

Módulo de Motor ALTO BINÁRIO HTDW-6056-36-NE, Redução 36:1, 10Nm Nominal, 12-48V, Codificadores 14 bits
Módulo de Motor ALTO BINÁRIO HTDW-6056-36-NE, Redução 36:1, 10Nm Nominal, 12-48V, Codificadores 14 bits
HIGH TORQUE
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O MOTOR DE ALTO TORQUE HTDW-6056-36-NE é um módulo de motor de alto torque com uma relação de redução de 36, projetado para aplicações de juntas e atuadores em robótica que requerem uma saída controlada de baixa velocidade. Os principais parâmetros de operação incluem entrada de 12-48V, torque nominal de 10Nm a 50RPM e torque de rotor bloqueado de 36Nm.
Características Principais
- Marca do modelo: HTDW-6056 / HTDW-6056-36-NE
- Relação de redução: 36
- Baixo retrocesso e desempenho de posicionamento: retrocesso <10Arcmin; precisão de repetição de posicionamento <12Arcmin; precisão de posicionamento absoluto <15Arcmin
- Resoluções do encoder: encoder de entrada 14-bit; encoder de saída 14-bit
- Parâmetros de controle/comunicação: taxa de transmissão 5Mbps; frequência de controle 3kHz; tempo de resposta ≤200us
Especificações
| Comprimento e Largura | 60mm |
| Altura | 56mm |
| Peso | 565g |
| Retrocesso | <10Arcmin |
| Precisão de Repetição de Posicionamento | <12Arcmin |
| Precisão de Posicionamento Absoluto | <15Arcmin |
| Constante de Torque | / |
| Número de Pares de Polo | 14 |
| Relação de Redução | 36 |
| Torque de Rotor Bloqueado | 36Nm |
| RPM sem Carga | 60RPM |
| Torque Nominal | 10Nm |
| RPM Nominal | 50RPM |
| Avaliação | 52W |
| Faixa de Tensão | 12-48V |
| Corrente de Pico | 10A |
| Precisão de Controle de Velocidade | ±10% |
| Resolução do Encoder de Entrada | 14-bit |
| Taxa de Baud | 5Mbps |
| Corrente Nominal | 3A |
| Precisão de Controle | ±20% |
| Tempo de Resposta | ≤200us |
| Resolução do Codificador de Saída | 14-bit |
| Frequência de Controle | 3kHz |
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV
- Robôs ARU
Para questões de integração e confirmação de pré-venda, entre em contato com o suporte em https://rcdrone.top/ ou envie um e-mail para [email protected] .
Manuais
- Assistente de Depuração do Motor de ALTO TORQUE Manual do Usuário (PDF)
- Manual de Depuração (PDF)
- 1.2 Análise do Protocolo FDCAN (PDF)
- Manual do Usuário (PDF)
- Diagrama de Estrutura do Produto HTDW-6056-36-NE (PDF)
- Modelo 3D do Motor de ALTO TORQUE HTDW-6056-36-NE (STP)
Detalhes

Um módulo de motor de junta de alto torque compacto, projetado para saída controlada de atuadores robóticos de baixa velocidade.
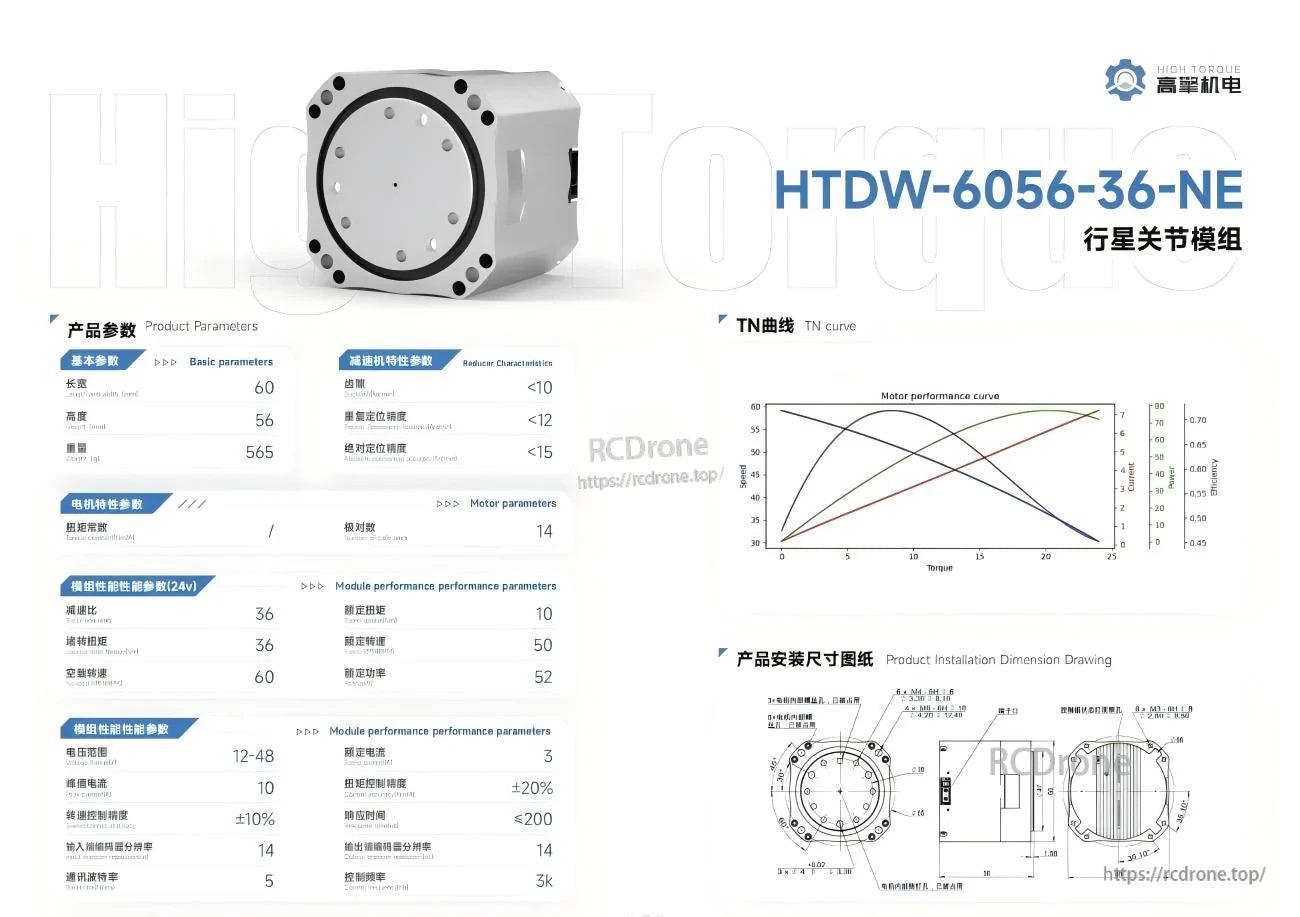
Especificações principais, curva de torque-velocidade e dimensões de instalação estão consolidadas para uma integração mecânica mais rápida.
Related Collections

