Controlador de vôo HEX Pixhawk 2.1 PX4 PIX 32 bits Piloto automático - The Cube Orange + conjunto padrão com aqui 3 GPS e placa transportadora ADS-B
Controlador de vôo HEX Pixhawk 2.1 PX4 PIX 32 bits Piloto automático - The Cube Orange + conjunto padrão com aqui 3 GPS e placa transportadora ADS-B
RCDrone
Não foi possível carregar a disponibilidade de recolha
ESPECIFICAÇÕES
Distância entre eixos: Parafusos
Uso: Veículos e brinquedos de controle remoto
Atualizar peças/acessórios: Braço
Suprimentos de ferramentas: Classe montada
Parâmetros técnicos: Valor 2
Tamanho: 1
Periféricos/dispositivos de controle remoto: Servos
Idade recomendada: 12+y
RC Peças e acessórios: Servos
Quantidade: 1 unidade
Origem: China continental
Número do modelo: HEX-CUBE+
Material: Metal
Atributos de tração nas quatro rodas: Montagem
Para tipo de veículo: Carros
Certificação: CE
Marca: Feetech
Observação: a diferença entre Cube Orange e Cube Orange+ é que Cube Orange pode ser atualizado para firmware PX4, enquanto Cube Orange+ não suporta atualização de firmware PX4
Para mais informações, visite o site oficial:https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview
Recursos
- Suporta vários modos, como Loitering, Altitude Hold, modo (com Waypoints), modo de seguimento, etc
- Suporta estações de controle de solo Mission Planner e QGroundControl
- Voo integrado registro
- Transmissão de dados de voo em tempo real
- Suporta evitação de objetos em 360 graus
- Equipado com processador H7 de alto desempenho
H7 tem duplo FPU de precisão (DP), 1 MB de RAM e processador CPU de 400 MHz fornecem alto desempenho, operação extremamente rápida e solução estável para vôo.
- Consciência situacional por ADS-B integrado
Um 1090MHz personalizado O receptor ADS-B da uAvionix foi integrado à nova placa portadora ADS-B. Isso fornece uma nova função sem incremento de tamanho. Os UAVs equipados com a nova placa transportadora podem receber atitude de aeronaves comerciais tripuladas dentro do alcance do ADS-B. Isso informa efetivamente o operador UAS para permitir-lhe avaliar os riscos em sua operação atual.
Fácil comutação da tensão do sinal de saída PWM
A saída PWM suporta a comutação entre níveis de sinal de 3,3V e 5V. A comutação de tensão pode ser feita pelo software da estação de controle terrestre. Isso melhora a compatibilidade com vários periféricos externos.
Suporte para vários tipos de veículos: incluindo helicóptero, multicóptero, asa fixa, VTOL, Rover, barco, submarino, etc.
Detalhes do produto
Processador principal:STM32H757(O novo chip tem bom desempenho)
Coprocessador:STM32F1
Sinais RC suportados:PPM/SBUS/DSM
Redundância de energia:Redundância tripla
Sensores:Triplo Sistema IMU
Detalhes dos sensores:ICM20649(acelerômetro integrado+giroscópio)
ICM20602(acelerômetro+giroscópio integrado)
ICM20948(acelerômetro integrado+giroscópio+magnetômetro)
MS5611 x 2 (Baro)
Firmware : Firmware do controlador de vôo de código aberto PX4 não suportado
Tipos de veículos suportados: Aviões de asa fixa 、 Helicópteros com 3-8 motores 、 Helicópteros 、 Aviões VTOL 、 Rovers / barcos / submarinos
Peso: 73g
Material do chassi : liga de alumínio cnc (cubo) + moldagem abs (placa de transporte)
Tamanho cubo:38.4x38.4x22mm
Placa de transporte:94.5x44.3x17.3mm
Temperatura de operação:-10~+55° IMU com controle de temperatura
PWM I/Os:14
Interface serial Mavlink:2
Número de GPS suportados:2
Interface de depuração:1
Interface I2C:1
Interface CAN:2
Aqui3
GNSS:Sim
Bússola:Sim
Protocolo:CAN
Sistema operacional em tempo real:Sim
Atualização de firmware:Sim
RTK:Sim
À prova de poeira, respingos à prova d'água:Sim
Tipo de receptor: módulos GNSS de alta precisão u-blox M8 (M8P)
Constelação de satélite:GPS L1C/A, GLONASS L1OF, BeiDou B1I
Precisão de posicionamento:3D FIX: 2,5m / RTK: 0,025m
Processador: STM32F302
IMU snesor: ICM20948
Taxa de atualização de navegação: Máx. 8 Hz
Protocolo de comunicação: CAN
Temperatura de operação: -40 ° C a 85 ° C
Dimensão: 76 mm x 76 mm x 16,6 mm
Peso:48,8g





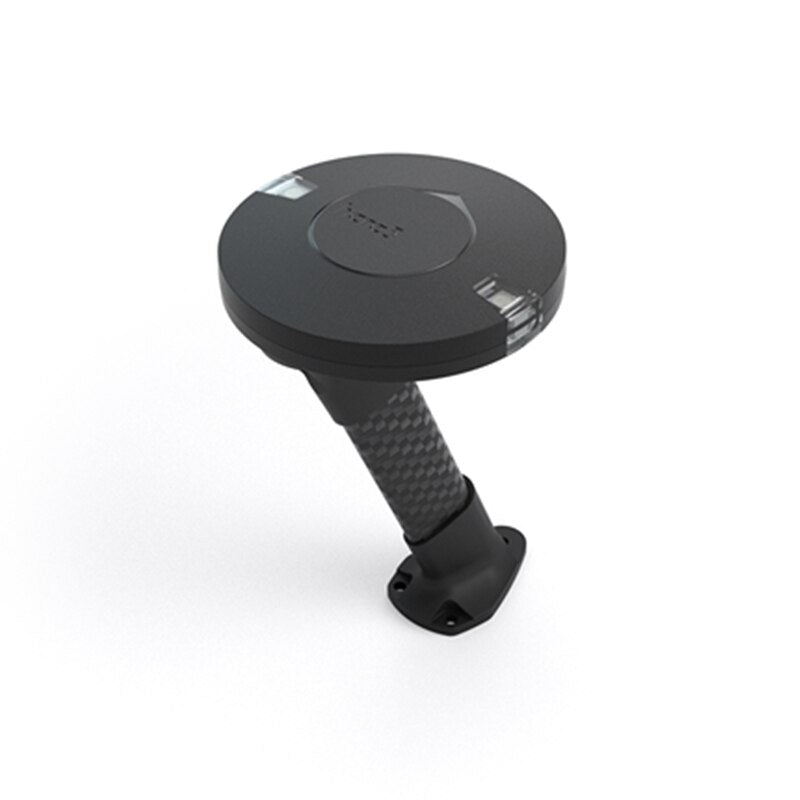
O HEX Pixhawk 2.1 da PX4 é o piloto automático mais avançado do mundo para veículos não tripulados autônomos abertos. Este controlador em forma de cubo apresenta componentes redundantes, com temperatura controlada e isolados.
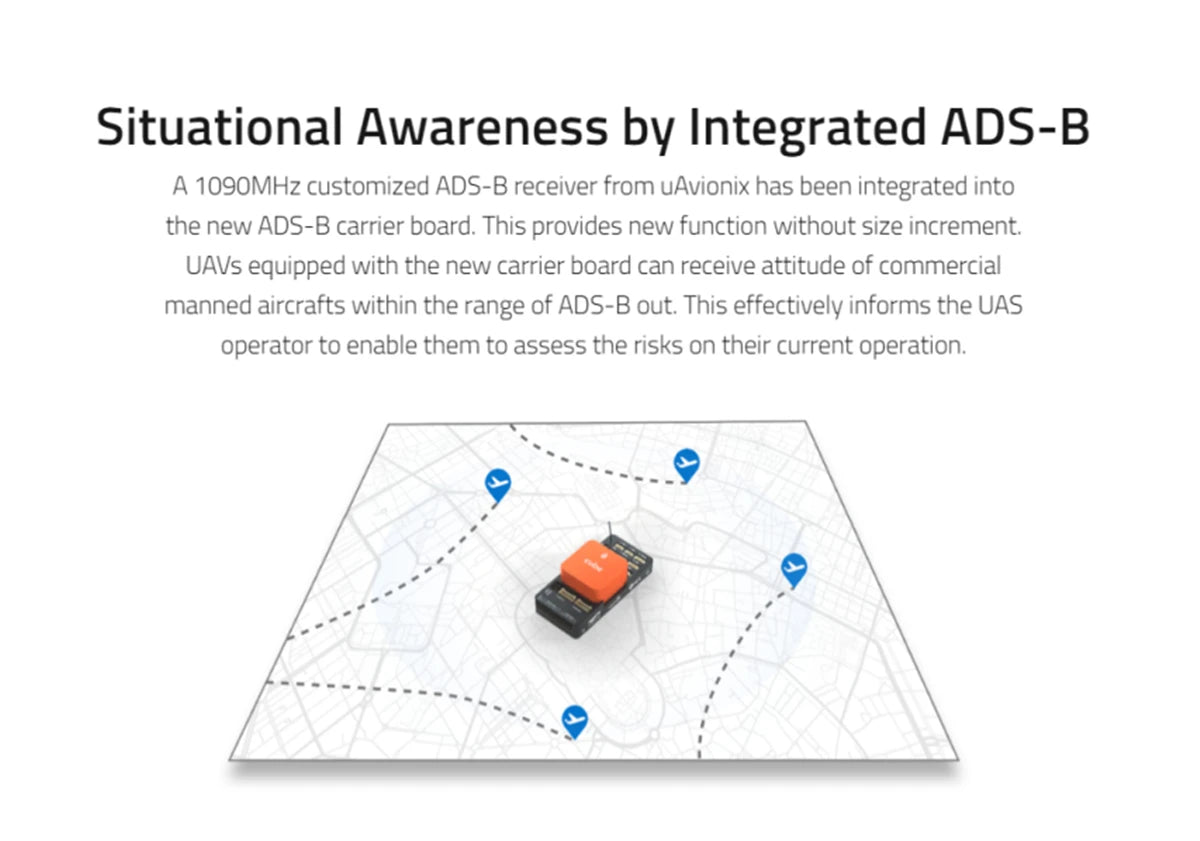
A placa transportadora possui um receptor ADS-B personalizado da uAvionix, operando em 1090 MHz, que permite aos operadores de UAS avaliar riscos potenciais em suas operações atuais.

A saída PWM suporta comutação entre níveis de sinal de 3,3V e 5V, permitindo que você use o software da estação de controle de solo para alternar entre esses dois níveis de tensão.
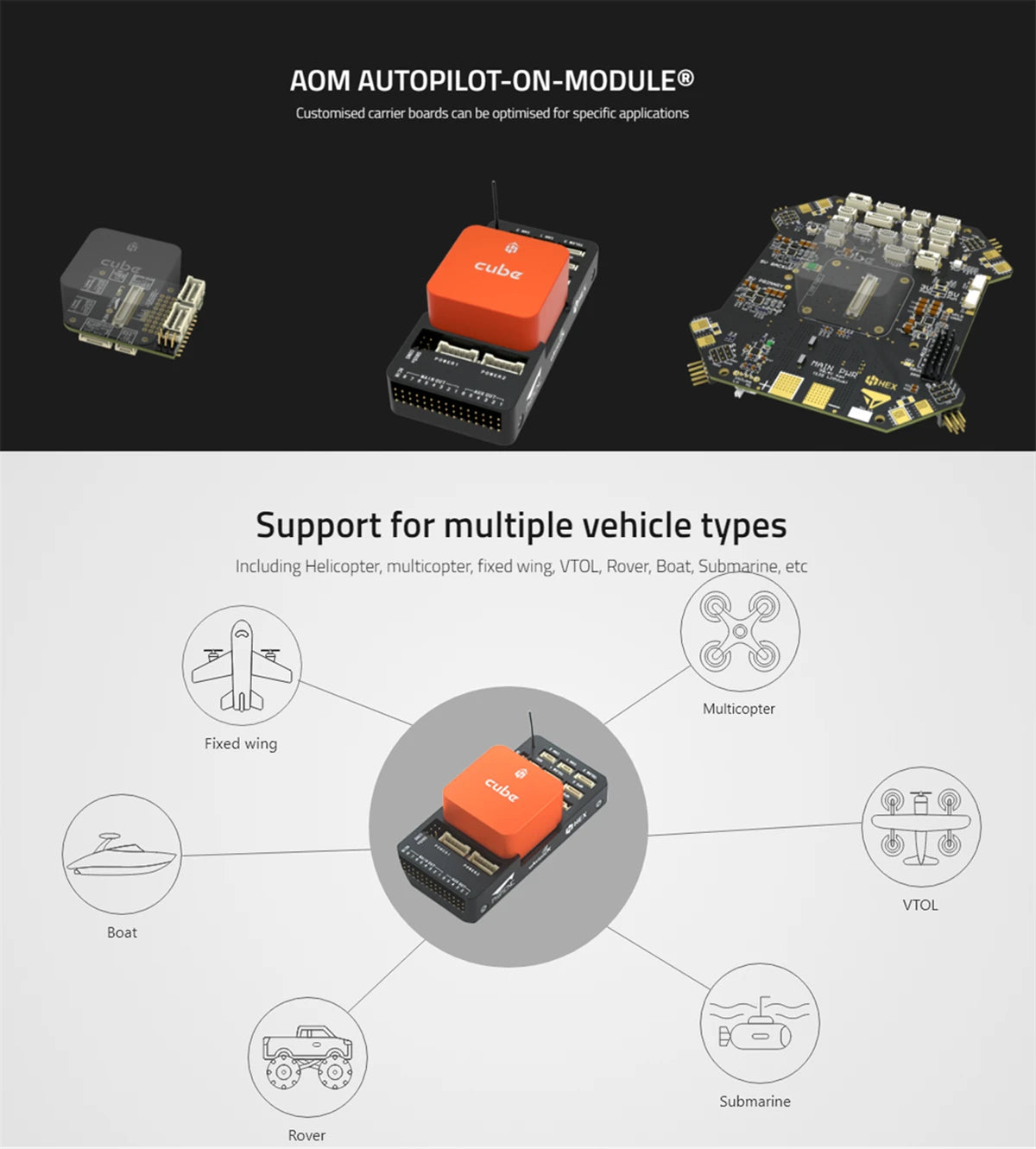
O APM (Autopilot-on-Module) oferece placas transportadoras personalizadas que podem ser otimizadas para aplicações específicas, suportando vários tipos de veículos, incluindo helicópteros, multicópteros, aeronaves de asa fixa, VTOLs, rovers, barcos, submarinos e muitos outros.
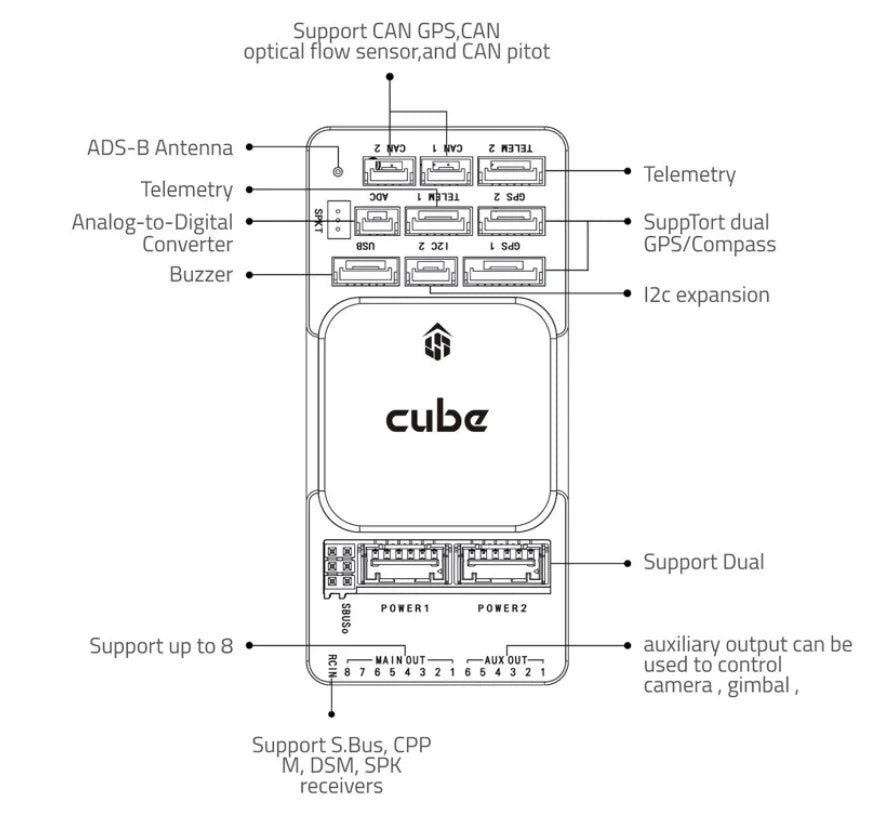
Este controlador de voo suporta vários periféricos, incluindo: * Barramento CAN para GPS, sensor de fluxo óptico e dados pitot * Antena ADS-B para navegação aprimorada * Recursos de telemetria com conversão analógico-digital SD9 * Capacidades de expansão I2C para sensores ou dispositivos adicionais * Opções de fonte de alimentação dupla para redundância * Até 8 saídas auxiliares que podem ser utilizadas para controlar diversos dispositivos, como: + 6 câmeras ou gimbals via protocolo S-Bus

Este controlador de vôo apresenta um design atualizado com resistência à água, tornando-o adequado para uso em vários ambientes. Além disso, ele incorpora um chip GNSS econômico e de alta precisão que permite capacidades de posicionamento preciso (nota: é necessária uma estação base para o modo Cinemático em Tempo Real (RTK)).
Related Collections