






Nossos produtos passaram pela certificação CE e ROHS, e a maioria deles solicitou patentes de aparência e patentes de modelo de utilidade
Feetech SCS225-C006 - 7,4 V 19 kg 180 ° 0,192 seg / 60 ° 25T Controle serial BUS Servo Robô Arduin Robô Shafe de eixo duplo roborock iRobot Roomba robô vácuo Servo
Feetech SCS225-C006 - 7,4 V 19 kg 180 ° 0,192 seg / 60 ° 25T Controle serial BUS Servo Robô Arduin Robô Shafe de eixo duplo roborock iRobot Roomba robô vácuo Servo
Feetech
Preço normal
$21.25 USD
Preço normal
Preço de saldo
$21.25 USD
Preço unitário
por
Impostos incluídos.
Envio calculado na finalização da compra.
Não foi possível carregar a disponibilidade de recolha
ESPECIFICAÇÕES
Marca: Feetech
Origem: China Continental
Material: Plástico
Tipo de plástico: PC
Peças e acessórios RC: Baterias - LiPo
Tamanho: 10*10*10
Para tipo de veículo: Carros
Usar: Veículos e brinquedos de controle remoto
Atualizar peças/acessórios: Bateria de lítio
Periféricos/dispositivos de controle remoto: Controle remoto
Suprimentos de ferramentas: Bateria
Quantidade: 1 peça
Parâmetros técnicos: KV1100
Número do modelo: SCS225-C006
Atributos de tração nas quatro rodas: Motores
Distância entre eixos: Parafusos
Número do modelo: SCS225-C006
Tamanho: 45,23 mm x 24,73 mm x 35 mm
Peso: 55± 1g
Tipo de engrenagem: Cobre
Ângulo limite: SEM limite
Rolamento: Rolamentos de esferas
Estria da engrenagem da buzina: 25T
Motor: Motor sem núcleo
Faixa de tensão operacional: 6-7,4V
Pico de torque de parada: 19,5kg.cm@6V
Torque nominal: 6,5kg.cm@6V
Tipo de protocolo: Comunicação serial assíncrona meio duplex
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

Especializado em ODM e OEM e Custom Made 1.Seu logotipo etiqueta ou impressão
2.Servo Wire
3.Embalagem: Saco PE, caixa de cor, caixa de plástico com
seu logotipo
4.Conector de cabo
5.Vários servos personalizados de ampla tensão de trabalho
2.Servo Wire
3.Embalagem: Saco PE, caixa de cor, caixa de plástico com
seu logotipo
4.Conector de cabo
5.Vários servos personalizados de ampla tensão de trabalho
Uso do produto

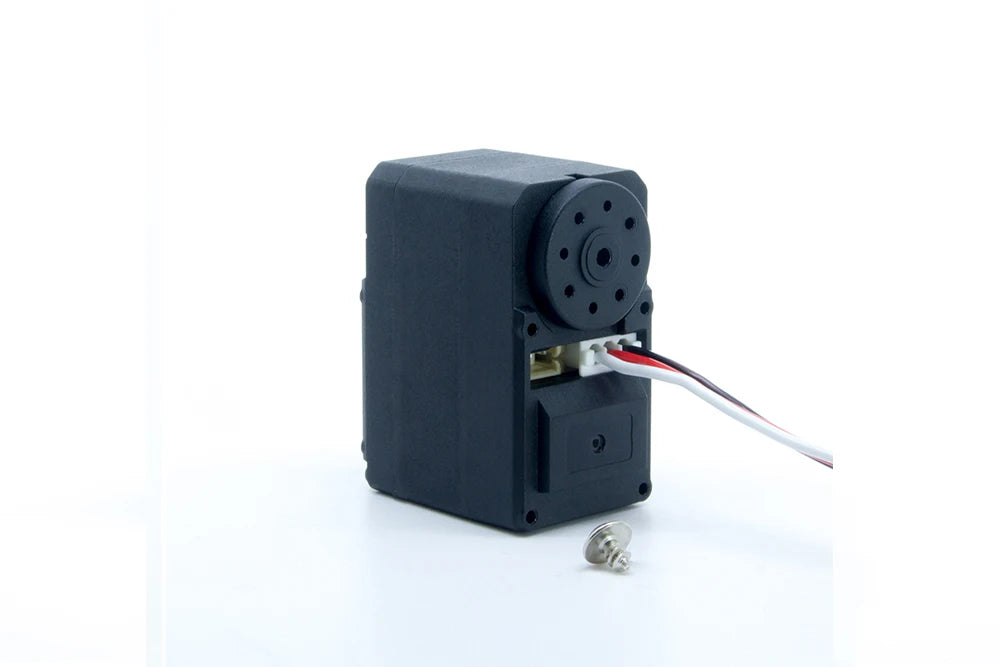
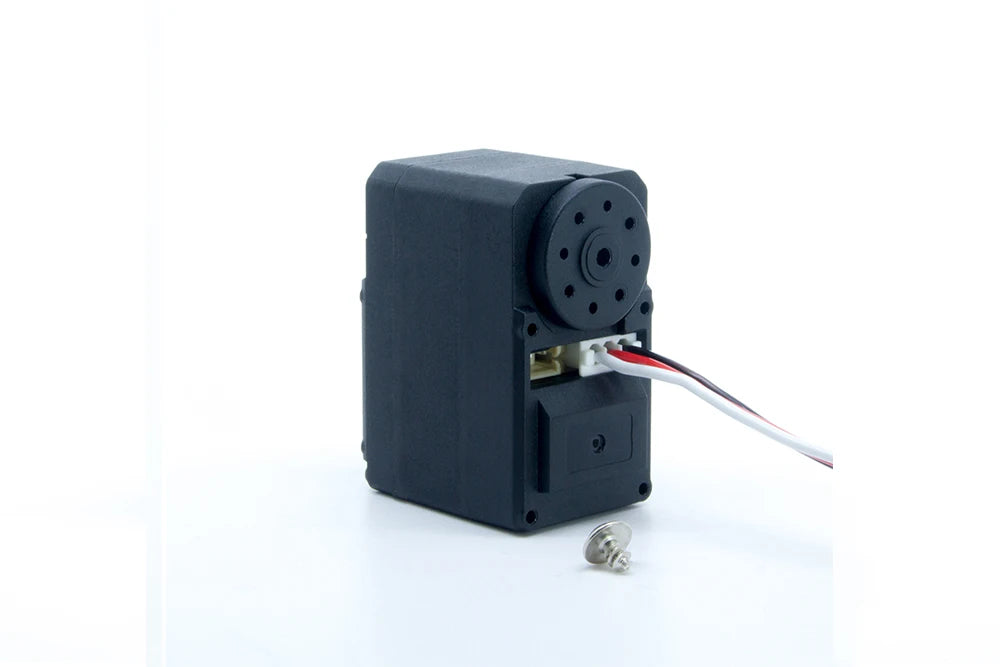
FEETECH 7,4V 20KG.CM Caixa de plástico Codificador magnético de engrenagem de metal Eixo duplo TTL Servo de barramento serial
Imagens de detalhes




Imagens de detalhes
FEETECH 7,4V 20KG.CM Caixa de plástico Codificador magnético de engrenagem de metal Eixo duplo TTL Servo de barramento serial
Função de controle eletrônico:
1.Função de parada de início de aceleração: velocidade e valor de aceleração podem ser definidos, o efeito de movimento é mais suave.
2.Alta precisão, 360 graus posição absoluta precisão de 4096 bits, a resolução de posição mais alta é 0,088 graus, se o controle for 90 graus, insira 4096/360 * 90 = 1024, se o controle for 180 graus, insira 4096/360 * 180 = 2048, para calcular .
3.Existem quatro modos de comutação de trabalho (modo 0 posição servo, modo 1 velocidade de circuito fechado, modo 2 velocidades de circuito aberto, modo 3 passo servo).
1)、 Modo 0: Modo de localização, o modo padrão. Neste modo, o controle de ângulo absoluto de 360 graus pode ser realizado. Suporta movimento de aceleração.
2)、Modo 1: Ciclo fechado de velocidade, na interface de programação, o modo de operação é definido como 1, mude para o modo de circuito fechado de velocidade e insira a velocidade correspondente na coluna de velocidade para executar .
3)、Modo 2:Velocidade de malha aberta, na interface de programação, o modo de operação é definido como 2, mude para o modo de velocidade de malha aberta e insira o tempo correspondente na coluna de tempo para executar.
4)、Mode3: Modo passo: na interface de programação, o limite de ângulo máximo/mínimo é definido como 0 e o modo de operação é definido como 3. Mude para o modo passo. Insira a posição na barra de posição para avançar em direção à posição desejada. Clique na posição novamente para continuar a pisar na mesma direção.
4、Modo multi volta, controle absoluto de 360 graus e feedback, sob a mais alta precisão, o controle de posição absoluta pode ser mais ou menos 7 voltas, mas o número de ciclos de alimentação não é salvo, apenas o valor de feedback de posição absoluta é retido.
5、Uma calibração de chave, instalação em ângulo de 360 graus em qualquer posição, (40 (decimal) entrada de endereço 128 (decimal)) uma posição atual de correção de chave é o meio (2048 (decimal)).
6、Nível de comunicação TTL, comunicação assíncrona half duplex, suporte ao protocolo de barramento para ajustar parâmetros de leitura e gravação e adicionar função de leitura síncrona (enviar uma instrução para receber a instrução de leitura de cada servo no barramento por sua vez.)
7、Múltiplas proteções, (sobrecarga, sobrecorrente, sobretensão, superaquecimento, configuração de chave, alteração de parâmetro de condição)
1)、Proteção contra sobrecarga: através da detecção de posição, durante o movimento da posição inicial para a posição alvo, quando a posição atual é detectada como não sendo a posição alvo após encontrar o bloqueio de obstáculos, a força de descarga dura 2S (20% da força de bloqueio padrão). Até que um novo comando seja acionado, Liberar proteção
2)、Proteção contra sobrecorrente: através do valor de corrente definido, verifique se a corrente atinge o valor de corrente definido. Quando atingir o valor de corrente definido, libere a força (o torque padrão é 0). Até que um novo comando seja acionado, proteção de liberação
3)、Proteção contra sobretensão: detecta o valor da tensão atual. Se exceder o valor de tensão definido, o alarme exibirá sobretensão.
4)、Proteção contra superaquecimento: detecta a temperatura atual do motor. Se a temperatura exceder o valor definido, o alarme exibirá superaquecimento.
8: Feedback múltiplo:
1) Feedback de carga: a saída de controle de corrente aciona o ciclo de trabalho de tensão do motor e a escala completa é 1000 = 100% de saída de torque.
2) Feedback de corrente: A corrente de trabalho do servo, 1 = 6,5mA
3) Feedback de tensão: A tensão de trabalho do servo,70=7V,0,1V
4)Feedback de temperatura: temperatura de trabalho interna do servo atual (medição de temperatura)。
5)Feedback de velocidade: feedback da velocidade de rotação atual do motor e o número de etapas na unidade de tempo (por segundo)
9、Abra os parâmetros PID.
1.Função de parada de início de aceleração: velocidade e valor de aceleração podem ser definidos, o efeito de movimento é mais suave.
2.Alta precisão, 360 graus posição absoluta precisão de 4096 bits, a resolução de posição mais alta é 0,088 graus, se o controle for 90 graus, insira 4096/360 * 90 = 1024, se o controle for 180 graus, insira 4096/360 * 180 = 2048, para calcular .
3.Existem quatro modos de comutação de trabalho (modo 0 posição servo, modo 1 velocidade de circuito fechado, modo 2 velocidades de circuito aberto, modo 3 passo servo).
1)、 Modo 0: Modo de localização, o modo padrão. Neste modo, o controle de ângulo absoluto de 360 graus pode ser realizado. Suporta movimento de aceleração.
2)、Modo 1: Ciclo fechado de velocidade, na interface de programação, o modo de operação é definido como 1, mude para o modo de circuito fechado de velocidade e insira a velocidade correspondente na coluna de velocidade para executar .
3)、Modo 2:Velocidade de malha aberta, na interface de programação, o modo de operação é definido como 2, mude para o modo de velocidade de malha aberta e insira o tempo correspondente na coluna de tempo para executar.
4)、Mode3: Modo passo: na interface de programação, o limite de ângulo máximo/mínimo é definido como 0 e o modo de operação é definido como 3. Mude para o modo passo. Insira a posição na barra de posição para avançar em direção à posição desejada. Clique na posição novamente para continuar a pisar na mesma direção.
4、Modo multi volta, controle absoluto de 360 graus e feedback, sob a mais alta precisão, o controle de posição absoluta pode ser mais ou menos 7 voltas, mas o número de ciclos de alimentação não é salvo, apenas o valor de feedback de posição absoluta é retido.
5、Uma calibração de chave, instalação em ângulo de 360 graus em qualquer posição, (40 (decimal) entrada de endereço 128 (decimal)) uma posição atual de correção de chave é o meio (2048 (decimal)).
6、Nível de comunicação TTL, comunicação assíncrona half duplex, suporte ao protocolo de barramento para ajustar parâmetros de leitura e gravação e adicionar função de leitura síncrona (enviar uma instrução para receber a instrução de leitura de cada servo no barramento por sua vez.)
7、Múltiplas proteções, (sobrecarga, sobrecorrente, sobretensão, superaquecimento, configuração de chave, alteração de parâmetro de condição)
1)、Proteção contra sobrecarga: através da detecção de posição, durante o movimento da posição inicial para a posição alvo, quando a posição atual é detectada como não sendo a posição alvo após encontrar o bloqueio de obstáculos, a força de descarga dura 2S (20% da força de bloqueio padrão). Até que um novo comando seja acionado, Liberar proteção
2)、Proteção contra sobrecorrente: através do valor de corrente definido, verifique se a corrente atinge o valor de corrente definido. Quando atingir o valor de corrente definido, libere a força (o torque padrão é 0). Até que um novo comando seja acionado, proteção de liberação
3)、Proteção contra sobretensão: detecta o valor da tensão atual. Se exceder o valor de tensão definido, o alarme exibirá sobretensão.
4)、Proteção contra superaquecimento: detecta a temperatura atual do motor. Se a temperatura exceder o valor definido, o alarme exibirá superaquecimento.
8: Feedback múltiplo:
1) Feedback de carga: a saída de controle de corrente aciona o ciclo de trabalho de tensão do motor e a escala completa é 1000 = 100% de saída de torque.
2) Feedback de corrente: A corrente de trabalho do servo, 1 = 6,5mA
3) Feedback de tensão: A tensão de trabalho do servo,70=7V,0,1V
4)Feedback de temperatura: temperatura de trabalho interna do servo atual (medição de temperatura)。
5)Feedback de velocidade: feedback da velocidade de rotação atual do motor e o número de etapas na unidade de tempo (por segundo)
9、Abra os parâmetros PID.
Related Collections






