


Módulo de Motor de Alto Binário HTDW-5047 50mm 12-48V Encoder 14-bit Relação 9/20/36
Módulo de Motor de Alto Binário HTDW-5047 50mm 12-48V Encoder 14-bit Relação 9/20/36
HIGH TORQUE
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O MOTOR DE ALTO TORQUE HTDW-5047 é uma série de módulos de motor compactos de alto torque, oferecida em três relações de redução (9 / 20 / 36). Apresenta uma resolução de encoder de entrada/saída de 14 bits, uma faixa de tensão de 12-48V e uma frequência de controlo de 3kHz para controlo de movimento e articulações de robótica.
Características Principais
- Modelos: HTDW-5047-9-NE / HTDW-5047-20-NE / HTDW-5047-36-NE
- Baixa folga: <10 Arcmin
- Precisão de posicionamento repetido: <12 Arcmin; precisão de posicionamento absoluto: <15 Arcmin
- Resolução do encoder: 14-bit (entrada) e 14-bit (saída)
- Taxa de transmissão: 5 Mbps; tempo de resposta: ≤200 us
Especificações
| Parâmetro | HTDW-5047-9-NE | HTDW-5047-20-NE | HTDW-5047-36-NE |
|---|---|---|---|
| Comprimento e largura | 50mm | 50mm | 50mm |
| Altura | 47.4mm | 47.4mm | 47mm |
| Peso | 300g | 322g | 321g |
| Folga | <10 Arcmin | <10 Arcmin | <10 Arcmin |
| Precisão de repetição de posicionamento | <12 Arcmin | <12 Arcmin | <12 Arcmin |
| Precisão de posicionamento absoluto | <15 Arcmin | <15 Arcmin | <15 Arcmin |
| Constante de torque | 0.062 Nm/A | 0.062 Nm/A | 0.062 Nm/A |
| Número de pares de pólos | 14 | 14 | 14 |
| Relação de redução | 9 | 20 | 36 |
| Torque de rotor bloqueado | 6 Nm | 12 Nm | 21 Nm |
| RPM sem carga | 260 RPM | 130 RPM | 60 RPM |
| Torque nominal | 1 Nm | 2 Nm | 4 Nm |
| RPM nominal | 170 RPM | 110 RPM | 40 RPM |
| Avaliação | 18 W | 23 W | 17 W |
| Intervalo de tensão | 12-48V | 12-48V | 12-48V |
| Corrente de pico | 10 A | 10 A | 10 A |
| Precisão de controlo de velocidade | ±8% | ±15% | ±15% |
| Resolução do encoder de entrada | 14 bits | 14 bits | 14 bits |
| Taxa de baud | 5 Mbps | 5 Mbps | 5 Mbps |
| Corrente nominal | 2 A | 2 A | 2 A |
| Precisão de controlo | ±10% | ±15% | ±15% |
| Tempo de resposta | ≤200 us | ≤200 us | ≤200 us |
| Resolução do encoder de saída | 14 bits | 14 bits | 14 bits |
| Frequência de controlo | 3 kHz | 3 kHz | 3 kHz |
Para orientação na seleção e suporte pós-venda, contacte [email protected] or visite https://rcdrone.top/.
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV
- Robôs ARU
Manuais
- Manual do Assistente de Depuração do Motor HTDW-5047-9-NE HIGH TORQUE (PDF)
- Manual do Assistente de Depuração do Motor HTDW-5047-20-NE HIGH TORQUE (PDF)
- Manual do Assistente de Depuração do Motor HTDW-5047-36-NE HIGH TORQUE (PDF)
- Manual de Depuração HTDW-5047-9-NE (PDF)
- Manual de Depuração HTDW-5047-20-NE (PDF)
- Manual de Depuração HTDW-5047-36-NE (PDF)
- Análise do Protocolo 1.2 fdcan HTDW-5047-9-NE (PDF)
- Análise do Protocolo 1.2 fdcan HTDW-5047-20-NE (PDF)
- Análise do Protocolo 1.2 fdcan HTDW-5047-36-NE.2 Análise de Protocolo fdcan (PDF)
- Modelo 3D do Motor HTDW-5047-9-NE (STP, ZIP)
- Modelo 3D do Motor HTDW-5047-20-NE (STP, ZIP)
- Modelo 3D do Motor HTDW-5047-36-NE (STP, ZIP)
- Manual do Utilizador HTDW-5047 (PDF)
Detalhes

A série HTDW-5047 combina um formato compacto de 50mm com alto torque para articulações robóticas e controlo de movimento.
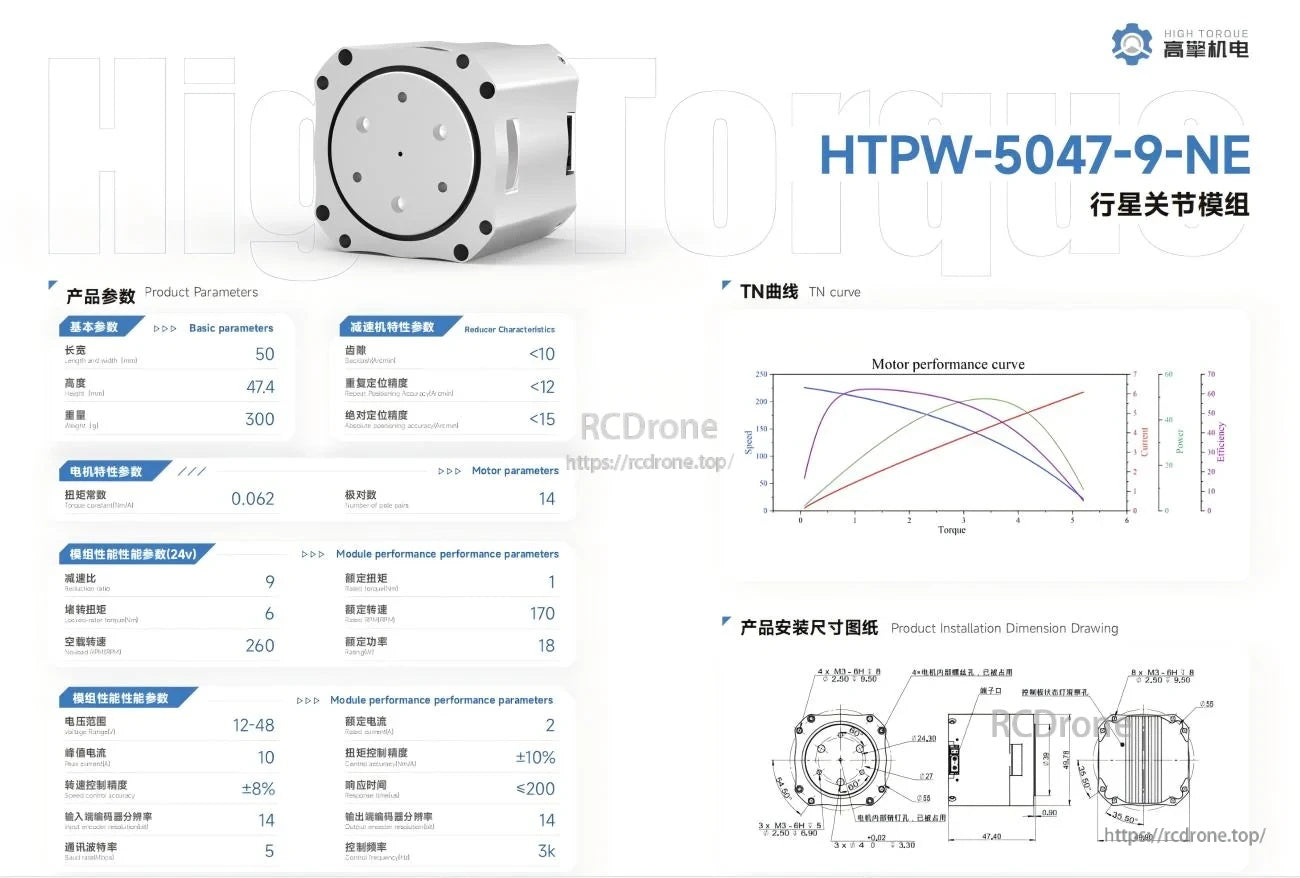
Escolha a versão de redução 9:1 quando a maior velocidade for priorizada, mantendo a mesma área de módulo.
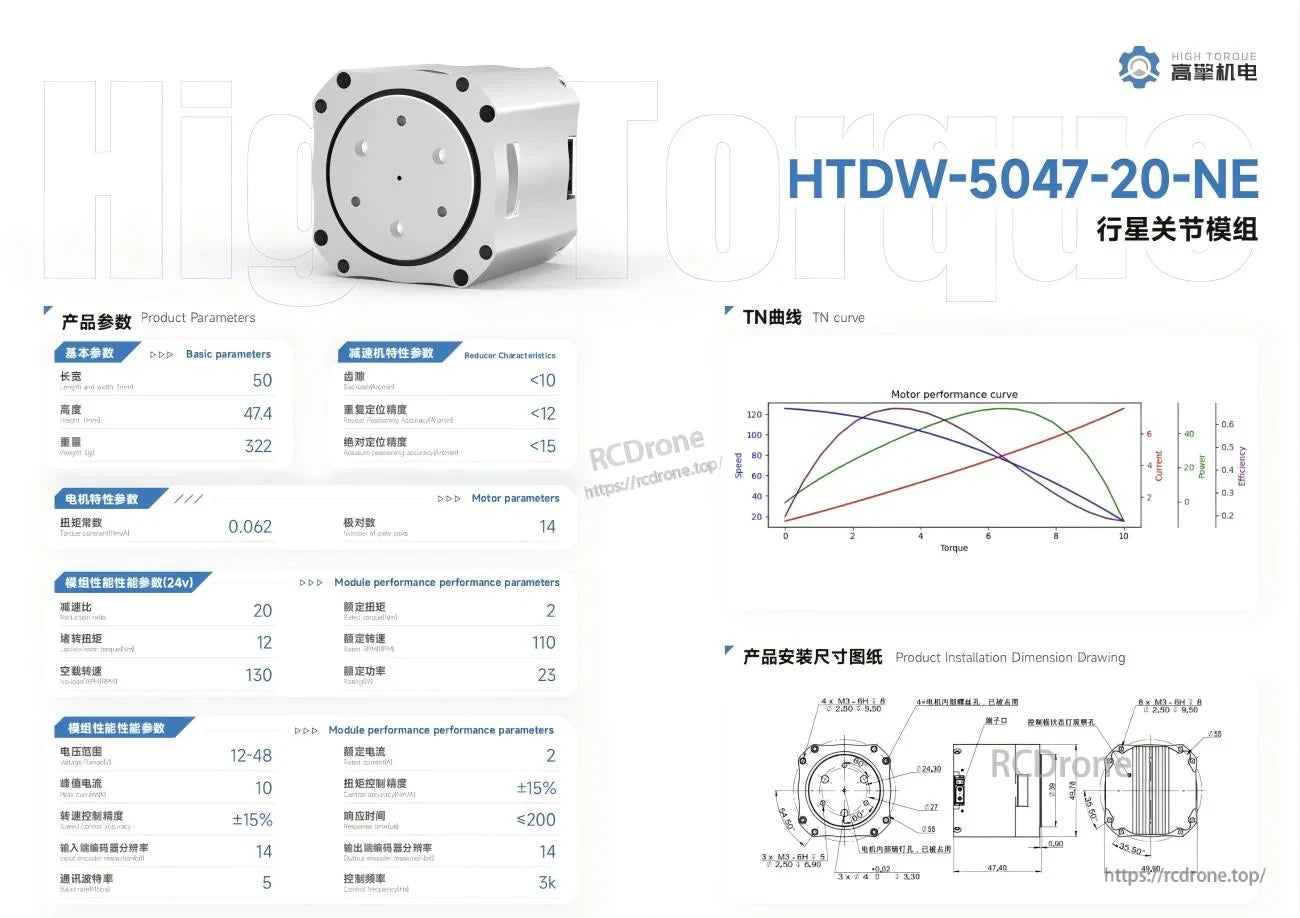
A opção de redução 20:1 equilibra velocidade e torque para articulações e atuadores robóticos de uso geral.
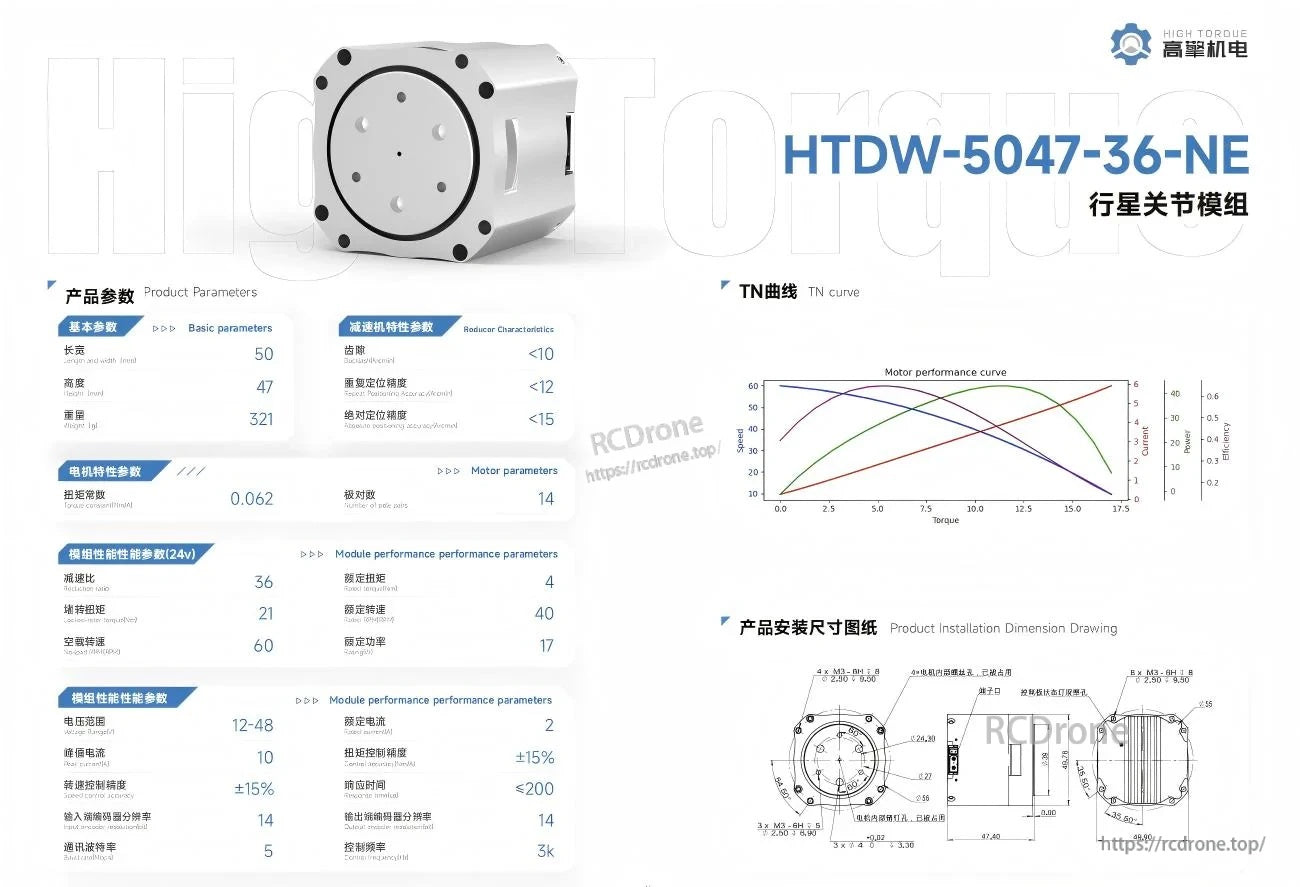
A variante de redução 36:1 é adequada para articulações de baixa velocidade e alto torque, onde o posicionamento preciso é crítico.
Related Collections


