carros
Usar: Veículos e brinquedos de controle remoto
Atualizar peças/acessórios: Bateria de lítio
Periféricos/dispositivos de controle remoto: Controle remoto
Suprimentos de ferramentas: Bateria
Quantidade: 1 peça
Parâmetros técnicos: KV1100
Número do modelo: SCS20-360T
Atributos de tração nas quatro rodas: Motores
Distância entre eixos: Parafusos
Número do modelo: STS3020
Tamanho: 40 x 20 x 40,5 mm
Peso: 62g
Tipo de engrenagem: Cobre e alumínio
Ângulo limite: SEM limite
Rolamento: 2 rolamentos de esferas
Estria da engrenagem da buzina: 25T(4,96mm)
Motor: Motor com escova de metal
Faixa de tensão operacional: 6-7,4V
Pico de torque de parada: 20kg.cm@6V
Torque nominal: 6,6kg.cm@6V
Tipo de protocolo: Comunicação serial assíncrona meio duplex
Caso: Alumínio e Plástico
|
1.Aplicar Condição Ambiental 4-1 Corrente ociosa (parado) 10mA 10mA
Função de controle eletrônico:
1.Função de parada de início de aceleração: velocidade e valor de aceleração podem ser definidos, o efeito de movimento é mais suave. 2.Alta precisão, posição absoluta de 360 graus, precisão de 4096 bits, a resolução de posição mais alta é de 0,088 graus, se o controle for de 90 graus, entrada 4096/360 * 90 = 1024, se o controle for de 180 graus, insira 4096/360 * 180 = 2048, para calcular. servo de passo). 1)、Modo 0:Modo de localização, o modo padrão. Neste modo, o controle de ângulo absoluto de 360 graus pode ser realizado. Suporta movimento de aceleração. 2)、Modo 1: Ciclo fechado de velocidade, na interface de programação, o modo de operação é definido como 1, mude para o modo de circuito fechado de velocidade e insira a velocidade correspondente na coluna de velocidade para executar . 3)、Modo 2:Velocidade de malha aberta, na interface de programação, o modo de operação é definido como 2, mude para o modo de velocidade de malha aberta e insira o tempo correspondente na coluna de tempo para executar. 4)、Mode3: Modo passo: na interface de programação, o limite de ângulo máximo/mínimo é definido como 0 e o modo de operação é definido como 3. Mude para o modo passo. Insira a posição na barra de posição para avançar em direção à posição desejada. Clique na posição novamente para continuar a pisar na mesma direção. 4、Modo multi volta, controle absoluto de 360 graus e feedback, sob a mais alta precisão, o controle de posição absoluta pode ser mais ou menos 7 voltas, mas o número de ciclos de energia não é salvo, apenas o valor de feedback de posição absoluta é retido. 5、Calibração de uma chave, instalação de ângulo de 360 graus em qualquer posição, (entrada de endereço 40 (decimal) 128 (decimal)) uma posição atual de correção de chave é o meio (2048 (decimal)). 6、Nível de comunicação TTL, comunicação assíncrona half duplex, suporte a protocolo de barramento para ajustar parâmetros de leitura e gravação e adicionar função de leitura síncrona (enviar um instrução para receber a instrução de leitura de cada servo no barramento por vez.) 7、Múltiplas proteções, (sobrecarga, sobrecorrente, sobretensão, superaquecimento, configuração de chave, alteração de parâmetro de condição) 1)、Proteção contra sobrecarga: através da detecção de posição, durante o movimento da posição inicial para a posição alvo, quando a posição atual é detectada como não sendo a posição alvo após encontrar o bloqueio de obstáculos, a força de descarga dura 2S (20% da força de bloqueio padrão). Até que um novo comando seja acionado, Liberar proteção 2)、Proteção contra sobrecorrente: através do valor de corrente definido, verifique se a corrente atinge o valor de corrente definido. Quando atingir o valor de corrente definido, libere a força (o torque padrão é 0). Até que um novo comando seja acionado, libere a proteção 3)、Proteção contra sobretensão: detecte o valor da tensão atual. Se exceder o valor de tensão definido, o alarme exibirá sobretensão. 4)、Proteção contra superaquecimento: detecta a temperatura atual do motor. Se a temperatura exceder o valor definido, o alarme exibirá superaquecimento. 8: Feedback múltiplo: 1) Feedback de carga: a saída de controle de corrente aciona o ciclo de trabalho de tensão do motor e a escala completa é 1000 = 100% de saída de torque. 4)Feedback de temperatura: temperatura de trabalho interna do servo atual (medição de temperatura)。 5)Feedback de velocidade: feedback da velocidade de rotação atual do motor e o número de etapas na unidade de tempo (por segundo) 9、Abra os parâmetros PID. |




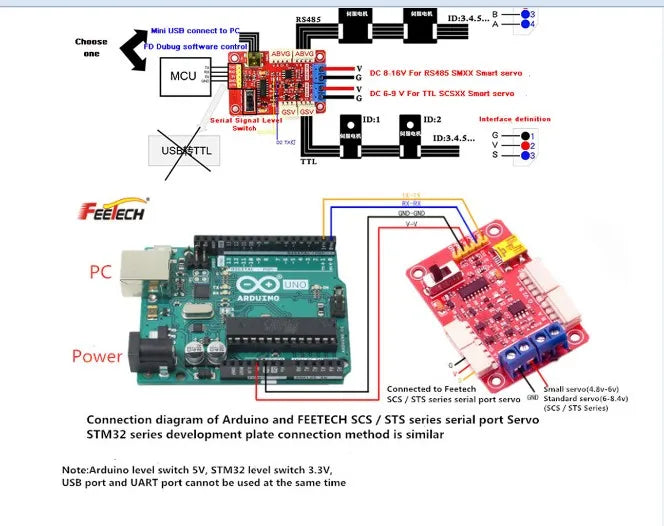
>hmni USB unmChu Chontc Dubuq ior contfo A8-zi DC R I6y Fr RSRS Shr Smuc] >hrtu MCU DC EBYFor ECsX Smor keno 5eal 6i00.
Related Collections






